一种悬臂爬模架体的制作方法
本申请属于建筑,具体为一种悬臂爬模架体。
背景技术:
1、现有的墙面模板仅仅用于构造成浇筑墙体的混凝土的腔室,缺少支撑平台以及人员操作平台,传统做法使用脚手架搭建的方式,但是这种方式在超高层建筑中并不适用。
技术实现思路
1、本申请的目的是针对现有技术的缺点,采用在模板平台的下表面上设置吊平台的方式,设计了一种悬臂爬模架体,解决了目前的外墙面模板无支撑平台以及施工人员无操作平台的问题。
2、为实现上述目的,本申请提供如下技术方案:
3、一种悬臂爬模架体,包括模板平台、锚固连接件,所述模板平台的一端设有与所述锚固连接件配合的第一锚固连接部,所述第一锚固连接部的轴线平行于所述模板平台的表面,所述模板平台的上表面滑动设有模板安装架,所述模板安装架的顶端设有顶平台,所述模板平台的下表面可拆卸连接有吊平台,所述模板安装架的滑动方向与所述第一锚固连接部的轴线平行。
4、优选的,所述模板平台上设有滑动驱动装置,所述滑动驱动装置的执行端与所述模板安装架固定连接。
5、优选的,所述吊平台包括支撑杆、底板,所述模板平台的下表面上朝向所述第一锚固连接部的一侧和背向所述第一锚固连接部的一侧均竖直设置所述支撑杆,所有所述支撑杆背向所述模板平台的一端共同连接所述底板。
6、优选的,所述吊平台上朝向所述第一锚固连接部的一侧的支撑杆上径向设有第二锚固连接部,所述第二锚固连接部的轴线与所述第一锚固连接部的轴线平行。
7、优选的,所述模板安装架上设有模板调节器。
8、优选的,所述模板调节器为伸缩杆,所述伸缩杆的轴线与所述第一锚固连接部的轴线平行。
9、与现有技术相比,本申请的有益效果是:
10、1、本申请采用在模板平台的下表面上设置吊平台的方式,设计了一种悬臂爬模架体,解决了目前的外墙面模板无支撑平台以及施工人员无操作平台的问题。
11、2、本申请通过设置驱动装置来推动模板安装架,从而实现模板的组装和拆卸,其中,滑动驱动装置可以采用气压伸缩杆或液压伸缩杆的方式,推动模板安装架在模板平台上滑动或停止。
12、3、本申请通过设置第二锚固连接部,使得在工人操作时可以通过第二锚固连接部与墙体上的锚固连接件配合,从而避免吊平台晃动。
技术特征:
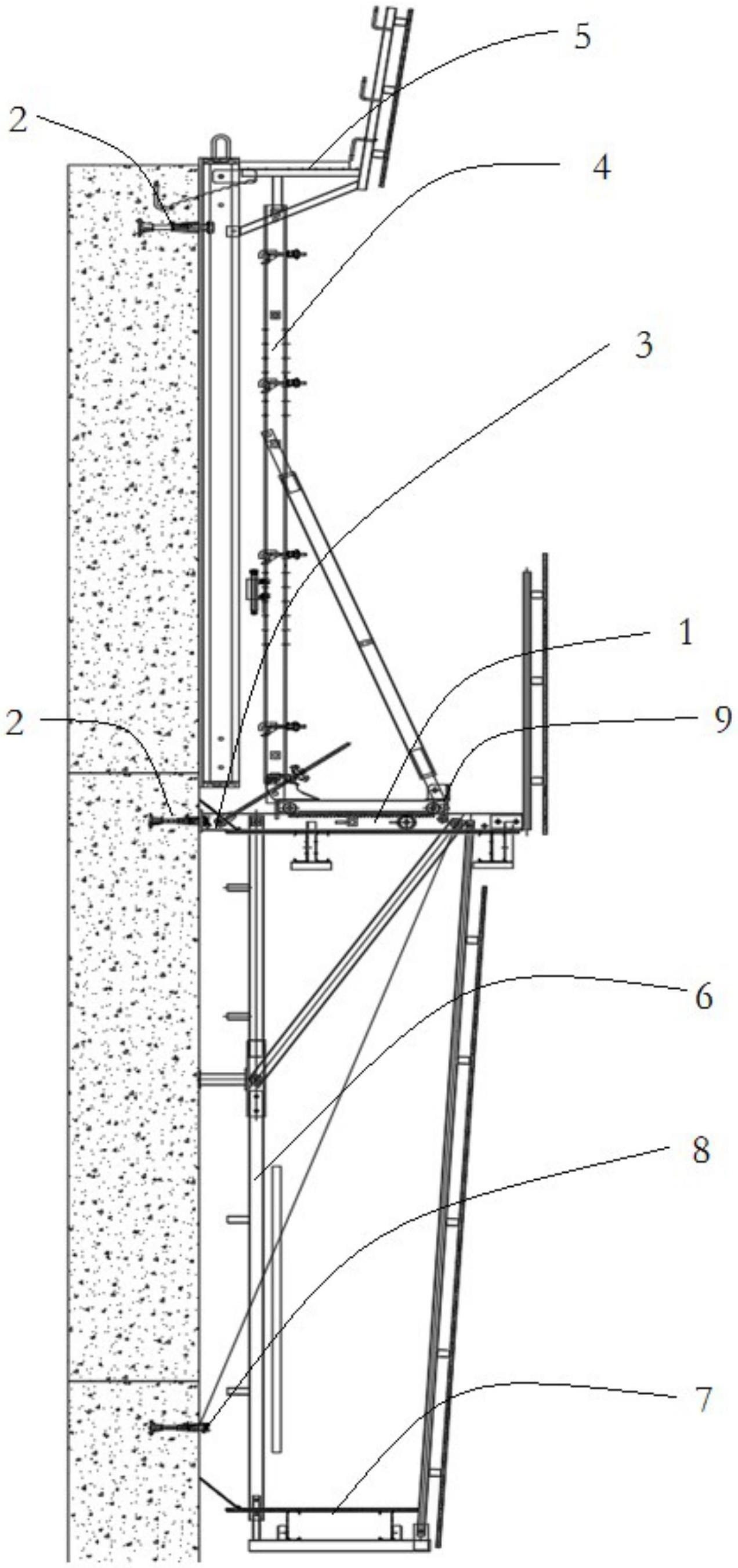
