一种抹灰机器人的行走装置的制作方法
本技术涉及工程机械设备,尤其涉及一种抹灰机器人的行走装置。
背景技术:
1、在建筑技术领域,涂抹是一种将涂料涂覆于墙面,使涂料牢固附着于墙面而形成光洁平整表面的加工工艺。传统的涂抹工作,主要由人工承担,工作负担很重。特别是抹灰工作,需经多次涂抹与刮平,其步骤繁复而效率很低。且人工加工精度依赖于工人的经验,造成墙面精度难以保证。着自动化技术的发展,也出现了一些自动抹灰机器人,用于使工人摆脱繁重的劳动枷锁。
2、但是现有的抹灰机器人行走机构较为简单,行走机构上缺少一定的安装调节结构,从而影响行走机构的安装使用效率。
技术实现思路
1、本实用新型的目的是为了解决现有技术中抹灰机器人行走机构较为简单,行走机构上缺少一定安装调节结构的问题,而提出的一种抹灰机器人的行走装置。
2、为了实现上述目的,本实用新型采用了如下技术方案:
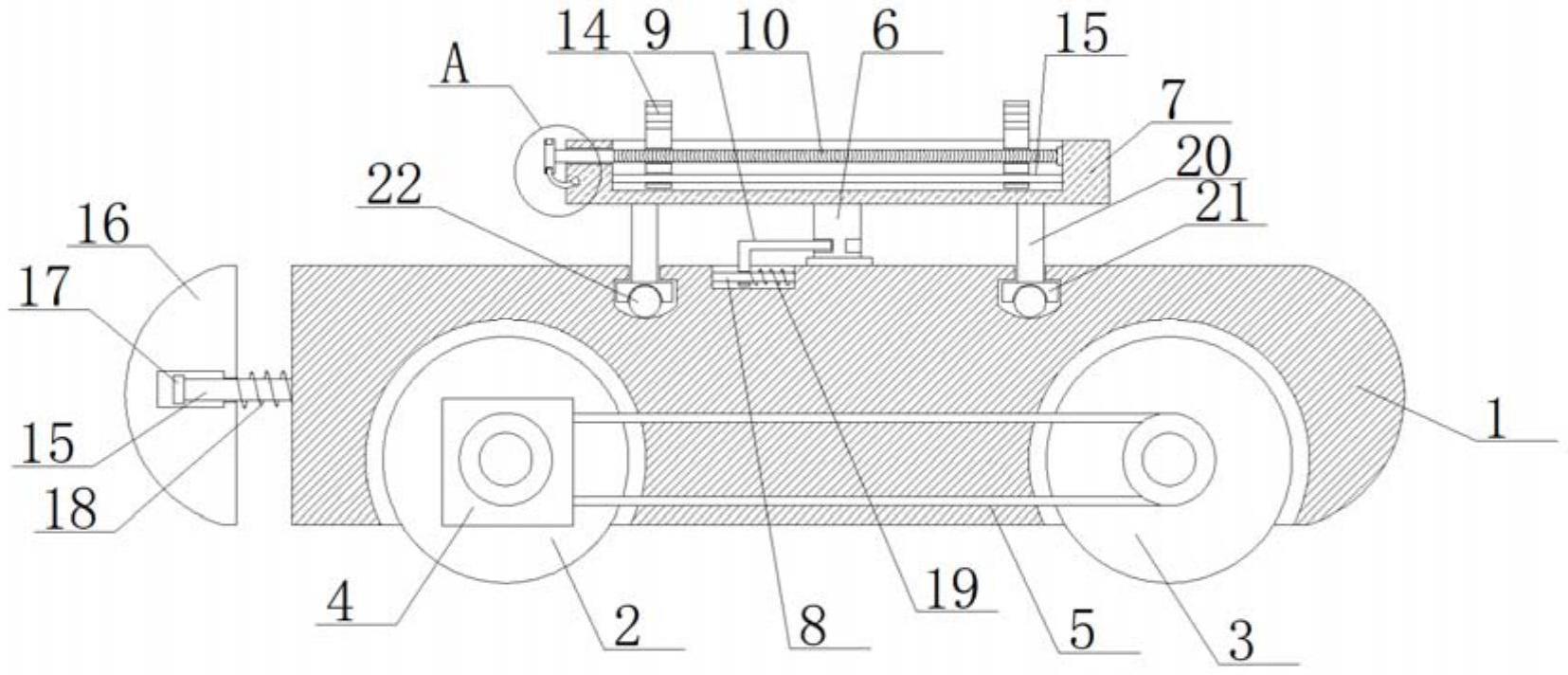
3、一种抹灰机器人的行走装置,包括底座,所述底座的底部分别转动连接有主动轮和从动轮,所述底座的上固定连接有与主动轮对应的驱动电机,所述主动轮和从动轮之间通过传动皮带连接,所述底座的顶部通过转杆转动连接有安装板,所述底座的顶部设有固定槽,所述固定槽内固定连接有固定杆,所述固定杆上滑动套接有l型卡杆,所述转杆上环绕设有与l型卡杆对应的多个卡槽,所述安装板的顶部设有安装槽,所述安装槽内转动连接有螺杆,所述螺杆的一端固定连接有旋钮,所述安装板的外壁上通过销轴转动连接有弧形插杆,所述旋钮上环绕设有与弧形插杆对应的多个插槽,所述螺杆位于安装槽内的一端螺纹套接有对称设置的两个锁紧块,所述锁紧块上设有锁紧口。
4、优选地,所述底座靠近主动轮的一端通过导杆滑动连接有缓冲板,所述缓冲板上设有与导杆对应的滑腔,所述导杆位于滑腔内的一端固定连接有限位块,所述导杆上套设有第一弹簧,所述第一弹簧的两端分别与缓冲板和底座固定连接。
5、优选地,所述固定杆上套设有第二弹簧,所述第二弹簧的两端分别与l型卡杆和固定槽内壁固定连接。
6、优选地,所述安装板的底部固定连接有对称设置的多个支撑杆,所述支撑杆的底部固定连接有支撑块,所述底座的顶部设有与支撑块对应的环形滑轨,所述环形滑轨内滑动连接有多个滚珠,所述滚珠的边缘与支撑块相接触。
7、优选地,所述安装槽内固定连接有横杆,所述锁紧块上设有与横杆对应的贯穿口。
8、优选地,所述销轴上套设有扭力弹簧,所述扭力弹簧的两端分别与弧形插杆和安装板固定连接。
9、有益效果:
10、1.通过转动转杆带动安装板转动,调节安装板的方向,然后利用l型卡杆固定住转杆,通过转动旋钮带动螺杆转动,可以调节两个锁紧块之间的距离,方便对涂抹机构进行固定安装,弧形插杆可以有效对旋钮进行固定,本实用新型中通过安装调节机构的设置,使行走机构可以根据涂抹机构的需要进行相应的调节,从而有效提升了行走机构的安装使用效率;
11、2.驱动电机可以通过传动皮带带动从动轮转动,实现行走装置的移动,同时缓冲板可以起到防撞缓冲作用,同时支撑杆、支撑块的设置,可以防止安装板的晃动。
技术特征:
