可调节的椅子以及相关联的系统、方法、设备和软件与流程
本技术总体上涉及可编程的椅子以及用于控制和调节可调节的椅子的系统、方法、装置和软件。
背景技术:
1、随着对由长时间就坐——特别是当就坐于未能提供足够的身体支撑或阻碍用户以平衡体态(gesture)就坐的椅子上时——引起的职业伤害的意识提高,符合人体工程学地调节或定位办公椅子或任务椅子的能力变得越来越重要。虽然可调节的任务椅子或办公椅子提供了用以调节椅子部件的许多方式,但是如果用户不了解各种椅子调节的方式或原因,则这可能导致在提供足够的支撑和促进更健康的就坐体态方面较差地适合用户的椅子配置。尽管意识提高,但是除了基本舒适度偏好之外,用户通常对如何调节椅子具有较少了解,并且当一个人每天一次就坐几个小时时,这可能变得有问题。长时间就坐于较差地调节的椅子上可能导致各种各样的健康问题:不良体态、重复性运动伤害、背部疼痛、肌肉骨骼失常等。最终,健康问题可以导致因缺勤、损失的生产力以及增加的医疗保健、残疾和工人赔偿费用而给雇主带来的高成本。然而,通过提供符合人体工程学地设计的工作空间和家具,这些伤害在很大程度上是可防止的。
2、人体工程学是对人与其工作环境之间的相互作用的研究,重点是提高工人效率、生产力以及健康和安全。符合人体工程学地调节的椅子可以减轻或消除疲劳、不适和由一次就坐几个小时引起的伤害。为了降低伤害和肌肉骨骼失调的风险,重要的是将办公椅子等调节到用于每个用户的最符合人体工程学的正确位置。
3、典型的可调节的任务椅子或办公椅子可以以多种方式被手动调节。例如,用户可以调节椅子的高度、手臂的位置和高度、头枕的位置以及腰部支撑的张力。在许多椅子上,座部(seat)深度、座部倾斜、腰部支撑高度和靠背倾斜也是可调节的。一些椅子包括液压或气动致动器来调节椅子的各个部分、其他使用齿轮、杠杆和机械装置,然而仍有其他椅子采用电机(motor,马达)。
4、尽管有能力调节多种椅子部件,但是用户倾向于根据感知的舒适度来调节他们的椅子,该感知的舒适度并不总是与降低伤害风险的最佳的人体工程学位置相关。在一些情况下,用户将“按原样(as is)”就坐于椅子上,或将仅调节高度,因为他们不知道如何使用其他椅子调节。并且即使用户聘请运动学家或人体工程学专家来调节他们的椅子,椅子通常在办公室内四处移动并且被多人使用,从而导致用于这些用户的椅子调节的丧失。
技术实现思路
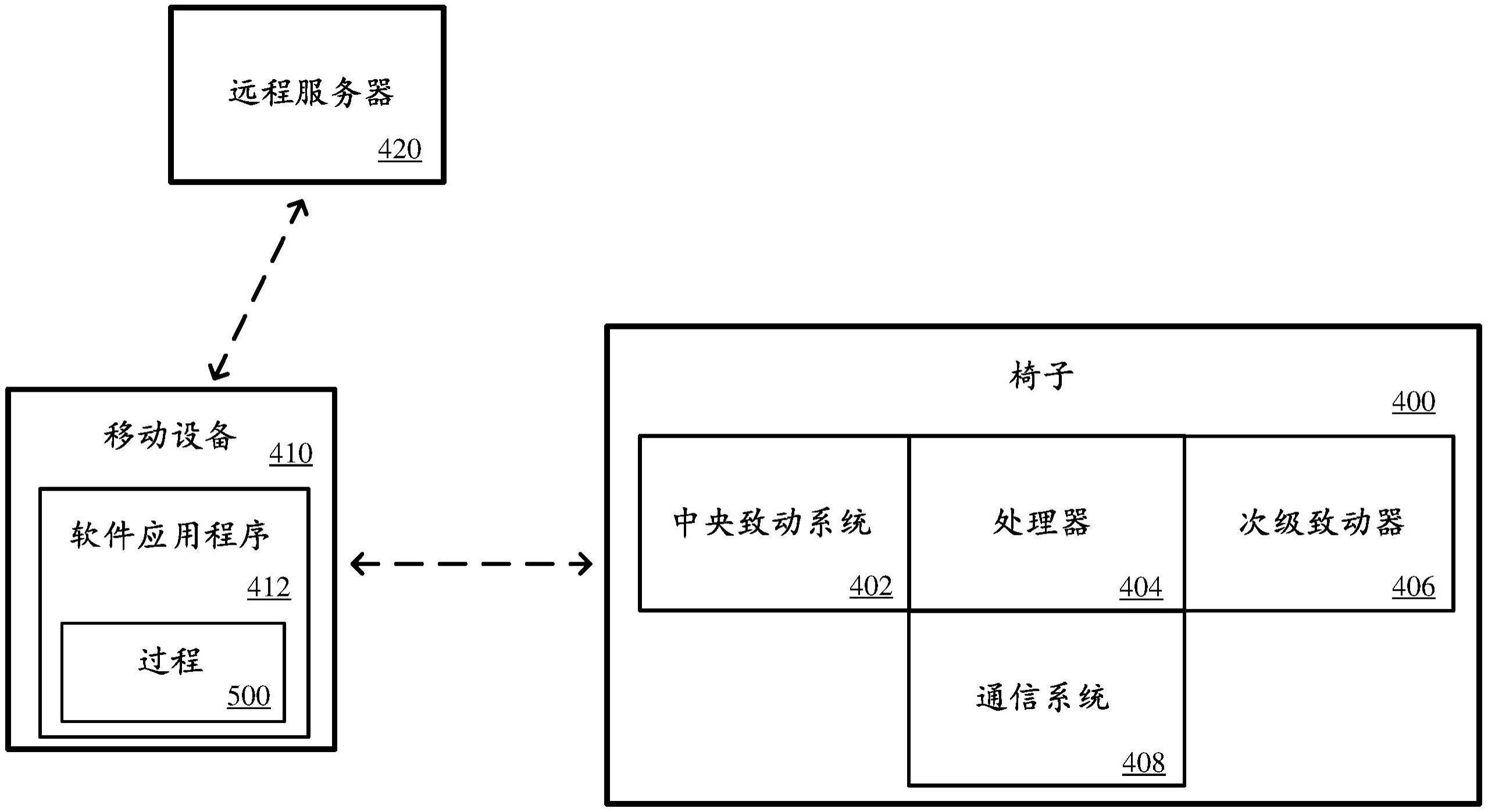
1、本文公开了用于配置可调节的椅子的技术,该技术允许以对于用户而言符合人体工程学地优化的方式来调节椅子。该椅子——其具有用于定位椅子的多种部件的致动器——与在移动设备上操作的软件应用程序无线通信。该应用程序能够从用户接收信息,诸如用户的身体测量结果以及可选地其他个人数据。基于此信息,该应用程序通过应用来自与人体工程学研究相关的数个不同科学领域的因素来计算用于椅子的符合人体工程学的最佳调节。该应用程序然后将这些调节传输到执行调节的椅子。
