机器人真空清洁系统的制作方法
本发明涉及一种机器人真空清洁系统。
背景技术:
1、在过去的十年里,机器人真空吸尘器市场增长迅猛。生活方式的改变、可支配收入的增加、城市化以及对节省劳动力设备的日益关注是推动市场增长的一些因素,而且这一趋势似乎将继续下去。
2、虽然真空吸尘器的机器人化已使更多产品进入市场,但此类机器人的外形并未趋于多样化。一般来说,市场上可用的机器人真空吸尘器是盘状的,高度较低,因此它们可以在家具下面移动,以便在那里进行清洁。主要的技术发展集中在提高导航能力,以提高自主性,以及垃圾箱清空系统和运行时间。然而,总的来说,机器人真空吸尘器市场包括许多通常为圆形的机器,这些机器在差异化方面提供的很少。
3、已经做出了一些努力来改进机器人真空吸尘器的功能,以应对苛刻的环境。例如,us2020/001468描述了一种机器人圆筒式机器,其具有可以单独移动的清洁头。因此,清洁头可以驱动自己远离机器的主体,以便在家具下面伸展。
4、us2018/317725和us2010/0256812描述了配备有机器人臂的盘状机器人。然而,这两个示例似乎都不是实际应用,并且机器人臂在每种情况下的效用似乎是有限的。
5、正是在这种背景下设计了本发明的实施例。
技术实现思路
1、根据本发明的第一方面,提供了一种真空清洁系统,包括机器人单元和对接接口,机器人单元包括牵引装置,对接接口用于接收手持式真空吸尘器。机器人单元限定从抽吸端口延伸到对接接口的抽吸流动路径。该真空清洁系统还包括配置为经由抽吸端口与对接接口对接的手持式真空吸尘器,手持式真空吸尘器包括用于在与对接接口对接时通过抽吸流动路径抽吸空气的真空电机。该真空清洁系统还包括抽吸工具,该抽吸工具配置为附接到机器人单元的抽吸端口并且还附接到手持式真空吸尘器的抽吸端口。
2、有利地,本发明为用户提供了一种特别用户友好的清洁系统,用户能够使用手持式真空吸尘器进行污点清洁或更大的清洁任务,但随后能够将手持式真空吸尘器对接到机器人单元上进行自主清洁任务。方便的是,机器人单元和手持式真空吸尘器能够共享一个或多个公共抽吸工具,这意味着两台机器都可以针对它们要清洁的表面进行优化。抽吸工具可以是被动的,即没有电动衬套杆或搅拌器,例如可以是针对硬地板优化的地板工具的情况,或者抽吸工具可以是电动的,这使得它们特别适合于堆叠的地板覆盖物,例如地毯和小地毯。
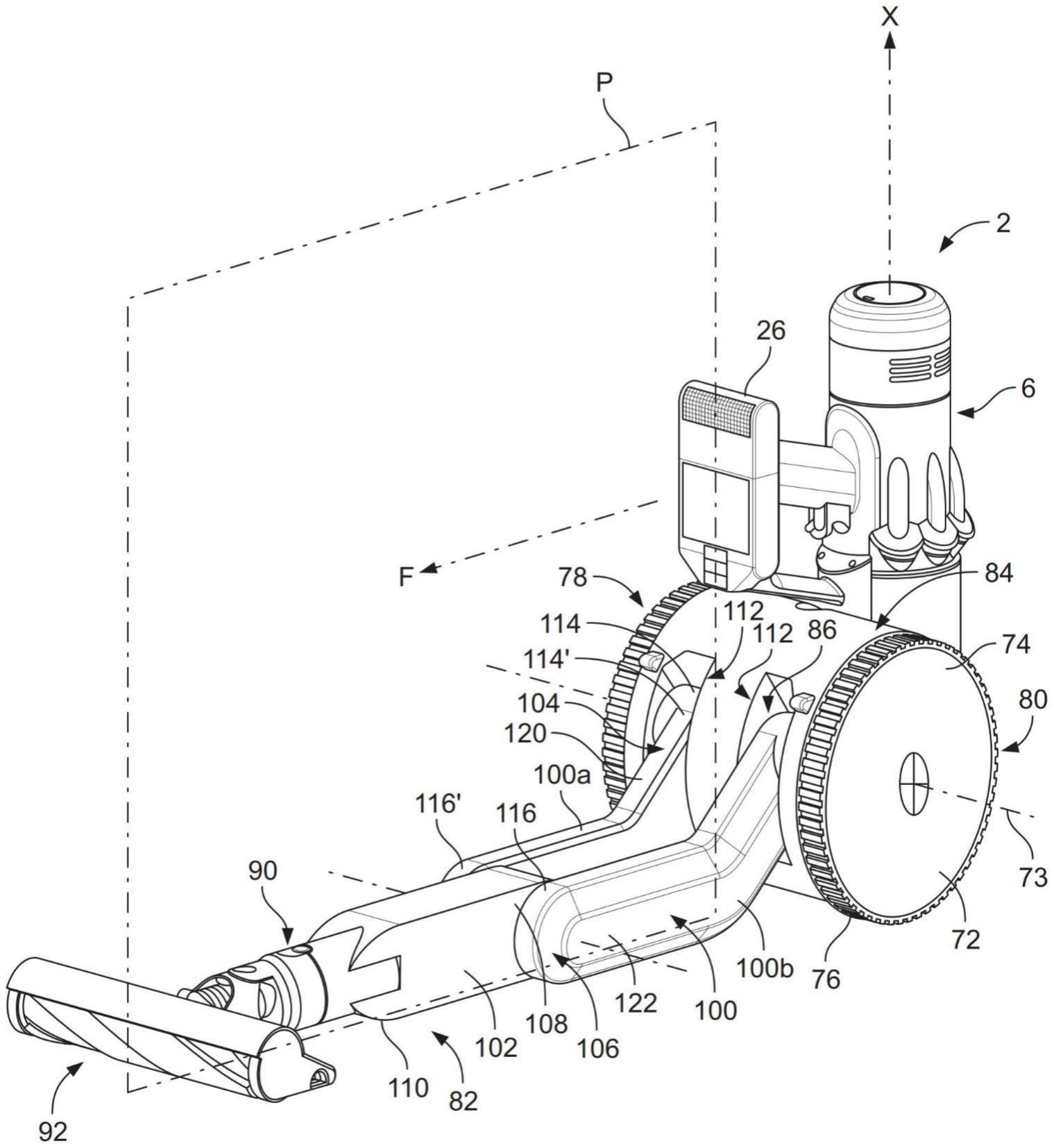
