水池机器人的制作方法
本技术实施例涉及机器人领域,具体而言,涉及一种水池机器人。
背景技术:
1、近年来,随着信息化技术的快速发展,水池机器人能够在水下进行工作,例如自动完成水池的清洁工作,为水池提供便利,广受用户青睐。
2、由于水池机器人的工作环境处于水中,而工作人员无法在水中控制水池机器人进入工作状态,相关技术中只能将水池机器人由工作人员在岸上控制水池机器人进入工作状态,再将水池机器人放入水中,达到水池机器人在水中工作的目的。但是在岸上开机后,水池机器人会有一段时间在岸上运行工作程序,水池机器人在岸上进行工作会造成不必要的电源浪费,甚至水池和岸上不同的运行环境,在岸上运行工作程序可能会影响水池机器人的性能。因此,相关技术中存在无法在水中控制水池机器人的工作状态导致影响水池机器人的性能的问题。
3、针对相关技术中存在的无法在水中控制水池机器人的工作状态导致影响水池机器人的性能的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本实用新型实施例提供了一种水池机器人,以至少解决相关技术中存在的无法在水中控制水池机器人的工作状态导致影响水池机器人的性能的问题。
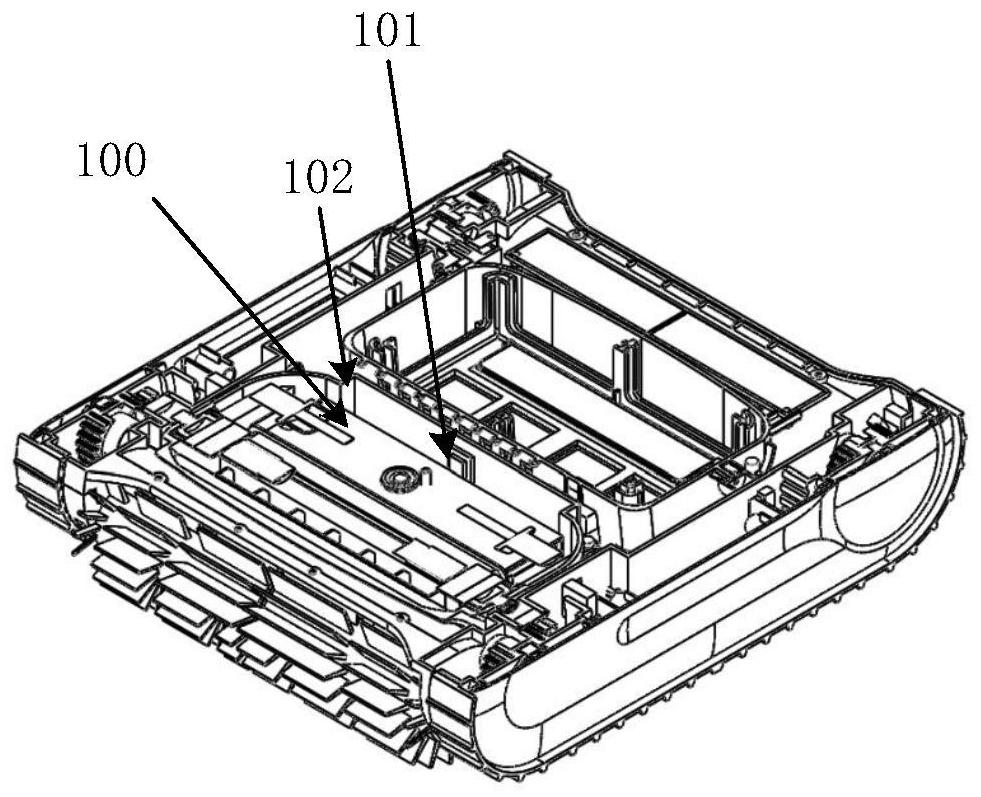
2、根据本实用新型的一个实施例,提供了一种水池机器人,包括:控制盒、液位传感器,其中,
3、所述控制盒,用于对所述水池机器人执行控制;
4、所述液位传感器被设置在所述控制盒内部,所述水池机器人根据所述液位传感器的信息控制所述控制盒的开关状态。
5、在一个示例性实施例中,所述控制盒包括:执行电路、驱动芯片,其中,所述驱动芯片的输入端与所述液位传感器连接,所述驱动芯片的输出端与所述执行电路连接。
6、在一个示例性实施例中,所述驱动芯片的输入端为使能端,其中,所述使能端在为目标电平的情况下,控制所述驱动芯片的输出端向所述执行电路发送目标信号。
7、在一个示例性实施例中,所述控制盒包括壳体,所述液位传感器附着在所述控制盒的壳体的内侧。
8、在一个示例性实施例中,所述水池机器人还包括:外壳,其中,所述外壳上有开关键。
9、在一个示例性实施例中,所述开关键与所述液位传感器连接,其中,所述开关键用于控制所述液位传感器的开关状态。
10、在一个示例性实施例中,所述水池机器人还包括:计时器,其中,所述计时器与所述开关键连接,所述开关键用于控制计时器的开关状态,所述计时器与所述驱动芯片的输入端连接。