2、在多个实施方式中,一种控制可调节的人体工程学椅子的方法包括以下步骤:测量人的身高;将该人的所述身高录入移动设备上的软件应用程序中;拍摄该人的照片;分析所述照片以估计该人的身体测量结果;将所述测量结果存储在所述移动设备中;基于所述测量结果来计算所述椅子的最佳的人体工程学调节;以及将信号传输到所述椅子中的控制器以控制致动器并且调节所述椅子中的多种部件以实现所述最佳的人体工程学调节。
3、在多个实施方式中,所述可调节的人体工程学椅子包括附接到底座(base)的座部、可调节的扶手和可调节的靠背。该椅子还包括机动化的中央致动器系统,该中央致动器系统使用球移位联接系统(ball-shift coupling system)选择和调节多种椅子部件。该椅子还包括用于调节多种其他椅子部件的次级(secondary)致动器。该椅子能够与外部计算机进行无线通信,它从该外部计算机接收用以操作中央致动器和次级致动器的命令。
4、在多个实施方式中,所述控制可调节的人体工程学椅子的方法包括以下步骤:测量用户的身高;将所述身高录入在移动设备上运行的软件应用程序中;拍摄所述用户的一个或多个照片;分析所述照片以确定所述用户的身体测量结果;将所述测量结果存储在所述移动设备上将此信息存储在运行所述应用程序的所述移动设备中;基于所述用户的身体测量结果来计算用于所述椅子的所述最佳的人体工程学调节;以及将这些调节传输到所述椅子,所述椅子使用致动器系统来相应地调节椅子部件。
5、在多个实施方式中,用于调节可调节的人体工程学椅子的所述软件应用程序在能够执行以下步骤的计算设备上操作:使得用户能够拍摄他或她自己的多种照片;在所述设备上显示所述照片,如此所述用户能够以图形方式指示多种个人身体测量结果;通过考虑所述用户的已知身高分析所述照片来计算个人身体尺寸;以及基于来自与人体工程学研究相关的数个不同科学领域的因素来计算符合人体工程学的最佳椅子调节。
6、该技术的实施方式包括对以下的调节:座部高度、倾斜和深度;扶手高度和宽度;靠背倾斜和高度(用于腰部支撑);以及腰部支撑密度。一个实施方式基于特定用户的身体测量结果和其他特性来确定用于可调节的椅子的符合人体工程学的最佳调节。在多个实施方式中,将调节从移动设备——诸如智能电话或平板计算机——无线传输到椅子,尽管也可以通过有线连接传输所述调节。在多个实施方式中,如果期望,用户可以否决(override)建议的设置。