3、在特别有利的示例中,机器人单元包括从其延伸的铰接臂,以提供额外的清洁功能和灵活性。机器人单元的抽吸端口可以限定在铰接臂的端部。因此,抽吸工具可以连接到铰接臂上的抽吸端口,该铰接臂提供了机器人单元将其延伸到家具等之下的能力,或者甚至延伸到需要清洁的凸起位置。方便地,抽吸流动路径可以至少部分地由铰接臂限定。因此,抽吸流动路径可以通过臂的外壳或壳体隐藏起来,外壳或壳体为机器提供干净的外观,并且还保护抽吸流动路径免受损坏。
4、在本发明的有益示例中,对接接口设置在牵引装置的第一侧上,并且铰接臂从牵引装置的第二侧上的位置从机器人单元延伸。这为机器提供了一定程度的平衡,因为手持式真空吸尘器和铰接臂的相对较重的部件位于真空吸尘器系统的主体的两侧。
5、铰接臂可以以各种方式驱动。在一种实用的布置中,铰接臂是可致动的,使得铰接臂能够提升抽吸工具。这有助于抽吸工具达到升高的位置进行清洁。铰接臂的肩关节和肘关节可以以协调的方式被驱动以实现该功能。
6、手持式真空吸尘器可以以各种方式安装到机器人单元上,例如为了改善用户的人机工程学。在一个这样的示例中,手持式吸尘器具有纵向轴线,抽吸喷嘴和真空电机沿着该纵向轴线定向,其中手持式真空吸尘器安装到对接接口上,使得纵向轴线横向于并且可选地垂直于由牵引装置限定的地平面延伸。因此,手持式真空吸尘器以自然的位置呈现给用户,以便用户以方便的方式抓住真空吸尘器的手柄。在这样的布置中,手持式真空吸尘器的手柄可以横向于纵向轴线延伸并且大体上平行于地板表面,即大体上水平延伸。
7、手持式真空吸尘器还可以包括灰尘分离器,灰尘分离器可以是旋风灰尘分离器。手持式真空吸尘器的这种配置可以为清洁系统提供特别有效的分离系统。尽管系统可以使用设置在机器人单元中的电池组,但在一些示例中,手持式真空吸尘器包括电池组,当与机器人单元结合使用时,它可以使用电池组来产生吸力。
8、在本申请的范围内,明确的意图是,在前述段落、权利要求书和/或以下说明书和附图中列出的各个方面、实施例、示例和替代方案,以及特别是其个别特征,可以独立地或以任何组合的方式采取。也就是说,所有实施例和/或任何实施例的特征可以以任何方式和/或组合来结合,除非这些特征不兼容。申请人保留更改任何最初提交的权利要求或相应地提交任何新权利要求的权利,包括修改任何最初提交的权利要求以根据和/或纳入任何其他权利要求的任何特征的权利,尽管最初不是以这种方式提交的。
技术特征:
1.一种真空清洁系统,包括:
