一种钢筋绑扎机器人的制作方法
本技术属于建筑机器人,尤其涉及一种钢筋绑扎机器人。
背景技术:
1、钢筋绑扎目前主要采用的方式是人工手动捆扎和小型手持式钢筋捆扎机,其中人工手动捆扎费事费力,效率低下,而另一种小型手持式钢筋捆扎机,又叫全自动钢筋捆扎机,内部设有微控制器,能够自动完成钢筋捆扎的所有步骤,是一种智能化手持式钢筋快速捆扎工具,钢筋捆扎机主要由机体、专用线盘、电池盒和充电器四部分组成。
2、楼板钢筋不同于传统钢筋,通常需要较长的钢丝进行捆扎,并且现有的钢筋自动捆扎机器人还存在较为大型,不易搬运的问题,在对楼板的钢筋捆扎时,现有的装置并不适用。为此,亟需一种钢筋自动捆扎机器人解决以上问题。
技术实现思路
1、本实用新型的目的是提供一种钢筋绑扎机器人,以解决上述问题,达到弥补现有技术的不足的目的。
2、为实现上述目的,本实用新型提供了如下方案:
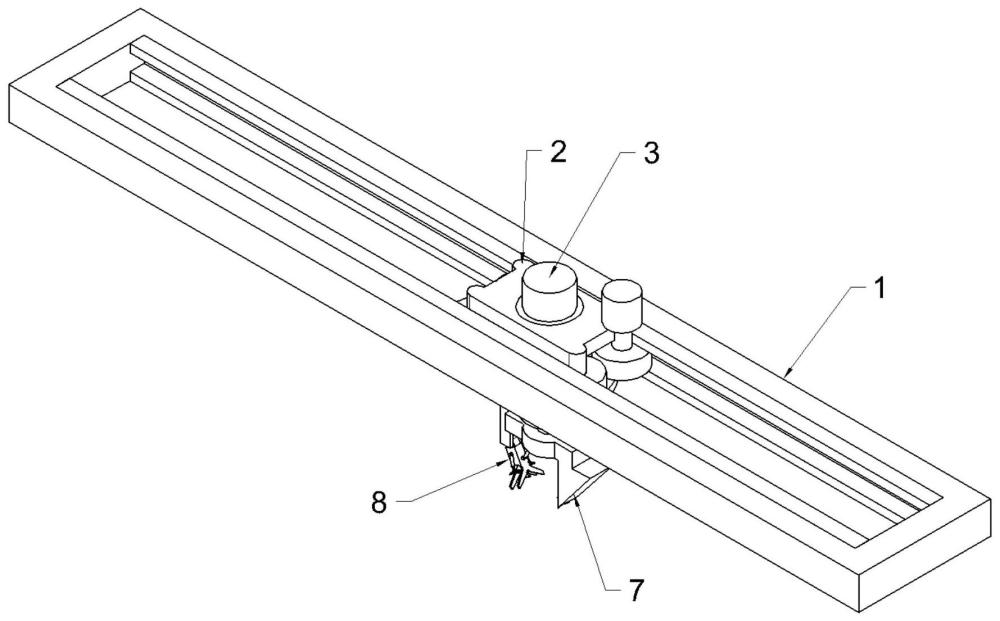
3、一种钢筋绑扎机器人,包括:固定框,所述固定框内侧水平滑动连接有步行机构步进机构,所述步行机构步进机构中部固定连接有第一伸缩气缸,所述第一伸缩气缸的轴线与所述步行机构步进机构垂直,所述第一伸缩气缸底端轴接有固定座,所述固定座底端固定连接有旋转电机,所述旋转电机的轴线与所述步行机构步进机构垂直,所述旋转电机输出轴朝下且底端轴接有安装座,所述安装座两端分别设有钢筋弹出结构出丝结构、磁性夹持结构。
4、优选的,所述步行机构步进机构包括移动座,所述移动座水平设置,所述第一伸缩气缸与所述移动座中部固定连接,所述移动座底部四角分别转动连接有滚轮,所述滚轮的轴线垂直于所述移动座,所述固定框内侧开设有滑槽,所述滚轮与所述滑槽滚动连接,所述移动座顶端固定连接有滚轮电机,所述滚轮电机与其中一个所述滚轮轴接。
5、优选的,钢筋弹出结构出丝结构包括储存盒,所述储存盒顶端与所述安装座底端固定连接,所述储存盒底端靠近所述磁性夹持结构的一侧开设有两个弹出口,所述弹出口外侧固定连接有两个弧形板,两个所述弧形板分别与对应的所述弹出口同轴设置,所述储存盒底端设有弹出夹持部,所述弹出夹持部底端与两个所述弧形板相匹配。
6、优选的,所述弹出夹持部包括对接凸板,所述对接凸板底端靠近所述弧形板的一端设有两个凸起,所述凸起与对应的所述弧形板相匹配,所述对接凸板顶端轴接有压紧电机,所述压紧电机远离所述对接凸板的一端与所述储存盒固定连接。
7、优选的,所述磁性夹持结构包括夹持臂,所述夹持臂顶端与所述安装座转动连接,所述夹持臂靠近所述钢筋弹出结构出丝结构的一侧转动连接有第二伸缩气缸的一端,所述第二伸缩气缸远离所述夹持臂的一端与所述安装座底端转动连接,所述夹持臂底端固定连接有两个磁性辅助结构,两个所述磁性辅助结构相互平行,两个所述磁性辅助结构之间设有夹持固定部,所述夹持固定部与所述夹持臂连接。