7、多个实施方式还包括中央服务器。所述服务器能够存储基于用户的身体特性推荐的人体工程学椅子设置,该推荐的设置可以不时地被更新并且传输到移动设备。用户可以选择与中央服务器共享他们的个人数据,并且此数据然后被用来优化设置。例如,被收集并且被保存并且然后被用来改进人体工程学产品设计的人体测量数据包括(但不限于):出生日期、性别、身高、体重、就坐姿势偏好(seated position preference)、膝盖高度、髋部高度、肘部高度、腰部曲线高度、髋部广度(breadth)、肩部广度、座部宽度、座部深度、扶手宽度、扶手高度、座部高度、腰部支撑高度、腰部支撑密度、倾斜角度以及用户的调节否决日志。
技术特征:
1.一种远程可调节的人体工程学椅子,包括:
2.根据权利要求1所述的远程可调节的人体工程学椅子,还包括中央服务器,所述中央服务器包含计算机存储设备,所述计算机存储设备被操作性地布置为存储用于办公椅子的最佳的人体工程学数据,所述服务器与所述移动设备处于通信中,其中所述服务器被布置为将更新的最佳的人体工程学数据传输到所述移动设备。
3.根据权利要求1所述的远程可调节的人体工程学椅子,其中所述多个致动器被操作性地布置为控制对以下中的一个或多个的调节:座部高度、座部深度、座部倾斜、扶手宽度、扶手高度、腰部高度、腰部支撑密度和靠背角度。
4.根据权利要求1所述的远程可调节的人体工程学椅子,其中当所述用户站立、双臂在所述用户的侧面伸展以及手掌张开时取得的个人身体后视测量结果选自由以下组成的组:所述用户的身高、所述用户的臀部的宽度以及所述用户的左三角肌和右三角肌之间的近似距离。
5.根据权利要求1所述的远程可调节的人体工程学椅子,其中当所述用户站立、双臂在所述用户的侧面伸展以及手掌张开时取得的所述个人身体侧视测量结果选自由以下组成的组:从所述用户的头部的顶部到所述用户的肘部的中间的距离、从所述用户的头部的顶部到所述用户的腰部曲线的中间的距离、从所述用户的头部的顶部到所述用户的臀部的最突出部分的距离以及从所述用户的头部的顶部到所述用户的髌骨的近似基部的距离。
6.根据权利要求1所述的远程可调节的人体工程学椅子,其中所述椅子包括:
7.根据权利要求6所述的远程可调节的人体工程学椅子,其中所述电源是可拆卸地安装到所述椅子的电池。
8.根据权利要求6所述的远程可调节的人体工程学椅子,其中所述外部设备是计算机。
9.根据权利要求6所述的远程可调节的人体工程学椅子,其中所述外部设备是移动设备。
10.一种远程可调节的人体工程学椅子,包括:
11.根据权利要求10所述的远程可调节的人体工程学椅子,其中所述可调节的底座被操作性地布置为响应于至少一个所述球联接器的激活而致动,以至少接合所述次级螺杆轴或同时接合所述初级螺杆轴和所述次级螺杆轴。
12.根据权利要求11所述的远程可调节的人体工程学椅子,其中所述可调节的扶手被操作性地布置为响应于至少一个所述球联接器或所述多个次级致动器中的至少一个的激活而致动。
13.根据权利要求12所述的远程可调节的人体工程学椅子,其中所述可调节的靠背被操作性地布置为响应于所述多个次级致动器中的至少一个而致动。