2.根据权利要求1所述的真空清洁系统,其中,所述机器人单元包括从其延伸的铰接臂。
3.根据权利要求2所述的真空清洁系统,其中,所述机器人单元的抽吸端口限定在所述铰接臂的端部。
4.根据权利要求3所述的真空清洁系统,其中,所述抽吸流动路径至少部分地由所述铰接臂限定。
5.根据权利要求2至4中任一项所述的真空清洁系统,其中,所述牵引装置限定滚动轴线,并且其中,所述对接接口设置在所述滚动轴线的第一侧上,并且其中,所述铰接臂从所述机器人单元从所述滚动轴线的第二侧上的位置延伸。
6.根据权利要求2至5中任一项所述的真空清洁系统,其中,所述铰接臂是可致动的,使得所述铰接臂能够提升所述抽吸工具。
7.根据前述权利要求中任一项所述的真空清洁系统,其中,所述手持式吸尘器具有纵向轴线,抽吸喷嘴和真空电机沿着所述纵向轴线定向,其中,所述手持式真空吸尘器安装到所述对接接口上,使得所述纵向轴线横向于并且可选地垂直于由所述牵引装置限定的地平面延伸。
8.根据前述权利要求中任一项所述的真空清洁系统,其中,所述抽吸工具包括可旋转的搅拌器。
9.根据前述权利要求中任一项所述的真空清洁系统,其中,所述抽吸工具经由细长棒附接到所述手持式真空吸尘器。
技术总结
一种真空清洁系统,包括机器人单元和对接接口,机器人单元包括牵引装置,对接接口用于接收手持式真空吸尘器。机器人单元限定从抽吸端口延伸到对接接口的抽吸流动路径。该真空清洁系统还包括配置为经由抽吸端口与对接接口对接的手持式真空吸尘器,手持式真空吸尘器包括用于在与对接接口对接时通过抽吸流动路径抽吸空气的真空电机。该真空清洁系统还包括抽吸工具,该抽吸工具配置为附接到机器人单元的抽吸端口并且还附接到手持式真空吸尘器的抽吸端口。有利地,本发明为用户提供了一种特别用户友好的清洁系统,用户能够使用手持式真空吸尘器进行污点清洁或更大的清洁任务,但随后能够将手持式真空吸尘器对接到机器人单元上进行自主清洁任务。方便的是,机器人单元和手持式真空吸尘器能够共享一个或多个公共抽吸工具,这意味着两台机器都可以针对它们要清洁的表面进行优化。抽吸工具可以是被动的,即没有电动衬套杆或搅拌器,例如可以是针对硬地板优化的地板工具的情况,或者抽吸工具可以是电动的,这使得它们特别适合于堆叠的地板覆盖物,例如地毯和小地毯。
技术研发人员:A·肖,D·牛顿,D·科尔
受保护的技术使用者:戴森技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!