一种建筑工程智能化自动梯的制作方法
1.本实用新型属于建筑工程技术领域,具体为一种建筑工程智能化自动梯。
背景技术:
2.建筑工程用的梯子是辅助工人登高作业的,目前的工程梯都是人字形的的梯子,在使用后,需要工人下来,然后移动工程梯,过程中,工人需要不断上下以及搬运梯子,使用非常不方便,因此,本申请提出了一种建筑工程智能化自动梯,用于解决上述问题。
技术实现要素:
3.本实用新型的目的在于解决背景技术中的问题,提供一种建筑工程智能化自动梯。
4.本实用新型采用的技术方案如下:
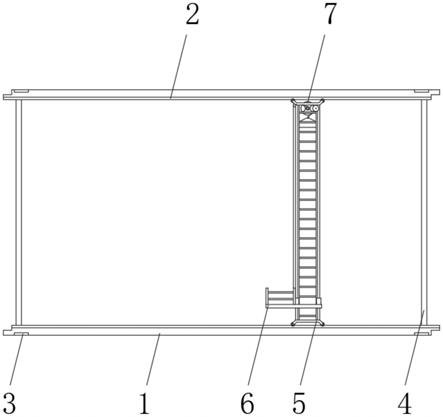
5.一种建筑工程智能化自动梯,包括两根横杆、水平轨道、底端横板、支撑杆、移动梯、升降平台和驱动机构,所述水平轨道设置在横杆的表面,所述底端横板设置在横杆的两端,所述支撑杆设置在两根横杆之间,所述移动梯设置在水平轨道上,且可以在水平轨道上延轨道方向自由滑动,所述升降平台设置在移动梯的表面,且可以在移动梯的表面沿竖直方向自由滑动,所述驱动机构设置在移动梯的顶端,升降平台通过钢丝与驱动机构动力连接。
6.优选的,所述移动梯包括梯架,所述梯架的内测卡接有若干加强杆,所述梯架的正面两侧设有竖直轨道,所述梯架的顶端和底端安装有驱动轮,所述驱动轮通过电机驱动,且可以在水平轨道上自由滚动。
7.优选的,所述升降平台包括平台板,所述平台板的背面靠近竖直轨道的位置焊接有移动块,移动块可与竖直轨道相互咬合,且可以在竖直轨道上沿竖直方向自由滑动,所述平台板的顶面焊接有防护栏。
8.优选的,所述驱动机构包括转动轮,所述转动轮的一侧通过齿轮动力连接有驱动电机,所述转动轮远离驱动电机的一侧设有导向轮,所述导向轮通过转轴安装在移动梯上,所述转动轮的底面通过钢丝连接有平衡块。
9.优选的,所述平衡块可以在移动梯的背面沿竖直方向自由滑动。
10.优选的,所述转动轮的圆心位置设有收集轮,收集轮通过钢丝与升降平台连接,所述转动轮通过钢丝与平衡块连接。
11.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
12.1、本实用新型中,横杆的长度可以增加,梯架通过驱动轮可以在横杆上的竖直轨道上自由滑动,保证梯架可以延水平方向自由移动,无需人工推动,自动化程度高,方便使用。
13.2、本实用新型中,驱动电机可以将动力输送至转动轮,转动轮带动收集轮转动,转动的收集轮可以通过钢丝拉动升降平台,使升降平台可以在移动梯上沿竖直方向自由滑
动,使升降平台的高度可以自由调节,适合各种高度,无需增加梯子,大大方便了使用。
附图说明
14.图1为本实用新型的主视图;
15.图2为本实用新型中升降平台的结构示意图;
16.图3为本实用新型中驱动机构的结构示意图。
17.图中标记:1、横杆;2、水平轨道;3、底端横板;4、支撑杆;5、移动梯;51、梯架;52、横杆;53、竖直轨道;54、驱动轮;6、升降平台;61、平台板;62、移动块;63、防护栏;7、驱动机构;71、转动轮;72、驱动电机;73、导向轮;74、平衡块。
具体实施方式
18.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
19.参照图1
‑
3,一种建筑工程智能化自动梯,包括两根横杆1、水平轨道2、底端横板3、支撑杆4、移动梯5、升降平台6和驱动机构7,水平轨道2设置在横杆1的表面,底端横板3设置在横杆1的两端,支撑杆4设置在两根横杆 1之间,移动梯5设置在水平轨道2上,且可以在水平轨道2上延轨道方向自由滑动,升降平台6设置在移动梯5的表面,且可以在移动梯5的表面沿竖直方向自由滑动,驱动机构7设置在移动梯5的顶端,升降平台6通过钢丝与驱动机构7动力连接,移动梯5包括梯架51,梯架51的内测卡接有若干加强杆 52,梯架51的正面两侧设有竖直轨道53,梯架51的顶端和底端安装有驱动轮 54,驱动轮54通过电机驱动,且可以在水平轨道2上自由滚动。
20.通过采用上述技术方案:
21.横杆1的长度可以增加,梯架51通过驱动轮54可以在横杆1上的竖直轨道53上自由滑动,保证梯架51可以延水平方向自由移动,无需人工推动,自动化程度高,方便使用。
