一种架空地面铺装机器人及铺装系统的制作方法
本技术涉及室内装修,具体涉及一种架空地面铺装机器人及铺装系统。
背景技术:
1、装配式架空地面系统是指主要采用干式工法工厂生产、现场组合安装而成的集成化地面,由可调节的支撑地脚使地面达到统一高度,然后在其上安装地面基层板,地面基层板的上方可敷设采暖管道,然后在地面基层板上方铺设地面饰面材料,架空空腔内可以敷设排水、电气等管线设备,架空地面系统因具有便于调平、全干法作业、高效快捷、架空层内可敷设地面管线、便于检修等优点而在当前室内装修市场被广泛需求。
2、目前架空地面系统的铺装全部依靠人工操作,如中国专利cn112982916公开的一种架空地暖地面的铺装方法,包括如下步骤,步骤一、定位,对待铺装地暖模块的地面进行测量、放线和定位;步骤二、安放地脚组件,根据定位点将地脚组件放置在楼板上;步骤三、安装地暖单元模块,将地暖单元模块安装于地脚组件上;步骤四、调平,通过调整地脚组件对地暖单元模块的水平度进行调整以使得地暖单元模块所铺设而成的地暖地面为水平面;步骤五,将地暖单元模块1固定于地脚组件2上;步骤六、铺管,铺设热水管并完成水压试验;步骤七、铺设饰面层。前述现有技术中,安放地脚组件、地脚组件的调平、地暖单元模块的安装、以及饰面板的铺装均通过人工操作,铺装效率较低,铺装精度依赖人工调平精度,难以维持在高精度水平。
3、又如中国专利cn108049592a公开的地面铺装方法,包括将至少两个底盘上背向第二接插部的表面固定于毛坯地面上;将每个第一接插部插接于对应的第二接插部上,使支撑件架设于底盘上;通过旋转螺柱调节支撑件的高度,使每个承载面均位于同一水平面上;将龙骨和地面饰板复合后直接安装在所述承载面上,由至少两个承载面对龙骨进行支撑,以完成地面的铺装。前述现有技术虽然解决了地面的找平的问题,提高了管线铺装的便捷性,降低了对工人的技术要求,并降低了人工成本,但其安装支撑件、支撑件高度调整、地面饰板的铺装操作均依靠人工操作,其铺装效率和铺装精度仍难以有更进一步的突破。
4、有鉴于此,本实用新型提供了一种架空地面铺装机器人及铺装系统,相比于现有技术来说,整个架空地面的铺装过程中的关键步骤依靠机器人装置完成,有效降低了劳动强度,提高了支撑器的安装精度及安装效率,提高了架空地面铺装的平整度的一致性,提高了安装效率,降低了综合成本。
技术实现思路
1、本实用新型意在提供一种架空地面铺装机器人及铺装系统,以解决现有技术中存在的不足,本实用新型要解决的技术问题通过以下技术方案来实现。
2、一种架空地面铺装机器人,包括机器人本体,所述机器人本体包括机器人底盘、机械臂、夹持部和控制装置,所述机器人底盘的位置可移动,所述机械臂包括固定端和活动端,所述机械臂的固定端与所述机器人底盘相连接,所述机械臂的活动端在水平面内的位置以及高度位置均可移动,所述夹持部安装于所述机械臂的活动端的端部,所述夹持部用于对支撑器和/或地板进行夹持,所述控制装置设置于所述机器人本体上,用于分别控制所述机器人底盘、机械臂、夹持部的工作。
