一种移动喷涂机器人的制作方法
本技术涉及喷涂,尤其涉及一种移动喷涂机器人。
背景技术:
1、针对建筑墙面施工,一般采用人工喷涂方法来实现墙面喷涂。然而,采用人工喷涂的方式,不但喷涂漆膜厚度不均匀,喷涂作业的自动化程度很低,而且操作工人劳动强度大,甚至长时间工作会危害操作工人的身心健康。另外,喷涂机器人一般采用固定安装模式,固化了机器人的工作空间,对作业中的门窗需避开的部分无法操作,也无法针对墙面的实际工况智能选择喷涂路径,严重影响了作业效率。
技术实现思路
1、本实用新型的目的在于提供一种移动喷涂机器人,可解决墙面喷涂质量低、费时费力、机器人不可移动的问题。
2、为了实现上述目的,本实用新型采用如下技术方案:
3、一种移动喷涂机器人,包括运动系统、视觉系统、喷涂系统和电源系统;所述运动系统包括移动平台、外壳、机械臂和控制柜,用于机器人全向移动;所述视觉系统包括3d相机和相机升降装置,用于自动规划喷涂路径;所述喷涂系统包括喷枪、气泵和料仓,用于喷涂作业;所述电源系统包括电池组和市电两套供电系统,用于供电;
4、所述移动平台是机器人的移动行走机构;所述机械臂用于控制所述喷枪的运动,安装于所述外壳上,与所述控制柜通过线缆进行通信;所述外壳安装于所述移动平台上;所述控制柜用于控制所述机械臂,安装于所述移动平台上;
5、所述3d相机用于获取工作房间点云信息及规划喷涂路径,安装于所述相机升降装置上;所述相机升降装置用于所述3d相机的升降运动,安装于所述外壳上;
6、所述喷枪用于空气雾化,安装于所述机械臂末端;所述气泵用于驱动喷枪,安装于所述移动平台上;所述料仓用于涂料供给,安装于所述移动平台上。
7、进一步地,所述电池组配有备用电池。
8、本实用新型与现有技术相比,其有益效果在于:一种移动喷涂机器人,具有全向移动能力,能够调用智能决策算法,科学设计喷涂路径,自动化程度高。
技术特征:
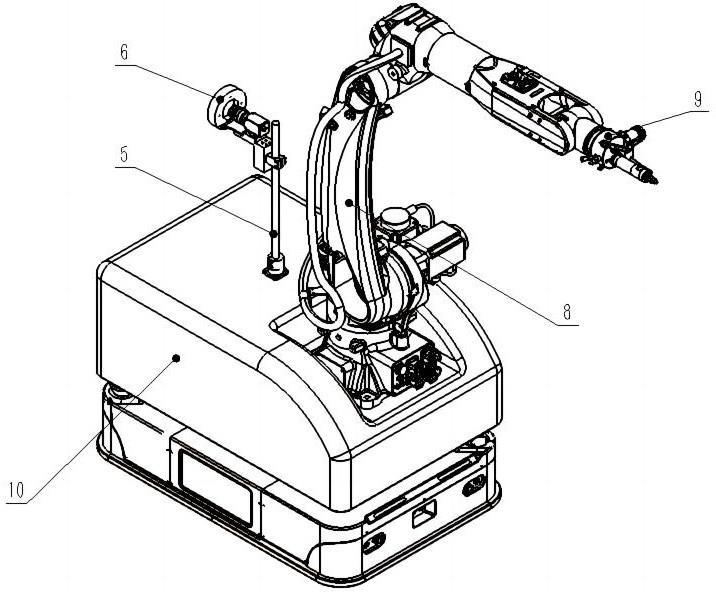
1.一种移动喷涂机器人,其特征在于,包括运动系统、视觉系统、喷涂系统和电源系统;所述运动系统包括移动平台(1)、外壳(10)、机械臂(8)和控制柜(7),用于机器人全向移动;所述视觉系统包括3d相机(6)和相机升降装置(5),用于自动规划喷涂路径;所述喷涂系统包括喷枪(9)、气泵(3)和料仓(4),用于喷涂作业;所述电源系统包括电池组(2)和市电两套供电系统,用于供电;所述移动平台(1)是机器人的移动行走机构;所述机械臂(8)用于控制所述喷枪(9)的运动,安装于所述外壳(10)上,与所述控制柜(7)通过线缆进行通信;所述外壳(10)安装于所述移动平台(1)上;所述控制柜(7)用于控制所述机械臂(8),安装于所述移动平台(1)上;所述3d相机(6)用于获取工作房间点云信息及规划喷涂路径,安装于所述相机升降装置(5)上;所述相机升降装置(5)用于所述3d相机(6)的升降运动,安装于所述外壳(10)上;所述喷枪(9)用于空气雾化,安装于所述机械臂(8)末端;所述气泵(3)用于驱动喷枪(9),安装于所述移动平台(1)上;所述料仓(4)用于涂料供给,安装于所述移动平台(1)上。
2.根据权利要求1所述的一种移动喷涂机器人,其特征在于,所述电池组(2)配有备用电池。
技术总结
本技术公开了一种移动喷涂机器人,涉及喷涂技术领域,用于解决墙面喷涂质量低、费时费力、机器人不可移动的问题。本技术包括运动系统、视觉系统、喷涂系统和电源系统;所述运动系统包括移动平台、外壳、机械臂和控制柜,用于机器人全向移动;所述视觉系统包括3D相机和相机升降装置,用于自动规划喷涂路径;所述喷涂系统包括喷枪、气泵及料仓,用于喷涂作业;所述电源系统包括电池组和市电两套供电系统,用于供电。本技术具有全向移动能力,能够调用智能决策算法,科学设计喷涂路径,自动化程度高。
技术研发人员:许新建,周建瑜,胡自飞,祝康
受保护的技术使用者:武汉摩鸣科技有限公司
技术研发日:20230508
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!