1.一种悬臂爬模架体,其特征在于,包括模板平台(1)、锚固连接件(2),所述模板平台(1)的一端设有与所述锚固连接件(2)配合的第一锚固连接部(3),所述第一锚固连接部(3)的轴线平行于所述模板平台(1)的表面,所述模板平台(1)的上表面滑动设有模板安装架(4),所述模板安装架(4)的顶端设有顶平台(5),所述模板平台(1)的下表面可拆卸连接有吊平台,所述模板安装架(4)的滑动方向与所述第一锚固连接部(3)的轴线平行。
2.根据权利要求1所述的一种悬臂爬模架体,其特征在于,所述模板平台(1)上设有滑动驱动装置,所述滑动驱动装置的执行端与所述模板安装架(4)固定连接。
3.根据权利要求1所述的一种悬臂爬模架体,其特征在于,所述吊平台包括支撑杆(6)、底板(7),所述模板平台(1)的下表面上朝向所述第一锚固连接部(3)的一侧和背向所述第一锚固连接部(3)的一侧均竖直设置所述支撑杆(6),所有所述支撑杆(6)背向所述模板平台(1)的一端共同连接所述底板(7)。
4.根据权利要求3所述的一种悬臂爬模架体,其特征在于,所述吊平台上朝向所述第一锚固连接部(3)的一侧的支撑杆上径向设有第二锚固连接部(8),所述第二锚固连接部(8)的轴线与所述第一锚固连接部(3)的轴线平行。
5.根据权利要求1所述的一种悬臂爬模架体,其特征在于,所述模板安装架(4)上设有模板调节器(9)。
6.根据权利要求5所述的一种悬臂爬模架体,其特征在于,所述模板调节器(9)为伸缩杆,所述伸缩杆的轴线与所述第一锚固连接部(3)的轴线平行。
技术总结
本申请属于建筑技术领域,具体为一种悬臂爬模架体,包括模板平台、锚固连接件,模板平台的一端设有与锚固连接件配合的第一锚固连接部,第一锚固连接部的轴线平行于模板平台的表面,模板平台的上表面滑动设有模板安装架,模板安装架的顶端设有顶平台,模板平台的下表面可拆卸连接有吊平台,模板安装架的滑动方向与第一锚固连接部的轴线平行;本申请采用在模板平台的下表面上设置吊平台的方式,设计了一种悬臂爬模架体,解决了目前的外墙面模板无支撑平台以及施工人员无操作平台的问题。
技术研发人员:刘仁军,周青,陈彬彬,刘建
受保护的技术使用者:苏州拓恒建筑科技有限公司
技术研发日:20230512
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!