14.根据权利要求10所述的远程可调节的人体工程学椅子,其中所述座部被操作性地布置为在深度、高度和倾斜方面是可调节的。
15.根据权利要求10所述的远程可调节的人体工程学椅子,其中所述可调节的扶手被操作性地布置为在高度和宽度方面是可调节的。
16.根据权利要求10所述的远程可调节的人体工程学椅子,其中所述可调节的靠背被操作性地布置为在高度、角度和腰部支撑密度方面是可调节的。
17.一种控制人体工程学任务椅子的方法,包括以下步骤:
18.根据权利要求17所述的方法,其中所述照片是用所述移动设备拍摄的。
19.一种计算装置,包括:
20.根据权利要求19所述的计算装置,包括由处理系统可执行的另外的程序指令,该另外的程序指令引导所述处理系统至少存储所述符合人体工程学的最佳调节。
21.根据权利要求19所述的计算装置,包括由处理系统可执行的另外的程序指令,该另外的程序指令引导所述处理系统基于选自包括以下的组的因素来计算所述符合人体工程学的最佳调节:性别、年龄、体重、舒适度偏好、就坐姿势偏好和所述用户的鞋类的鞋跟高度。
22.根据权利要求19所述的计算装置,包括由处理系统可执行的另外的程序指令,该另外的程序指令引导所述处理系统将所述符合人体工程学的最佳调节传输到可调节的人体工程学椅子。
23.一个或多个计算机可读存储介质,其上存储有程序指令,当由一个或多个处理器执行时,所述程序指令引导计算装置至少:
24.根据权利要求23所述的一个或多个计算机可读存储介质,包括由处理系统可执行的另外的程序指令,该另外的程序指令引导所述处理系统至少存储所述符合人体工程学的最佳调节。
25.根据权利要求23所述的一个或多个计算机可读存储介质,包括由处理系统可执行的另外的程序指令,该另外的程序指令引导所述处理系统基于选自包括以下的组的因素来计算所述符合人体工程学的最佳调节:性别、年龄、体重、舒适度偏好、就坐姿势偏好和所述用户的鞋类的鞋跟高度。
26.根据权利要求23所述的一个或多个计算机可读存储介质,包括由处理系统可执行的另外的程序指令,该另外的程序指令引导所述处理系统将所述符合人体工程学的最佳调节传输到可调节的人体工程学椅子。
技术总结
一种控制可调节的椅子的方法,包括以下步骤:测量人的身高;将该人的身高录入移动设备上的软件应用程序中;用移动设备拍摄该人的照片;分析所述照片以确定该人的身体测量结果;将所述测量结果存储在所述移动设备中;基于存储的所述测量结果来计算所述椅子的最佳的人体工程学调节;以及,将信号传输到所述椅子中的控制器以控制致动器并且调节所述椅子中的多种部件以实现最佳的人体工程学调节。该技术还包括通过上述方法调节的人体工程学任务椅子。
技术研发人员:D·吉尔斯特罗姆,P·M·常,S·伊
受保护的技术使用者:斯特罗姆人体工程学公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!