一种移动机器人的制作方法
1.本实用新型涉及清洁技术领域,特别指一种移动机器人。
背景技术:
2.目前,随着移动机器人等智能自移动机器人设备成为了市场上越来越受欢迎的产品,如何保证移动机器人的使用寿命和稳定性,成为了业内亟需解决的技术问题。当下,大多使用保险杠对移动机器人进行保护,保险杠是为了防护扫地机前部的安全装置。当扫地机撞到障碍物时,保险杠吸收和减缓外界冲击力,再借由保险杠后方的金属弹片的回弹性使其复位。但是由于保险杠是塑料材质,且撞击时整体受力不均匀,长久累积就会导致保险杠的变形,使其受到撞击后无法顺利回弹复位,影响扫地机的性能。
3.因此,有必要提出一种移动机器人,用以解决现有技术中保险杠在长久使用状态下造成的保护失效的问题。
技术实现要素:
4.实用新型目的:为了克服现有技术中存在的不足,本实用新型提供一种能够满足长久使用的移动机器人。
5.技术方案:一种移动机器人,包括:
6.可移动的主体和设于所述主体前侧且与所述主体弹性连接的弧形挡板,所述弧形挡板在受压后向所述主体方向移动,还包括:连杆,所述连杆两端分别连接所述弧形挡板的两端处,用以防止弧形挡板向外扩张。
7.进一步地,所述弧形挡板上端设有朝向所述主体方向水平延伸的护板,所述连杆两端的底部通过支杆连接所述护板。
8.进一步地,所述支杆和所述连杆为一体制造而成的。
9.进一步地,所述支杆底部设有卡扣,对应地所述护板设有通孔,所述支杆通过所述卡扣穿过所述通孔形成与所述护板的可拆卸连接。
10.进一步地,所述连杆高度被设置为高于所述主体顶部。
11.进一步地,所述连杆两端底部设有支杆,所述连杆被设置为高于所述主体顶部,且所述连杆、所述支杆和所述弧形挡板为一体制造而成的。
12.进一步地,所述主体顶部设有避让所述连杆的凹陷部,当所述弧形挡板在受压后向所述主体方向移动时,所述连杆进入所述凹陷部。
13.有益效果:通过设置连杆,连杆两端分别连接弧形挡板两端,在移动机器人撞击障碍物时,弧形挡板受到撞击向主体方向移动,从而吸收冲击力,同时由于连杆对弧形挡板两端的约束,能使整个弧形挡板作为一个整体朝同一个方向运动,防止因两端外扩而导致的变形卡死现象发生。
附图说明
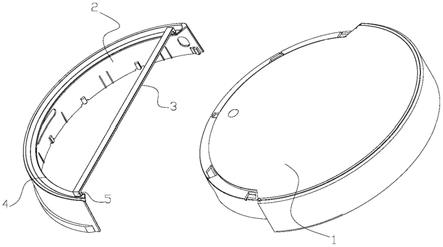
14.附图1为本实用新型一种移动机器人的实施例1的爆炸结构示意图;
15.附图2为图1所示移动机器人的卡扣部分立体结构示意图;
16.附图3为图1所示移动机器人的立体结构示意图;
17.附图4为本实用新型一种移动机器人的实施例2的爆炸结构示意图。
具体实施方式
18.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.需要说明的是,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
20.参见图1-3所示的本实用新型移动机器人的实施例1,本实施例移动机器人可以应用于包括但不限于扫地机器人、消费服务机器人、除草机器人等等任何可移动的机器人。在本实施例中,移动机器人包括:主体1和弧形挡板2。弧形挡板2设于所述主体1前侧且与所述主体1弹性连接,以使得所述弧形挡板2在受压后向所述主体1方向移动,并且可以在压力解除后回复至初始位置。还包括:连杆3,所述连杆3两端分别连接所述弧形挡板 2的两端处,用以防止弧形挡板2向外扩张。