22.升降平台6包括平台板61,平台板61的背面靠近竖直轨道53的位置焊接有移动块62,移动块62可与竖直轨道53相互咬合,且可以在竖直轨道53上沿竖直方向自由滑动,平台板61的顶面焊接有防护栏63,驱动机构7包括转动轮71,转动轮71的一侧通过齿轮动力连接有驱动电机72,转动轮71远离驱动电机72的一侧设有导向轮73,导向轮73通过转轴安装在移动梯5上,转动轮71的底面通过钢丝连接有平衡块74,平衡块74可以在移动梯5的背面沿竖直方向自由滑动,转动轮71的圆心位置设有收集轮,收集轮通过钢丝与升降平台6连接,转动轮71通过钢丝与平衡块74连接。
23.通过采用上述技术方案:
24.驱动电机72可以将动力输送至转动轮71,转动轮71带动收集轮转动,转动的收集轮可以通过钢丝拉动升降平台6,使升降平台6可以在移动梯5上沿竖直方向自由滑动,使升降平台6的高度可以自由调节,适合各种高度,无需增加梯子,大大方便了使用。
25.工作原理,参照图1
‑
3,使用时打开驱动驱动轮54的电机,驱动轮54可以带动梯架51移动,保证梯架51可以延水平方向自由移动,无需人工推动,驱动电机72可以将动力输送至转动轮71,转动轮71带动收集轮转动,转动的收集轮可以通过钢丝拉动升降平台6,使升
降平台6可以在移动梯5上沿竖直方向自由滑动,使升降平台6的高度可以自由调节,适合各种高度,无需增加梯子。
26.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种建筑工程智能化自动梯,包括两根横杆(1)、水平轨道(2)、底端横板(3)、支撑杆(4)、移动梯(5)、升降平台(6)和驱动机构(7),其特征在于:所述水平轨道(2)设置在横杆(1)的表面,所述底端横板(3)设置在横杆(1)的两端,所述支撑杆(4)设置在两根横杆(1)之间,所述移动梯(5)设置在水平轨道(2)上,且可以在水平轨道(2)上延轨道方向自由滑动,所述升降平台(6)设置在移动梯(5)的表面,且可以在移动梯(5)的表面沿竖直方向自由滑动,所述驱动机构(7)设置在移动梯(5)的顶端,升降平台(6)通过钢丝与驱动机构(7)动力连接。2.如权利要求1所述的一种建筑工程智能化自动梯,其特征在于:所述移动梯(5)包括梯架(51),所述梯架(51)的内测卡接有若干加强杆(52),所述梯架(51)的正面两侧设有竖直轨道(53),所述梯架(51)的顶端和底端安装有驱动轮(54),所述驱动轮(54)通过电机驱动,且可以在水平轨道(2)上自由滚动。3.如权利要求2所述的一种建筑工程智能化自动梯,其特征在于:所述升降平台(6)包括平台板(61),所述平台板(61)的背面靠近竖直轨道(53)的位置焊接有移动块(62),移动块(62)可与竖直轨道(53)相互咬合,且可以在竖直轨道(53)上沿竖直方向自由滑动,所述平台板(61)的顶面焊接有防护栏(63)。4.如权利要求3所述的一种建筑工程智能化自动梯,其特征在于:所述驱动机构(7)包括转动轮(71),所述转动轮(71)的一侧通过齿轮动力连接有驱动电机(72),所述转动轮(71)远离驱动电机(72)的一侧设有导向轮(73),所述导向轮(73)通过转轴安装在移动梯(5)上,所述转动轮(71)的底面通过钢丝连接有平衡块(74)。5.如权利要求4所述的一种建筑工程智能化自动梯,其特征在于:所述平衡块(74)可以在移动梯(5)的背面沿竖直方向自由滑动。6.如权利要求5所述的一种建筑工程智能化自动梯,其特征在于:所述转动轮(71)的圆心位置设有收集轮,收集轮通过钢丝与升降平台(6)连接,所述转动轮(71)通过钢丝与平衡块(74)连接。
技术总结
本实用新型公开了一种建筑工程智能化自动梯,包括两根横杆、水平轨道、底端横板、支撑杆、移动梯、升降平台和驱动机构,所述水平轨道设置在横杆的表面,所述底端横板设置在横杆的两端,所述支撑杆设置在两根横杆之间,所述移动梯设置在水平轨道上,且可以在水平轨道上延轨道方向自由滑动,所述升降平台设置在移动梯的表面,且可以在移动梯的表面沿竖直方向自由滑动,所述驱动机构设置在移动梯的顶端。本实用新型横杆的长度可以增加,梯架通过驱动轮可以在横杆上的竖直轨道上自由滑动,保证梯架可以延水平方向自由移动,无需人工推动,自动化程度高,方便使用,使升降平台的高度可以自由调节,适合各种高度,无需增加梯子,大大方便了使用。使用。使用。
技术研发人员:孙娜
受保护的技术使用者:上海申青建设集团有限公司
技术研发日:2020.11.30
技术公布日:2021/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1