一种高精度放线定位异型玻璃幕墙施工装置的制作方法
本技术涉及玻璃幕墙安装,特别是涉及一种高精度放线定位异型玻璃幕墙施工装置。
背景技术:
1、玻璃幕墙,是指由支承结构体系可相对主体结构有一定位移能力、不分担主体结构所受作用的建筑外围护结构或装饰结构。墙体有单层和双层玻璃两种。玻璃幕墙是一种美观新颖的建筑墙体装饰方法,是现代主义高层建筑时代的显著特征。玻璃幕墙分为规则形状以及非规则形状(即异型),在安装的时候需要借助辅助装置。
2、授权公告号为cn217631374u的中国专利公开了一种高精度放线定位异型玻璃幕墙施工装置。包括安装板,所述安装板端壁上设置有运动机构,所述安装板端壁上设置有固定机构,从而实现对幕墙玻璃进行吸附,吸附的比较牢靠,并且能够实现对不同形状的玻璃进行吸附;从而实现带动玻璃进行转动,便于对玻璃进行提升,并且能够通过升降组件的运动,从而带动玻璃上升到需要安装的位置,而且能够实现带动玻璃进行转向,便于进行施工安装,不需要人徒手进行位置矫正;从而实现对装置进行固定,防止在升降安装时出现倾倒晃动,并且能够实现通过制动机构的运动,从而实现装置运动到相应位置进行制动,防止出现移动,造成玻璃幕墙损坏。
3、但是该装置仍然存在着不足之处:该装置吸盘间距固定,当需要安装的玻璃幕墙尺寸较大的时候,利用该固定间距的吸盘进行安装时,幕墙的整体重心很容易偏离吸盘较远,此时吸盘容易失去对玻璃的吸附作用。
技术实现思路
1、本实用新型目的是针对背景技术中存在的问题,提出一种高精度放线定位异型玻璃幕墙施工装置。
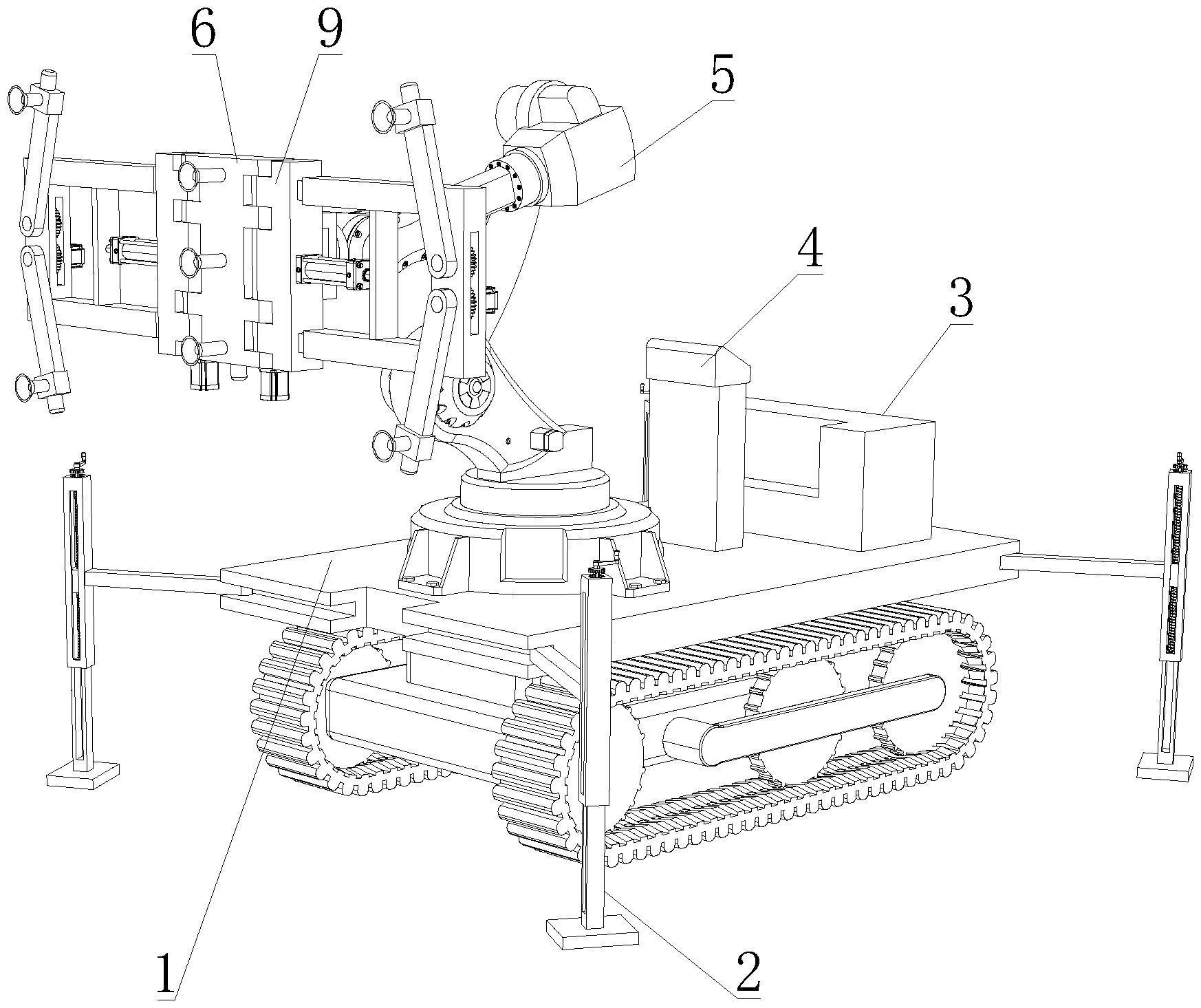
2、本实用新型的技术方案:一种高精度放线定位异型玻璃幕墙施工装置,包括车体、机械臂、活动板和摆臂。
3、车体上设置辅助支撑件,车体上设置配重块和操作台。机械臂设置在车体的平板上,机械臂与配重块分别位于车体平板上方两侧,机械臂驱动连接承重板,承重板上设置若干个与其内部连通的吸盘a,且承重板上设置气泵a,气泵a的输入端插入承重板内并与其内部连通。
4、活动板对称并转动设置在承重板上,承重板上设置两个电机a,两侧电机a分别驱动连接对应侧活动板。活动板上水平设置两个横杆,横杆上套设u型架,u型架与横杆滑动连接,活动板上设置驱动u型架滑动的液压缸。