3、优选的,所述机械臂的活动端安装有深度相机,所述深度相机与所述控制装置之间电连接。
4、优选的,所述机械臂的活动端安装有打胶模块,所述打胶模块与所述控制装置之间电连接。
5、优选的,所述机械臂的活动端安装有水平仪,所述水平仪与所述控制装置之间电连接。
6、优选的,所述机械臂的活动端安装有激光测距模块,所述激光测距模块与所述控制装置之间电连接。
7、优选的,所述机器人底盘上设有支撑器高度调节模块,用于调节支撑器的高度,所述支撑器高度调节模块与所述控制装置之间电连接。
8、优选的,所述夹持部包括柔性夹爪,所述柔性夹爪用于对支撑器和/或地板进行夹持。
9、优选的,所述夹持部包括若干吸盘夹爪,所述吸盘夹爪用于对支撑器和/或地板进行夹持。
10、本实用新型还提供一种架空地面铺装系统,包括如前述任一所述的铺装机器人。
11、优选的,还包括运输机器人,所述运输机器人和所述控制装置之间电连接,用于承载及运输支撑器和/或地板。
12、本实用新型工作时,通过运输机器人将支撑器运输至铺装机器人附近,将支撑器放置于机器人底盘上的支撑器高度调节模块内,通过控制系统控制深度相机扫描支撑器目标安装位置处的地面起伏情况,以获知安装位置最高点,并获知支撑器需调节的高度,通过支撑器高度调节模块对支撑器的高度进行调整,然后将支撑器上推至机器人底盘的上表面以上,调整机械臂活动端的位置以使夹持部到达支撑器的位置处以对支撑器进行夹持,并通过打胶模块在目标安装位置涂上一定量的结构胶,通过机械臂调整支撑器水平放置并与安装位置最高点相抵接,通过结构胶将支撑器水平固定于安装位置最高点的顶部,支撑器的底部与地面之间的空隙均填充结构胶,支撑器底部的结构胶通过支撑器下盖的工艺孔处溢出,在工艺孔处干结形成胶钉,胶钉的上端部的尺寸大于工艺孔上端口的尺寸,从而将支撑器与地面的位置固定,然后继续进行其他支撑器的安装。同理,通过机器人本体安装地板时,通过运输机器人将地板运输至铺装机器人附近,调整机械臂活动端的位置以使夹持部与待夹持的地板的上表面抵接,夹持部对地板进行夹持,控制系统控制深度相机扫描支撑器,以获知支撑器的位置及其上表面的高度,从而确定地板的下落位置,调整机械臂活动端的位置以将地板的四个角部搭接于支撑器上。
13、本实用新型提供的一种架空地面铺装机器人及铺装系统,取代了人工铺装,整个架空地面的铺装过程中运输支撑器和地板、安装支撑器和地板均通过铺装机器人实现,有效降低了劳动强度,提高了支撑器和地板的安装效率,降低了综合成本。
技术特征:
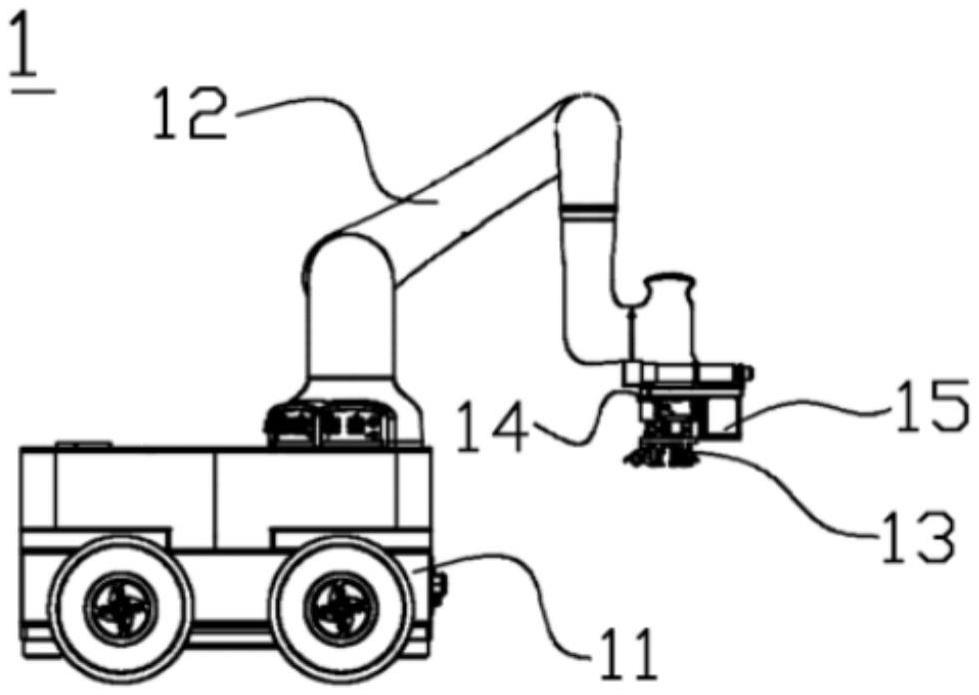
