智能机器人冲毛系统的制作方法
本技术涉及一种智能机器人冲毛系统,属于叠合板冲毛。
背景技术:
1、在混凝土浇筑施工中,为了使新老混凝土能紧密结合,通常要对混凝土结构件的施工缝表面进行冲毛处理。叠合板是常用的混凝土结构件,对其的冲毛处理通常采用人工方式进行,即,工人手抱高压水枪,沿叠合板四边对侧壁进行冲毛。冲毛中的高压水射流可以达到一个冲蚀的作用,使混凝土表面的乳化皮层迅速剥落形成粗砂状,从而达到能够使新老混凝土紧密结合的表面处理要求。但是,人工方式的冲毛处理显然存在劳动强度大、工作效率低、冲毛质量无法保证等缺点,有待改善。
技术实现思路
1、本实用新型的目的在于提供一种智能机器人冲毛系统,其解决了现有技术因人工方式冲毛带来的劳动强度大、工作效率低、冲毛质量无法保证等问题。
2、为了实现上述目的,本实用新型采用了以下技术方案:
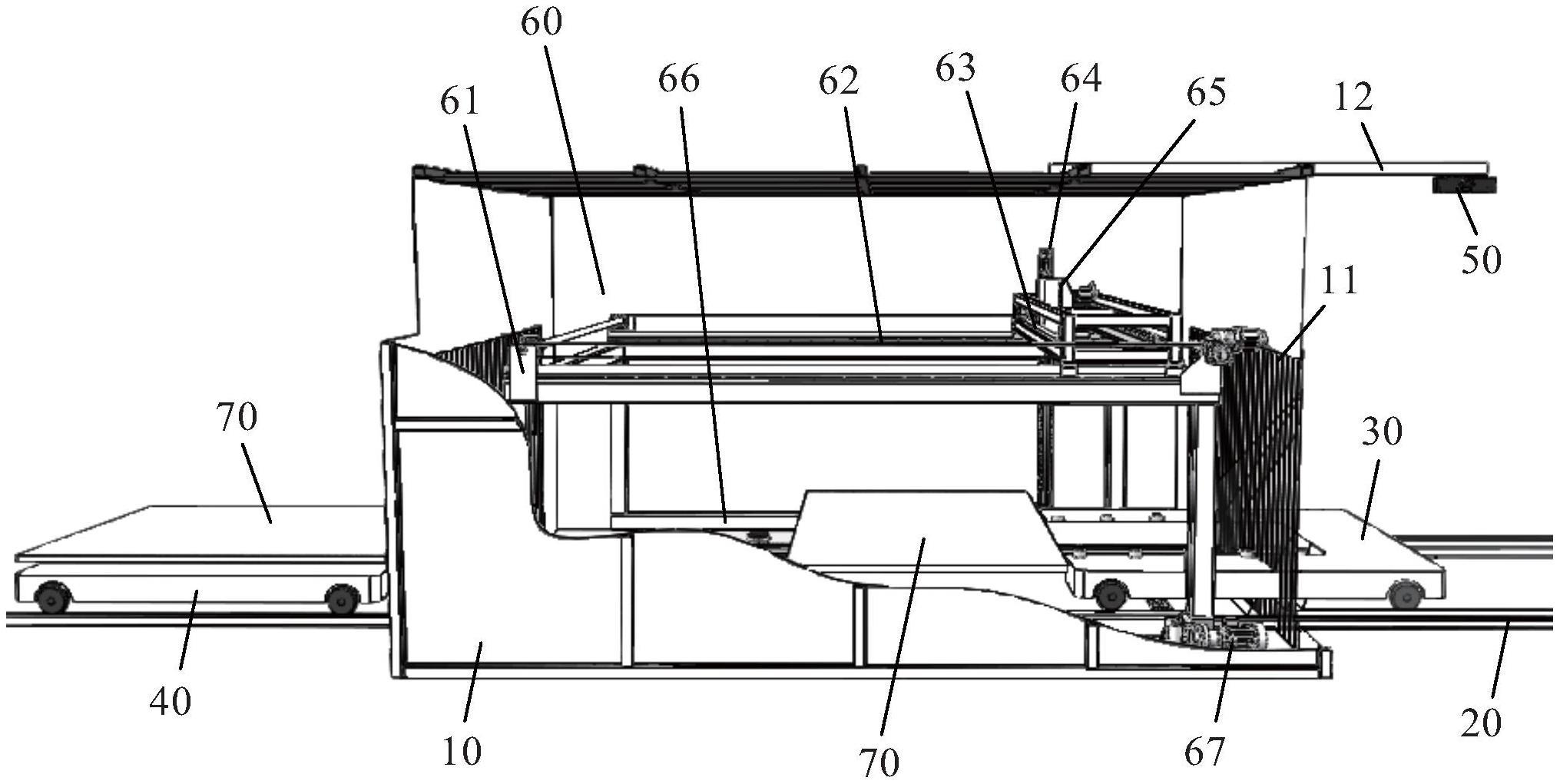
3、一种智能机器人冲毛系统,包括罩棚,所述罩棚的进口与出口之间贯穿铺设有直线轨道且所述直线轨道延伸出所述罩棚设置,所述罩棚内设有高压水冲毛机构,所述罩棚的进口上方安装有3d视觉采集装置,处于所述罩棚进口位置的所述直线轨道上可移动地设有进料车,处于所述罩棚出口位置的所述直线轨道上可移动地设有出料车,所述高压水冲毛机构、所述3d视觉采集装置、所述进料车和所述出料车与plc控制器连接,所述plc控制器和所述3d视觉采集装置与工控机连接。
4、本实用新型的优点是:
5、本实用新型无需工人操作,全程自动化对叠合板四边侧壁实现冲毛处理,冲毛质量有保障,工作效率高,降低工伤,降低成本。
技术特征:
1.一种智能机器人冲毛系统,其特征在于,包括罩棚,所述罩棚的进口与出口之间贯穿铺设有直线轨道且所述直线轨道延伸出所述罩棚设置,所述罩棚内设有高压水冲毛机构,所述罩棚的进口上方安装有3d视觉采集装置,处于所述罩棚进口位置的所述直线轨道上可移动地设有进料车,处于所述罩棚出口位置的所述直线轨道上可移动地设有出料车,所述高压水冲毛机构、所述3d视觉采集装置、所述进料车和所述出料车与plc控制器连接,所述plc控制器和所述3d视觉采集装置与工控机连接。
2.如权利要求1所述的智能机器人冲毛系统,其特征在于,所述高压水冲毛机构包括桁架机械手,高压水枪安装于所述桁架机械手上,所述高压水枪在所述桁架机械手上能够实现三维移动及摆动,所述高压水枪与高压水泵相连通,其中:所述桁架机械手的下部设有用于放置叠合板进行冲毛作业的冲毛平台。
3.如权利要求2所述的智能机器人冲毛系统,其特征在于,所述桁架机械手包括框架,所述框架上沿所述直线轨道长度方向设有纵向导轨,所述纵向导轨上可滑移地设有横向导轨,所述横向导轨沿与所述直线轨道长度方向垂直的方向设置,所述横向导轨上可滑移地设有垂直导轨,所述垂直导轨沿上下方向设置,所述垂直导轨上可滑移地设有所述高压水枪,所述高压水枪沿所述横向导轨方向可摆动。