5、摆臂对称并转动设置在u型架上,摆臂上设置与其内部连通的吸盘b,摆臂上设置气泵b,气泵b的输入端插入摆臂内并与其内部连通。摆臂的转轴上均设置齿轮,两个齿轮啮合连接,且摆臂上设置驱动其中一个齿轮转动的电机b。
6、优选的,辅助支撑件包括固定套、活动杆和曲柄。固定套上设置连杆,连杆与车体转动连接,活动杆滑动设置在固定套内,活动杆的底部设置垫板。固定套内转动设置丝杆,丝杆驱动连接活动杆,曲柄驱动连接丝杆。
7、优选的,丝杆的顶端设置插销,曲柄与插销连接,插销上设置卡块,固定套的顶端设置开口向上的齿槽,卡块位于齿槽内并与其沿水平方向啮合连接,且卡块与齿槽沿竖直方向滑动连接。
8、优选的,车体上设置收纳槽,连杆位于收纳槽内并与其转动连接。
9、优选的,配重块上设置座位槽,座位槽靠近操作台,且座位槽内设置柔性防护垫。
10、优选的,承重板上设置与其内部连通的伸缩管a,承重板上设置驱动伸缩管a伸缩的驱动件a,吸盘a设置在伸缩管a的活动端并与其内部连通。
11、优选的,活动板上设置与其内部连通的伸缩管b,各活动板上均设置驱动伸缩管b伸缩的驱动件b,吸盘b设置在伸缩管b的活动端并与其内部连通。
12、与现有技术相比,本实用新型具有如下有益的技术效果:
13、通过在承重板上设置两各活动板,利用两个电机a分别驱动对应侧活动板,可以使两侧吸盘b的角度得到适应性的调整;通过在固定板上设置u型架与横杆的伸缩结构,利用液压缸的驱动可以调节u型架上吸盘b与吸盘a的距离,并且吸盘b设置在摆臂上,利用电机b驱动两个摆臂转动,可以使两个吸盘之间的间距得到适当的调整,同时本实用新型整体结构稳定性高,操作简单方便,非常实用,适合推广。
技术特征:
1.一种高精度放线定位异型玻璃幕墙施工装置,其特征在于,包括车体(1)、机械臂(5)、活动板(9)和摆臂(14);
2.根据权利要求1所述的一种高精度放线定位异型玻璃幕墙施工装置,其特征在于,辅助支撑件(2)包括固定套(201)、活动杆(203)和曲柄(206);固定套(201)上设置连杆(202),连杆(202)与车体(1)转动连接,活动杆(203)滑动设置在固定套(201)内,活动杆(203)的底部设置垫板(204);固定套(201)内转动设置丝杆(205),丝杆(205)驱动连接活动杆(203),曲柄(206)驱动连接丝杆(205)。