21.通过设置连杆3,连杆3两端分别连接弧形挡板2两端,在移动机器人撞击障碍物时,弧形挡板2受到撞击向主体1方向移动,从而吸收冲击力,同时由于连杆3对弧形挡板2两端的约束,能使整个弧形挡板2作为一个整体朝同一个方向运动,防止因两端外扩而导致的变形卡死现象发生。
22.在本实施例中,所述弧形挡板2上端设有朝向所述主体方向水平延伸的护板4,所述连杆3两端的底部通过支杆5连接所述护板4。护板4的设置,不但可以给支杆5提供可靠的连接点,而且可以一定程度上保护主体1 前侧,防止上方灰尘等脏污污染主体前侧。
23.作为对本实施例进一步地优化,所述支杆5底部设有卡扣51,对应地所述护板4设有通孔,所述支杆5通过所述卡扣51穿过所述通孔形成与所述护板4的可拆卸连接,以方便将连杆3从护板4上拆卸下来,更加方便。优选地,所述连杆3高度被设置为高于所述主体1顶部,使得用户可以直接将连杆3作为提手使用。
24.而在其他的一些实施例中,所述支杆5和所述连杆3为一体制造而成的。
25.参见图4所示的本实用新型移动机器人的实施例2,区别于实施例1 的是:所述主体1顶部设有避让所述连杆3的凹陷部6,当所述弧形挡板2 在受压后向所述主体1方向移动时,所述连杆3进入所述凹陷部6,从而可以将连杆3顶部高度与主体1高度设置为一致,以降低移动机器人的整体高度,方便运输和存储。本实施例其他结构同实施例1。
26.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种移动机器人,包括可移动的主体和设于所述主体前侧且与所述主体弹性连接的弧形挡板,所述弧形挡板在受压后向所述主体方向移动,其特征在于,还包括:连杆,所述连杆两端分别连接所述弧形挡板的两端处,用以防止弧形挡板向外扩张。2.根据权利要求1所述的一种移动机器人,其特征在于:所述弧形挡板上端设有朝向所述主体方向水平延伸的护板,所述连杆两端的底部通过支杆连接所述护板。3.根据权利要求2所述的一种移动机器人,其特征在于:所述支杆和所述连杆为一体制造而成的。4.根据权利要求2所述的一种移动机器人,其特征在于:所述支杆底部设有卡扣,对应地所述护板设有通孔,所述支杆通过所述卡扣穿过所述通孔形成与所述护板的可拆卸连接。5.根据权利要求1-4中任一项所述的一种移动机器人,其特征在于:所述连杆高度被设置为高于所述主体顶部。6.根据权利要求5所述的一种移动机器人,其特征在于:所述连杆两端底部设有支杆,且所述连杆、所述支杆和所述弧形挡板为一体制造而成的。7.根据权利要求1所述的一种移动机器人,其特征在于:所述主体顶部设有避让所述连杆的凹陷部,当所述弧形挡板在受压后向所述主体方向移动时,所述连杆进入所述凹陷部。
技术总结
本实用新型公开了一种移动机器人,包括:可移动的主体和设于所述主体前侧且与所述主体弹性连接的弧形挡板,所述弧形挡板在受压后向所述主体方向移动,还包括:连杆,所述连杆两端分别连接所述弧形挡板的两端处,用以防止弧形挡板向外扩张。通过设置连杆,连杆两端分别连接弧形挡板两端,在移动机器人撞击障碍物时,弧形挡板受到撞击向主体方向移动,从而吸收冲击力,同时由于连杆对弧形挡板两端的约束,能使整个弧形挡板作为一个整体朝同一个方向运动,防止因两端外扩而导致的变形卡死现象发生。发生。发生。
技术研发人员:戴英鹏 张睿鹏
受保护的技术使用者:深圳市云视机器人有限公司
技术研发日:2021.07.26
技术公布日:2022/1/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1