8、优选的,所述夹持固定部包括两个对称设置的旋转夹头,所述旋转夹头设于两个所述磁性辅助结构之间,所述旋转夹头顶端与所述夹持臂转动连接,所述旋转夹头的一侧固定连接有凸板,所述凸板顶端转动连接有第三伸缩气缸的一端,所述第三伸缩气缸远离所述凸板的一端与所述夹持臂转动连接。
9、优选的,所述磁性辅助结构包括v型辅助支臂,所述v型辅助支臂顶端与所述夹持臂底端固定连接,所述v型辅助支臂靠近所述夹持臂的一端固定连接有永磁铁,所述永磁铁与所述旋转夹头底端相对应。
10、与现有技术相比,本实用新型具有如下优点和技术效果:
11、使用时,步进机构可以沿着固定框进行移动,从而沿着一个长度方向进行快速绑扎工作,而第一伸缩气缸可以推动固定座向上向下运动,从而让出丝结构、磁性夹持结构能够对准需要捆扎的位置,挡对准后,出丝结构弹出弯折成弧形的钢筋,钢筋再被磁性夹持结构夹持,从而实现固定,此时安装座被上方的旋转电机带动进行旋转,而第一伸缩气缸在旋转时也略微向下运动,从而使得钢筋能够被有效地捆扎到指定的位置。通过设置磁性夹持结构可以更好地接收来自出丝结构的钢筋。
12、利用这些结构,实现了一种能够快速方便地对楼板进行捆扎,并且具有良好捆扎效率的钢筋绑扎机器人。
技术特征:
1.一种钢筋绑扎机器人,其特征在于,包括:固定框(1),所述固定框(1)内侧水平滑动连接有步进机构(2),所述步进机构(2)中部固定连接有第一伸缩气缸(3),所述第一伸缩气缸(3)的轴线与所述步进机构(2)垂直,所述第一伸缩气缸(3)底端轴接有固定座(4),所述固定座(4)底端固定连接有旋转电机(5),所述旋转电机(5)的轴线与所述步进机构(2)垂直,所述旋转电机(5)输出轴朝下且轴接有安装座(6),所述安装座(6)两端分别设有出丝结构(7)、磁性夹持结构(8)。
2.根据权利要求1所述的一种钢筋绑扎机器人,其特征在于,所述步进机构(2)包括移动座(201),所述第一伸缩气缸(3)与所述移动座(201)中部固定连接,所述移动座(201)底部四角分别转动连接有滚轮(202),所述滚轮(202)的轴线垂直于所述移动座(201),所述固定框(1)内侧开设有滑槽,所述滚轮(202)与所述滑槽滚动连接,所述移动座(201)顶端固定连接有滚轮电机(203),所述滚轮电机(203)与其中一个所述滚轮(202)轴接。
3.根据权利要求2所述的一种钢筋绑扎机器人,其特征在于,出丝结构(7)包括储存盒(701),所述储存盒(701)顶端与所述安装座(6)底端固定连接,所述储存盒(701)底端靠近所述磁性夹持结构(8)的一侧开设有两个弹出口(702),所述弹出口(702)外侧固定连接有弧形板(703),所述储存盒(701)底端设有弹出夹持部,所述弹出夹持部底端与两个所述弧形板(703)相匹配。