3.根据权利要求2所述的一种高精度放线定位异型玻璃幕墙施工装置,其特征在于,丝杆(205)的顶端设置插销,曲柄(206)与插销连接,插销上设置卡块,固定套(201)的顶端设置开口向上的齿槽,卡块位于齿槽内并与其沿水平方向啮合连接,且卡块与齿槽沿竖直方向滑动连接。
4.根据权利要求1所述的一种高精度放线定位异型玻璃幕墙施工装置,其特征在于,车体(1)上设置收纳槽,连杆(202)位于收纳槽内并与其转动连接。
5.根据权利要求2所述的一种高精度放线定位异型玻璃幕墙施工装置,其特征在于,配重块(3)上设置座位槽,座位槽靠近操作台(4),且座位槽内设置柔性防护垫。
6.根据权利要求1所述的一种高精度放线定位异型玻璃幕墙施工装置,其特征在于,承重板(6)上设置与其内部连通的伸缩管a,承重板(6)上设置驱动伸缩管a伸缩的驱动件a,吸盘a(7)设置在伸缩管a的活动端并与其内部连通。
7.根据权利要求1所述的一种高精度放线定位异型玻璃幕墙施工装置,其特征在于,活动板(9)上设置与其内部连通的伸缩管b,各活动板(9)上均设置驱动伸缩管b伸缩的驱动件b,吸盘b(15)设置在伸缩管b的活动端并与其内部连通。
技术总结
本技术涉及玻璃幕墙安装技术领域,特别是涉及一种高精度放线定位异型玻璃幕墙施工装置,其包括车体、机械臂、活动板和摆臂。车体上设置辅助支撑件,机械臂设置在车体平板上,机械臂驱动连接承重板,承重板上设置吸盘A,气泵A的输入端插入承重板内并与吸盘内部连通。活动板对称并转动设置在承重板上,电机A驱动连接活动板。活动板上水平设置两个横杆,横杆上套设U型架,液压缸驱动连接U型架。摆臂对称设置在U型架上,摆臂上设置吸盘B,气泵B的输入端与吸盘B内部连通。摆臂的转轴上均设置齿轮,两个齿轮啮合连接,且摆臂上设置驱动其中一个齿轮转动的电机B。本技术能够对不同尺寸以及不同形状的玻璃幕墙进行安装,且稳定性高。
技术研发人员:杨建国,李炜,宋俊明,马永亮,王伟,杨世硕
受保护的技术使用者:中冶交通建设集团有限公司
技术研发日:20230315
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!