4.如权利要求3所述的智能机器人冲毛系统,其特征在于,所述冲毛平台由安装于所述框架的下部的两个横梁构成。
5.如权利要求2所述的智能机器人冲毛系统,其特征在于,所述进料车包括u形车架,所述车架的底部安装有可控滚轮,所述车架的顶部设有用于顶起叠合板的多个顶升机构以及用于检测叠合板是否放置于所述进料车上的板料到位检测器件,所述车架的开口朝向所述桁架机械手设置,所述开口的宽度大于所述冲毛平台的宽度,所述车架朝向所述桁架机械手的前部设有用于检测所述进料车是否到达卸料位置的卸料到位检测器件,其中:各所述顶升机构在所述车架的开口位置对称设置。
6.如权利要求2所述的智能机器人冲毛系统,其特征在于,所述出料车包括u形车架,所述车架的底部安装有可控滚轮,所述车架的顶部设有用于顶起叠合板的多个顶升机构以及用于检测叠合板是否放置于所述出料车上的板料到位检测器件,所述车架的开口朝向所述桁架机械手设置,所述开口的宽度大于所述冲毛平台的宽度,所述车架朝向所述桁架机械手的前部设有用于检测所述出料车是否到达装料位置的装料到位检测器件,其中:各所述顶升机构在所述车架的开口位置对称设置。
7.如权利要求1至6中任一项所述的智能机器人冲毛系统,其特征在于,所述直线轨道上安装有用于检测所述进料车是否移动到初始位置的初始到位检测器件、用于检测所述进料车是否移动到采集位置的采集到位检测器件、用于检测所述出料车是否移动到下料位置的移出到位检测器件,其中,所述采集到位检测器件位于所述3d视觉采集装置的下方,所述初始到位检测器件位于所述罩棚外远离进口的位置,所述移出到位检测器件位于所述罩棚外远离出口的位置。
8.如权利要求1所述的智能机器人冲毛系统,其特征在于,所述罩棚的进口和出口安装有防尘帘,用于使所述罩棚形成封闭空间,避免冲毛作业产生的粉尘扩散。
技术总结
本技术公开了一种智能机器人冲毛系统,包括罩棚,罩棚的进口与出口之间贯穿铺设有直线轨道且直线轨道延伸出罩棚设置,罩棚内设有高压水冲毛机构,罩棚的进口上方安装有3D视觉采集装置,处于罩棚进口位置的直线轨道上可移动地设有进料车,处于罩棚出口位置的直线轨道上可移动地设有出料车,高压水冲毛机构、3D视觉采集装置、进料车和出料车与PLC控制器连接,PLC控制器和3D视觉采集装置与工控机连接。本技术解决了现有技术因人工方式冲毛带来的劳动强度大、工作效率低、冲毛质量无法保证等问题。
技术研发人员:王雷亮,王玉雷,李久会,王小川
受保护的技术使用者:河北榆构建材有限公司
技术研发日:20230616
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!