一种差速驱动式防水卷材铺贴机器人的制作方法
本技术属于防水施工设备,具体涉及一种差速驱动式防水卷材铺贴机器人。
背景技术:
1、现代建筑防水施工领域,高聚物改性沥青防水卷材类材料占据主导地位。这类材料施工前为卷状包装,施工过程中,需在防水卷材展开的同时,热熔材料表面沥青,压实粘附于防水基层上。
2、目前防水卷材铺贴机械作业过程中,在外界干扰下难以保持沿直线行进,这会导致防水卷材铺贴起褶皱,防水卷材之间搭边宽度不稳定,影响铺贴作业的进行。
技术实现思路
1、本实用新型的主要目的在于提供一种差速驱动式防水卷材铺贴机器人,以解决现有的防水卷材铺贴机械在外界干扰下难以走直线的问题。
2、为解决上述问题,本实用新型所采取的技术方案是:
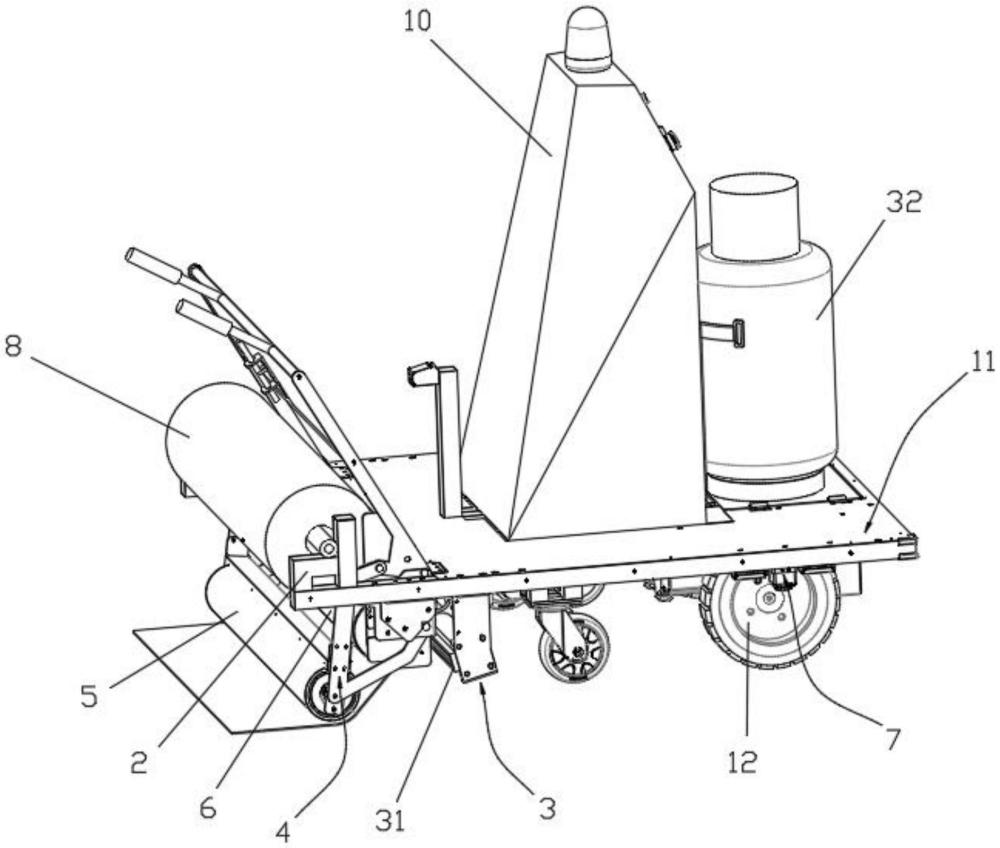
3、一种差速驱动式防水卷材铺贴机器人,包括:
4、车架,所述车架上对称设置至少一对驱动轮,每一所述驱动轮配备一驱动电机;
5、卷材架,设于所述车架前端,用于放置防水卷材;
6、烘烤组件,设于所述车架底部,用于对展开后的防水卷材进行烘烤加热;
7、铺设辊,设于所述车架前端,用于将加热后的防水卷材摊铺在地面上;
8、视觉模块,设于所述车架下方,用于实时采集已铺设的防水卷材上的标示线位置;
9、控制模块,用于根据所述视觉模块采集到的标示线位置控制所述驱动电机的转速,使所述车架回正沿直线行进。
10、一种可能的实施方式中,所述视觉模块包括相机,所述相机内置有中轴线,所述控制模块根据所述相机采集到的标示线与所述中轴线的相对距离,判断所述车架相对于已铺设的防水卷材的偏移量,并根据所述偏移量调整所述驱动电机的转速。
11、一种可能的实施方式中,所述视觉模块外侧设有用于屏蔽外界干扰的遮光罩。
12、一种可能的实施方式中,所述遮光罩包括上罩、下罩和滑轨,所述上罩设于所述视觉模块外侧,所述下罩套设在所述上罩内,并通过所述滑轨与所述上罩连接。
13、一种可能的实施方式中,所述防水卷材铺贴机器人还包括设于所述车架前端的自锁式压紧机构,所述铺设辊转动设置在所述自锁式压紧机构上,且位于所述烘烤组件前方,当所述自锁式压紧机构到达锁止位置时,所述铺设辊将加热后的防水卷材摊铺压紧在地面上。
14、一种可能的实施方式中,所述自锁式压紧机构包括第一连杆、第二连杆、第三连杆和第四连杆,所述第四连杆固定在所述车架上,所述第四连杆的两端分别与第一连杆和第三连杆的一端铰接,所述第二连杆的两端分别与第一连杆和第三连杆的另一端铰接,所述铺设辊转动设置在所述第三连杆上,当所述第一连杆和第二连杆共线时,所述自锁式压紧机构到达锁止位置,所述铺设辊将加热后的防水卷材摊铺压紧在地面上。
15、一种可能的实施方式中,所述第一连杆一侧向上延伸形成施力下压部,用于放大所述第一连杆的转动力矩。
16、一种可能的实施方式中,所述铺设辊和卷材架之间还设有张力辊,展开后的防水卷材经所述张力辊输送至所述铺设辊,所述烘烤组件对所述张力辊和铺设辊之间的防水卷材进行加热。
17、一种可能的实施方式中,所述烘烤组件包括火排和燃料罐,所述火排设于所述铺设辊后方,并通过燃气管路与所述燃料罐连通。
18、一种可能的实施方式中,所述烘烤组件还包括鼓风机,所述鼓风机与所述火排连通,用于向所述火排输送助燃空气。
