一种智能砂浆喷涂抹平机器人及其使用方式、介质的制作方法
本发明涉及一种智能砂浆喷涂抹平机器人及其使用方式、介质,属于机器人。
背景技术:
1、目前在建筑工程入楼宇建造等领域,在建筑主体支架和墙面构建完成后,都需要在墙体表面涂抹水泥砂浆支护层,从而需要用到砂浆喷涂机。首先要进行冲筋找平,然后进行砂浆喷涂,最后进行抹平等操作。目前建筑高处施工需要搭设脚手架进行操作,具有一定安全隐患,且该过程需要保证砂浆抹平精度,技术难度较高,人工成本高、施工效率较低。尤其在高层作业的过程中,经常需要将喷涂机上下移动,费时费力,非常不便。
技术实现思路
1、本发明目的是提供了一种智能砂浆喷涂抹平机器人及其使用方式、介质,不可以减少人员操作,节省人力物力资源。
2、本发明为实现上述目的,通过以下技术方案实现:
3、所述机器人包括:移动底盘、智能控制器、升降机构、机械臂、原料储存模块、泵送机构;
4、移动底盘:接收智能控制器的移动命令,将机器人移动至目标位置;
5、智能控制器:机器人的控制单元,通过读取施工地图和控制移动底盘,并控制升降机构和机械臂运动进行砂浆喷涂作业;
6、升降机构:固定于底盘上方,另一端连接有机械臂,接收智能控制器的指令进行升降操作;
7、机械臂:所述机械臂末端设置有执行机构,接收智能控制器指令进行砂浆喷涂作业;
8、原料储存模块:用于存储砂浆原料,并通过管道连接到执行机构;
9、泵送机构:用于泵送砂浆原料至执行机构。
10、优选的,所述执行机构包含砂浆喷嘴、测距模块和刮平装置,所述测距模块用于检测当前位置与目标距离的距离差,并将距离差信息发送至智能控制器,还用于测量喷涂区域墙面的平整度及垂直度信息,并将采集的信息发送至智能控制。
11、优选的,所述智能控制器内还设置有视觉检测模块,所述视觉检测模块用于确定目标墙面位置,并将位置信息发送至智能控制器。
12、优选的,所述刮平装置设置有重力感知模块、重量感知模块和砂浆清理模块,所述重力感知模块用于感知刮板位姿,并将位姿信息发送至智能控制器,所述重量感知模块用于感知刮板上砂浆重量,并将重量信息发送至智能控制器。
13、一种智能砂浆喷涂抹平机器人使用方法,包括:
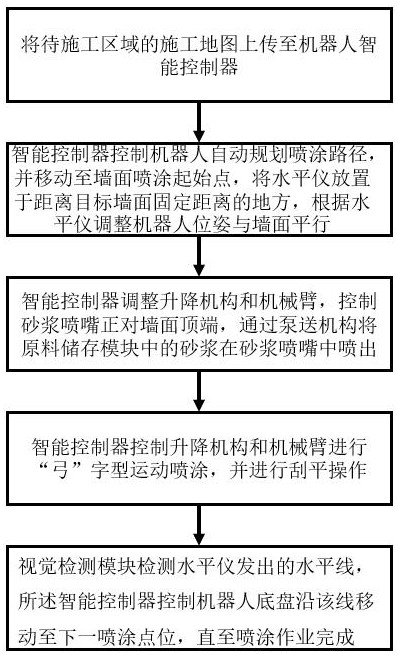
14、将待施工区域的施工地图上传至机器人智能控制器;
15、智能控制器控制机器人自动规划喷涂路径,并移动至墙面喷涂起始点,将水平仪放置于距离目标墙面固定距离的地方,根据水平仪调整机器人位姿与墙面平行;
16、智能控制器调整升降机构和机械臂,控制砂浆喷嘴正对墙面顶端,通过泵送机构将原料储存模块中的砂浆在砂浆喷嘴中喷出;
17、智能控制器控制升降机构和机械臂进行“弓”字型运动喷涂,并进行刮平操作;
18、视觉检测模块检测水平仪发出的水平线,并将检测结构发送至智能控制器,所述智能控制器控制机器人底盘沿该线移动至下一喷涂点位,循环以上喷涂过程,直至整个墙面均匀喷涂砂浆且抹平。
19、优选的,喷涂过程中测距模块测量到的距离当前位置与目标距离的距离差,并将距离差信息发送至智能控制器,当距离差为零时,智能控制器控制移动底盘停止移动。
20、优选的,所述刮平操作具体方式如下:智能控制器控制刮平装置伸出至与喷涂区域墙面下端相贴,智能控制器控制升降机构移动刮平砂浆;
21、当刮板刮至顶端后通过测距模块测量墙面平整度及垂直度信息,智能控制器接收到信息判断不平整区域,控制升降机构和机械臂对该区域进行砂浆并刮平;
