一种全自动升降建筑脚手架的制作方法
本发明涉及建筑设备,具体为一种全自动升降建筑脚手架。
背景技术:
1、专利申请号:202222283375.6提供了盘扣式脚手架,属于脚手架技术领域。该盘扣式脚手架包括四个竖直设置的调节杆,四个所述调节杆的顶部连接有同一个水平设置的放置板,所述调节杆的底部连接有主固定杆,所述主固定杆的内部开设有安装腔,所述调节杆与安装腔的内侧壁滑动连接,所述安装腔的内部连接有驱动机构,所述主固定杆上连接有调节机构,通过驱动机构和调节机构之间的配合工作,使四个调节杆可自由地伸长和降低高度,四个调节杆同时伸长和降低高度时,可相应的调节放置板的高度,使放置板的高度调整到施工人员适合的高度,有效地避免了现有的脚手架无法满足施工的不同高度,使施工进程缓慢的情况,大大提升了工作效率。
2、但是上述设备结构较为复杂,不符合生产的需要,整个设备的底部无法保证平衡,在使用过程中会带来一定的安全隐患,另外整个设备在进行调节时,需要同时调节四个调节杆,整个设备使用起来不方便,影响了工程进度,另外整个设备的安全系数较低,安全性是建筑行业的一个重要因素,我们需要考虑到使用方便、安全性能等综合考虑,申请人经过研究发现一款结构简单、使用方便又可以保证使用者安全的设备。
技术实现思路
1、为了解决背景技术中的技术问题,本发明提供了一种全自动升降建筑脚手架,采用的技术方案如下:
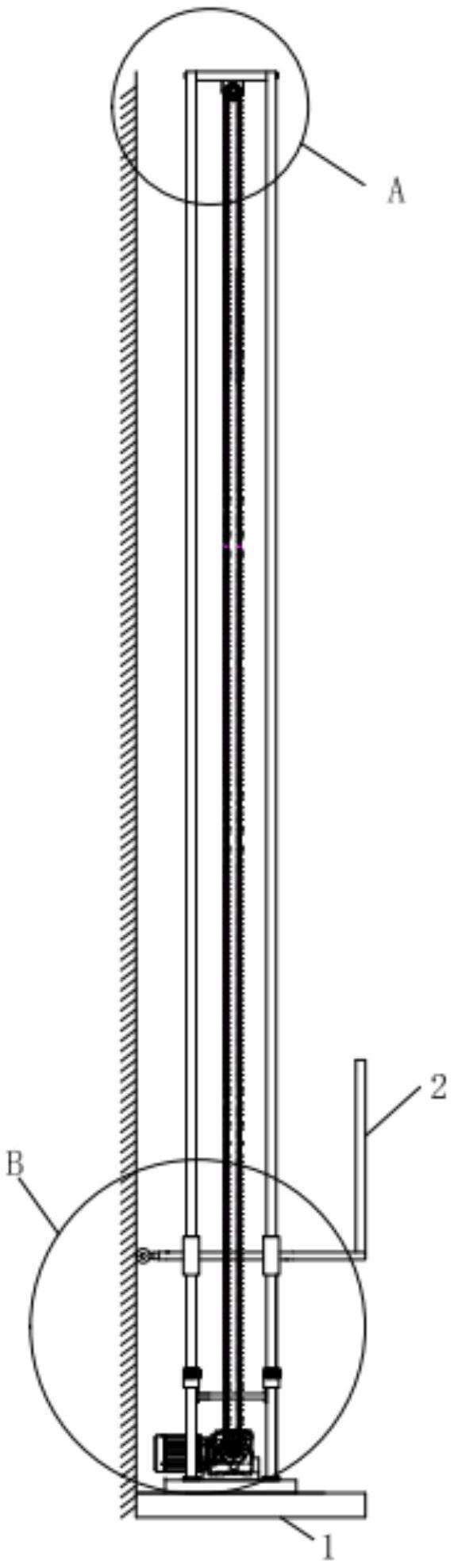
2、一种全自动升降建筑脚手架,其特征在于,包括底座、驱动电机和踏板,底座用于整个设备的支撑,保证设备使用过程中更稳定,保证使用者使用过程中的安全。驱动电机为整个设备的动力来源,所述的底座上安装有支撑架,支撑架用于踏板的支撑,其特征在于,所述的踏板的左右两端分别与套管固定连接,所述的套管活动安装于支撑架上,底座的一端安装有驱动电机,驱动电机的输出轴上活动安装主动轮,所述的主动轮通过链条与从动轮相连接,所述的从动轮活动安装于固定件上,所述的固定件安装于支撑架的顶部,所述的链条与踏板固定连接。
3、本实用新型的工作原理如下:驱动电机带动主动轮旋转,主动轮带动链条旋转,链条带动踏板上下移动,从而形成自动升降的效果。
4、优选地:踏板的后部安装有对称的伸缩杆,所述的伸缩杆上活动连接旋转轮,旋转轮用于与墙面接触,从而更好地保证设备的稳定性。
5、优选地:为了更好地提高设备的使用寿命,所述的支撑架的下部设有对称的缓冲块,缓冲块与套管相对应,缓冲块的材料为橡胶。