11、在一个示例性实施例中,所述水池机器人还包括:提示装置,其中,所述液位传感器与所述提示装置连接,所述开关键与所述提示装置连接,所述液位传感器与所述开关键控制所述提示装置发出提示信息。
12、在一个示例性实施例中,所述水池机器人还包括:计时器,其中,所述开关键分别与所述计时器、所述液位传感器连接,所述开关键用于控制所述计时器和所述液位传感器的开关状态,所述计时器与所述驱动芯片的输入端连接。
13、在一个示例性实施例中,所述液位传感器为非接触式液位传感器。
14、通过本实用新型,通过在控制盒内部设置一个液位传感器,感知水池机器人在水中的位置,在水池机器人在水中所在的液位到达预设感应值时,能够控制控制盒开启,即控制盒的状态由关闭状态变为开启状态,控制盒在开启状态对水池机器人进行控制,从而,使水池机器人有序的完成各项工作,从而使机器人可以在水下控制水池机器人的工作状态,解决了相关技术中存在的无法在水中控制水池机器人的工作状态导致影响水池机器人的性能的问题,达到了保证水池机器人性能以及节省电源的效果。
技术特征:
1.一种水池机器人,其特征在于,包括控制盒、液位传感器,其中,
2.根据权利要求1所述的水池机器人,其特征在于,所述控制盒包括:执行电路、驱动芯片,其中,
3.根据权利要求2所述的机器人,其特征在于,
4.根据权利要求1所述的水池机器人,其特征在于,所述控制盒包括壳体,所述液位传感器附着在所述控制盒的壳体的内侧。
5.根据权利要求2所述的水池机器人,其特征在于,所述水池机器人还包括:
6.根据权利要求5所述的水池机器人,其特征在于,
7.根据权利要求5所述的水池机器人,其特征在于,所述水池机器人还包括:
8.根据权利要求7所述的水池机器人,其特征在于,所述水池机器人还包括:
9.根据权利要求5所述的水池机器人,其特征在于,所述水池机器人还包括:
10.根据权利要求1-9中任一项所述的水池机器人,其特征在于,所述液位传感器为非接触式液位传感器。
技术总结
本技术实施例提供了一种水池机器人,其中,该水池机器人包括:控制盒,用于对水池机器人执行控制;液位传感器被设置在控制盒内部,水池机器人根据液位传感器的信息控制控制盒的开关状态。通过本技术实施例,解决了相关技术中存在的无法在水中控制水池机器人的工作状态导致影响水池机器人的性能的问题。
技术研发人员:张石磊
受保护的技术使用者:星迈创新科技(苏州)有限公司
技术研发日:20230626
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!