1.一种架空地面铺装机器人,其特征在于:包括机器人本体(1),所述机器人本体(1)包括机器人底盘(11)、机械臂(12)、夹持部(13)和控制装置,所述机器人底盘(11)的位置可移动,所述机械臂(12)包括固定端和活动端,所述机械臂(12)的固定端与所述机器人底盘(11)相连接,所述机械臂(12)的活动端在水平面内的位置以及高度位置均可移动,所述夹持部(13)安装于所述机械臂(12)的活动端的端部,所述夹持部(13)用于对支撑器(3)和/或地板(5)进行夹持,所述控制装置设置于所述机器人本体(1)上,用于分别控制所述机器人底盘(11)、机械臂(12)、夹持部(13)的工作。
2.根据权利要求1所述的一种架空地面铺装机器人,其特征在于:所述机械臂(12)的活动端安装有深度相机(14),所述深度相机(14)与所述控制装置之间电连接。
3.根据权利要求1所述的一种架空地面铺装机器人,其特征在于:所述机械臂(12)的活动端安装有打胶模块(16),所述打胶模块(16)与所述控制装置之间电连接。
4.根据权利要求1所述的一种架空地面铺装机器人,其特征在于:所述机械臂(12)的活动端安装有水平仪(15),所述水平仪(15)与所述控制装置之间电连接。
5.根据权利要求1所述的一种架空地面铺装机器人,其特征在于:所述机械臂(12)的活动端安装有激光测距模块,所述激光测距模块与所述控制装置之间电连接。
6.根据权利要求1所述的一种架空地面铺装机器人,其特征在于:所述机器人底盘(11)上设有支撑器高度调节模块(17),用于调节支撑器(3)的高度,所述支撑器高度调节模块(17)与所述控制装置之间电连接。
7.根据权利要求1所述的一种架空地面铺装机器人,其特征在于:所述夹持部(13)包括柔性夹爪,所述柔性夹爪用于对支撑器(3)和/或地板(5)进行夹持。
8.根据权利要求1所述的一种架空地面铺装机器人,其特征在于:所述夹持部(13)包括若干吸盘夹爪,所述吸盘夹爪用于对支撑器(3)和/或地板(5)进行夹持。
9.一种架空地面铺装系统,其特征在于:包括如权利要求1-8任一所述的铺装机器人。
10.根据权利要求9所述的一种架空地面铺装系统,其特征在于:还包括运输机器人(2),所述运输机器人(2)和所述控制装置之间电连接,用于承载及运输支撑器(3)和/或地板(5)。
技术总结
本技术涉及一种架空地面铺装机器人,包括机器人本体,机器人本体包括机器人底盘、机械臂、夹持部和控制装置,机器人底盘的位置可移动,机械臂包括固定端和活动端,机械臂的固定端与机器人底盘相连接,机械臂的活动端在水平面内的位置以及高度位置均可移动,夹持部安装于机械臂的活动端的端部,夹持部用于对支撑器和/或地板进行夹持,控制装置设置于机器人本体上,用于分别控制机器人底盘、机械臂、夹持部的工作。本技术相比于现有技术来说,整个架空地面的铺装过程中的关键步骤依靠机器人装置完成,有效降低了劳动强度,提高了支撑器的安装精度及安装效率,提高了架空地面铺装的平整度的一致性,提高了安装效率,降低了综合成本。
技术研发人员:廖伟,李桦
受保护的技术使用者:攀雀(北京)智能科技有限责任公司
技术研发日:20230426
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!