19、采用上述技术方案所产生的有益效果在于:本实用新型通过在车架上设置视觉模块实时采集已铺设的防水卷材上的标示线位置,控制模块根据标示线位置控制驱动轮对应的驱动电机的转速,使得车架回正沿直线行进,保证了防水卷材铺贴不起褶皱,防水卷材之间的搭边宽度更加均匀稳定。
技术特征:
1.一种差速驱动式防水卷材铺贴机器人,其特征在于,包括:
2.根据权利要求1所述的差速驱动式防水卷材铺贴机器人,其特征在于,所述视觉模块外侧设有用于屏蔽外界干扰的遮光罩。
3.根据权利要求2所述的差速驱动式防水卷材铺贴机器人,其特征在于,所述遮光罩包括上罩、下罩和滑轨,所述上罩设于所述视觉模块外侧,所述下罩套设在所述上罩内,并通过所述滑轨与所述上罩连接。
4.根据权利要求1所述的差速驱动式防水卷材铺贴机器人,其特征在于,所述防水卷材铺贴机器人还包括设于所述车架前端的自锁式压紧机构,所述铺设辊转动设置在所述自锁式压紧机构上,且位于所述烘烤组件前方,当所述自锁式压紧机构到达锁止位置时,所述铺设辊将加热后的防水卷材摊铺压紧在地面上。
5.根据权利要求4所述的差速驱动式防水卷材铺贴机器人,其特征在于,所述自锁式压紧机构包括第一连杆、第二连杆、第三连杆和第四连杆,所述第四连杆固定在所述车架上,所述第四连杆的两端分别与第一连杆和第三连杆的一端铰接,所述第二连杆的两端分别与第一连杆和第三连杆的另一端铰接,所述铺设辊转动设置在所述第三连杆上,当所述第一连杆和第二连杆共线时,所述自锁式压紧机构到达锁止位置,所述铺设辊将加热后的防水卷材摊铺压紧在地面上。
6.根据权利要求5所述的差速驱动式防水卷材铺贴机器人,其特征在于,所述第一连杆一侧向上延伸形成施力下压部,用于放大所述第一连杆的转动力矩。
7.根据权利要求4所述的差速驱动式防水卷材铺贴机器人,其特征在于,所述铺设辊和卷材架之间还设有张力辊,展开后的防水卷材经所述张力辊输送至所述铺设辊,所述烘烤组件对所述张力辊和铺设辊之间的防水卷材进行加热。
8.根据权利要求1所述的差速驱动式防水卷材铺贴机器人,其特征在于,所述烘烤组件包括火排和燃料罐,所述火排设于所述铺设辊后方,并通过燃气管路与所述燃料罐连通。
9.根据权利要求8所述的差速驱动式防水卷材铺贴机器人,其特征在于,所述烘烤组件还包括鼓风机,所述鼓风机与所述火排连通,用于向所述火排输送助燃空气。
技术总结
本技术公开了一种差速驱动式防水卷材铺贴机器人,包括车架,设于车架前端的卷材架和铺设辊,设于车架底部的烘烤组件,设于车架下方用于实时采集已铺设的防水卷材上的标示线位置的视觉模块,以及用于根据视觉模块采集到的标示线位置控制所述驱动电机的转速的控制模块。本技术通过在车架上设置视觉模块实时采集已铺设的防水卷材上的标示线位置,控制模块根据标示线位置控制驱动轮对应的驱动电机的转速,使得车架回正沿直线行进,保证了防水卷材铺贴不起褶皱,防水卷材之间的搭边宽度更加均匀稳定。
技术研发人员:余学庆,王凯,谢金台,熊一凡,陈锦华
受保护的技术使用者:香港智能建造研发中心有限公司
技术研发日:20230607
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!