6、优选地:为了保证使用者的安全,所述的踏板的左右两侧分别设有支撑杆,所述的支撑杆之间设有防护网,防护网用于保证使用者的安全。
7、优选地:为了防止使用者滑倒,所述的踏板上设有防滑纹。
8、与现有技术相比,本发明具有如下优点:通过本实用新型的结构改进,整个结构更简单、合理,安全性能也得到了明显的提高,整个设备的稳定性也得到明显提高,从而保证整个设备使用起来安全方便,适于全面推广和应用。
技术特征:
1.一种全自动升降建筑脚手架,包括底座(1)、驱动电机(7)和踏板(5),所述的底座(1)上安装有支撑架(4),其特征在于,所述的踏板(5)的左右两端分别与套管(3)固定连接,所述的套管(3)活动安装于支撑架(4)上,底座(1)的一端安装有驱动电机(7),驱动电机(7)的输出轴上活动安装主动轮(71),所述的主动轮(71)通过链条(9)与从动轮(13)相连接,所述的从动轮(13)活动安装于固定件(12)上,所述的固定件(12)安装于支撑架(4)的顶部,所述的链条(9)与踏板(5)固定连接。
2.根据权利要求1所述的一种全自动升降建筑脚手架,其特征在于,所述的踏板(5)的后部安装有对称的伸缩杆(10),所述的伸缩杆(10)上活动连接旋转轮(11)。
3.根据权利要求1所述的一种全自动升降建筑脚手架,其特征在于,所述的支撑架(4)的下部设有对称的缓冲块(6),缓冲块(6)与套管(3)相对应。
4.根据权利要求1所述的一种全自动升降建筑脚手架,其特征在于,所述的踏板(5)的左右两侧分别设有支撑杆(2),所述的支撑杆(2)之间设有防护网(21)。
5.根据权利要求1所述的一种全自动升降建筑脚手架,其特征在于,所述的踏板(5)上设有防滑纹(51)。
技术总结
本发明公开了一种全自动升降建筑脚手架,属于建筑设备技术领域,包括底座、驱动电机和踏板,所述的底座上安装有支撑架,支撑架用于踏板的支撑,所述的踏板的左右两端分别与套管固定连接,所述的套管活动安装于支撑架上,底座的一端安装有驱动电机,驱动电机的输出轴上活动安装主动轮,所述的主动轮通过链条与从动轮相连接,所述的从动轮活动安装于固定件上,所述的固定件安装于支撑架的顶部,所述的链条与踏板固定连接。解决了现有设备结构复杂以及安全性差的技术问题,主要应用于建筑施工方面。
技术研发人员:江红,葛秀花,张培培
受保护的技术使用者:连云港市建设工程质量检测中心有限公司
技术研发日:20230308
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!