4.根据权利要求3所述的一种钢筋绑扎机器人,其特征在于,所述弹出夹持部包括对接凸板(704),所述对接凸板(704)靠近所述弧形板(703)的一端设有两个凸起,所述凸起与对应的所述弧形板(703)相匹配,所述对接凸板(704)顶端轴接有压紧电机(705),所述压紧电机(705)远离所述对接凸板(704)的一端与所述储存盒(701)固定连接。
5.根据权利要求1所述的一种钢筋绑扎机器人,其特征在于,所述磁性夹持结构(8)包括夹持臂(801),所述夹持臂(801)顶端与所述安装座(6)转动连接,所述夹持臂(801)靠近所述出丝结构(7)的一侧转动连接有第二伸缩气缸(802)的一端,所述第二伸缩气缸(802)远离所述夹持臂(801)的一端与所述安装座(6)底端转动连接,所述夹持臂(801)底端固定连接有两个磁性辅助结构,两个所述磁性辅助结构相互平行,两个所述磁性辅助结构之间设有夹持固定部,所述夹持固定部与所述夹持臂(801)连接。
6.根据权利要求5所述的一种钢筋绑扎机器人,其特征在于,所述夹持固定部包括两个对称设置的旋转夹头(807),所述旋转夹头(807)设于两个所述磁性辅助结构之间,所述旋转夹头(807)顶端与所述夹持臂(801)转动连接,所述旋转夹头(807)的一侧固定连接有凸板(806),所述凸板(806)顶端转动连接有第三伸缩气缸(805)的一端,所述第三伸缩气缸(805)远离所述凸板(806)的一端与所述夹持臂(801)转动连接。
7.根据权利要求6所述的一种钢筋绑扎机器人,其特征在于,所述磁性辅助结构包括v型辅助支臂(803),所述v型辅助支臂(803)顶端与所述夹持臂(801)底端固定连接,所述v型辅助支臂(803)靠近所述夹持臂(801)的一端固定连接有永磁铁(804),所述永磁铁(804)与所述旋转夹头(807)底端相对应。
技术总结
本技术属于建筑机器人技术领域,尤其涉及一种钢筋绑扎机器人,包括:固定框,所述固定框内侧水平滑动连接有步进机构,所述步进机构中部固定连接有第一伸缩气缸,所述第一伸缩气缸的轴线与所述步进机构垂直,所述第一伸缩气缸底端轴接有固定座,所述固定座底端固定连接有旋转电机,所述旋转电机的轴线与所述步进机构垂直,所述旋转电机底端轴接有安装座,所述安装座两端分别设有出丝结构、磁性夹持结构。利用这些结构,实现了一种能够快速方便地对楼板进行捆扎,并且具有良好捆扎效率的钢筋绑扎机器人。
技术研发人员:缪长江,韩孝军
受保护的技术使用者:北京汇研中科科技发展有限公司
技术研发日:20230914
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!