1.一种抹灰机器人的行走装置,包括底座(1),其特征在于:所述底座(1)的底部分别转动连接有主动轮(2)和从动轮(3),所述底座(1)的上固定连接有与主动轮(2)对应的驱动电机(4),所述主动轮(2)和从动轮(3)之间通过传动皮带(5)连接,所述底座(1)的顶部通过转杆(6)转动连接有安装板(7),所述底座(1)的顶部设有固定槽,所述固定槽内固定连接有固定杆(8),所述固定杆(8)上滑动套接有l型卡杆(9),所述转杆(6)上环绕设有与l型卡杆(9)对应的多个卡槽,所述安装板(7)的顶部设有安装槽,所述安装槽内转动连接有螺杆(10),所述螺杆(10)的一端固定连接有旋钮(11),所述安装板(7)的外壁上通过销轴(12)转动连接有弧形插杆(13),所述旋钮(11)上环绕设有与弧形插杆(13)对应的多个插槽,所述螺杆(10)位于安装槽内的一端螺纹套接有对称设置的两个锁紧块(14),所述锁紧块(14)上设有锁紧口。
2.根据权利要求1所述的一种抹灰机器人的行走装置,其特征在于:所述底座(1)靠近主动轮(2)的一端通过导杆(15)滑动连接有缓冲板(16),所述缓冲板(16)上设有与导杆(15)对应的滑腔,所述导杆(15)位于滑腔内的一端固定连接有限位块(17),所述导杆(15)上套设有第一弹簧(18),所述第一弹簧(18)的两端分别与缓冲板(16)和底座(1)固定连接。
3.根据权利要求1所述的一种抹灰机器人的行走装置,其特征在于:所述固定杆(8)上套设有第二弹簧(19),所述第二弹簧(19)的两端分别与l型卡杆(9)和固定槽内壁固定连接。
4.根据权利要求1所述的一种抹灰机器人的行走装置,其特征在于:所述安装板(7)的底部固定连接有对称设置的多个支撑杆(20),所述支撑杆(20)的底部固定连接有支撑块(21),所述底座(1)的顶部设有与支撑块(21)对应的环形滑轨,所述环形滑轨内滑动连接有多个滚珠(22),所述滚珠(22)的边缘与支撑块(21)相接触。
5.根据权利要求1所述的一种抹灰机器人的行走装置,其特征在于:所述安装槽内固定连接有横杆(23),所述锁紧块(14)上设有与横杆(23)对应的贯穿口。
6.根据权利要求1所述的一种抹灰机器人的行走装置,其特征在于:所述销轴(12)上套设有扭力弹簧,所述扭力弹簧的两端分别与弧形插杆(13)和安装板(7)固定连接。
技术总结
本技术公开了一种抹灰机器人的行走装置,包括底座,所述底座的底部分别转动连接有主动轮和从动轮,所述底座的上固定连接有与主动轮对应的驱动电机,所述主动轮和从动轮之间通过传动皮带连接,所述底座的顶部通过转杆转动连接有安装板,所述底座的顶部设有固定槽,所述固定槽内固定连接有固定杆,所述固定杆上滑动套接有L型卡杆,所述转杆上环绕设有与L型卡杆对应的多个卡槽,所述安装板的顶部设有安装槽,所述安装槽内转动连接有螺杆,所述螺杆的一端固定连接有旋钮。本技术中通过安装调节机构的设置,使行走机构可以根据涂抹机构的需要进行相应的调节,从而有效提升了行走机构的安装使用效率。
技术研发人员:朱龙祥,韩国军,安胜强,张金来,汪玉玲,王瑞芳,郭亮鹏,唐玉玺
受保护的技术使用者:甘肃建投装备制造有限公司
技术研发日:20230621
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!