22、基于视觉检测机构检测水平仪发出的线,控制机器人底盘沿该线移动至下一喷涂点位,循环以上喷涂过程,直至整个墙面均匀喷涂砂浆且抹平。
23、优选的,所述刮平装置的重力感知模块在刮平过程中感知刮板位姿,并将位姿信息发送至智能控制器,智能控制器调整刮板位姿保证刮板垂直向上运动;
24、所述刮平装置的重量感知模块在刮平过程中感知刮板上砂浆的重量,并将重量发送至智能控制器,智能控制器判断重量是否超过设定阈值,如果超过设定阈值,则智能控制器控制砂浆清理模块对刮平装置清理。
25、本发明的优点在于:本发明集成砂浆喷涂及抹平,提高工作效率。在刮平过程中可根据重力感知模块通过机械臂自适应调节末端刮板角度,保证墙面平整,可以减少人员操作,节省人力物力资源。
技术特征:
1.一种智能砂浆喷涂抹平机器人,其特征在于,包括:移动底盘、智能控制器、升降机构、机械臂、原料储存模块、泵送机构;
2.根据权利要求1所述的智能砂浆喷涂抹平机器人,其特征在于,所述执行机构包含砂浆喷嘴、测距模块和刮平装置,所述测距模块用于检测当前位置与目标距离的距离差,并将距离差信息发送至智能控制器,还用于测量喷涂区域墙面的平整度及垂直度信息,并将采集的信息发送至智能控制。
3.根据权利要求1所述的智能砂浆喷涂抹平机器人,其特征在于,所述智能控制器内还设置有视觉检测模块,所述视觉检测模块用于确定目标墙面位置,并将位置信息发送至智能控制器。
4.根据权利要求2所述的智能砂浆喷涂抹平机器人,其特征在于,所述刮平装置设置有重力感知模块、重量感知模块和砂浆清理模块,所述重力感知模块用于感知刮板位姿,并将位姿信息发送至智能控制器,所述重量感知模块用于感知刮板上砂浆重量,并将重量信息发送至智能控制器。
5.一种智能砂浆喷涂抹平机器人使用方法,其特征在于,包括:
6.根据权利要求5所述的智能砂浆喷涂抹平机器人使用方法,其特征在于,喷涂过程中测距模块测量到的距离当前位置与目标距离的距离差,并将距离差信息发送至智能控制器,当距离差为零时,智能控制器控制移动底盘停止移动。
7.根据权利要求5所述的智能砂浆喷涂抹平机器人使用方法,其特征在于,所述刮平操作具体方式如下:智能控制器控制刮平装置伸出至与喷涂区域墙面下端相贴,智能控制器控制升降机构移动刮平砂浆;
8.根据权利要求7所述的智能砂浆喷涂抹平机器人使用方法,其特征在于,
9.一种计算机可读存储介质,其特征在于其上存储有计算机程序,该程序被处理器执行时实现如上述权利要求5-8任一项所述的方法。
技术总结
本发明提供了一种智能砂浆喷涂抹平机器人及其使用方式、介质,属于机器人技术领域。所述机器人包括:移动底盘、智能控制器、升降机构、机械臂、原料储存模块、泵送机构。所述方法包括:将待施工区域的施工地图上传至机器人智能控制器;智能控制器控制机器人自动规划喷涂路径,并移动至墙面喷涂起始点;智能控制器控制砂浆喷嘴正对墙面顶端,通过泵送机构将原料储存模块中的砂浆在砂浆喷嘴中喷出;智能控制器控制升降机构和机械臂喷涂,并进行刮平操作;所述智能控制器控制机器人底盘沿该线移动至下一喷涂点位,循直至整个墙面均匀喷涂砂浆且抹平。本发明可通过智能控制器自动进行墙面找平及抹平操作,降低人力成本,提高工作效率。
技术研发人员:王妍
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!