清洁机器人的制作方法
本申请涉及清洁电器,特别涉及一种清洁机器人。
背景技术:
1、随着智能清洁技术的发展,清洁机器人越来越普及,能够自动完成清扫、吸尘、擦地等工作,逐步取代传统的人工清洁。通常,扫地机器人包括驱动机构和清洁机构,驱动机构驱动清洁机构转动以进行清洁工作。而为了增加清洁机构的清洁范围,大多数清洁机构可以在不同位置之间运动,以对边角区域进行清洁。这种清洁机构除了驱动清洁机构本身进行旋转清洁的驱动机构以外,还需要附带另外的驱动机构,以驱动清洁机构运动到边角区域进行清洁,驱动机构的增加导致清洁机器人的结构复杂。
技术实现思路
1、本申请提供了一种清洁机器人,至少用于解决清洁机器人增加清洁范围时清洁机器人结构复杂的问题。
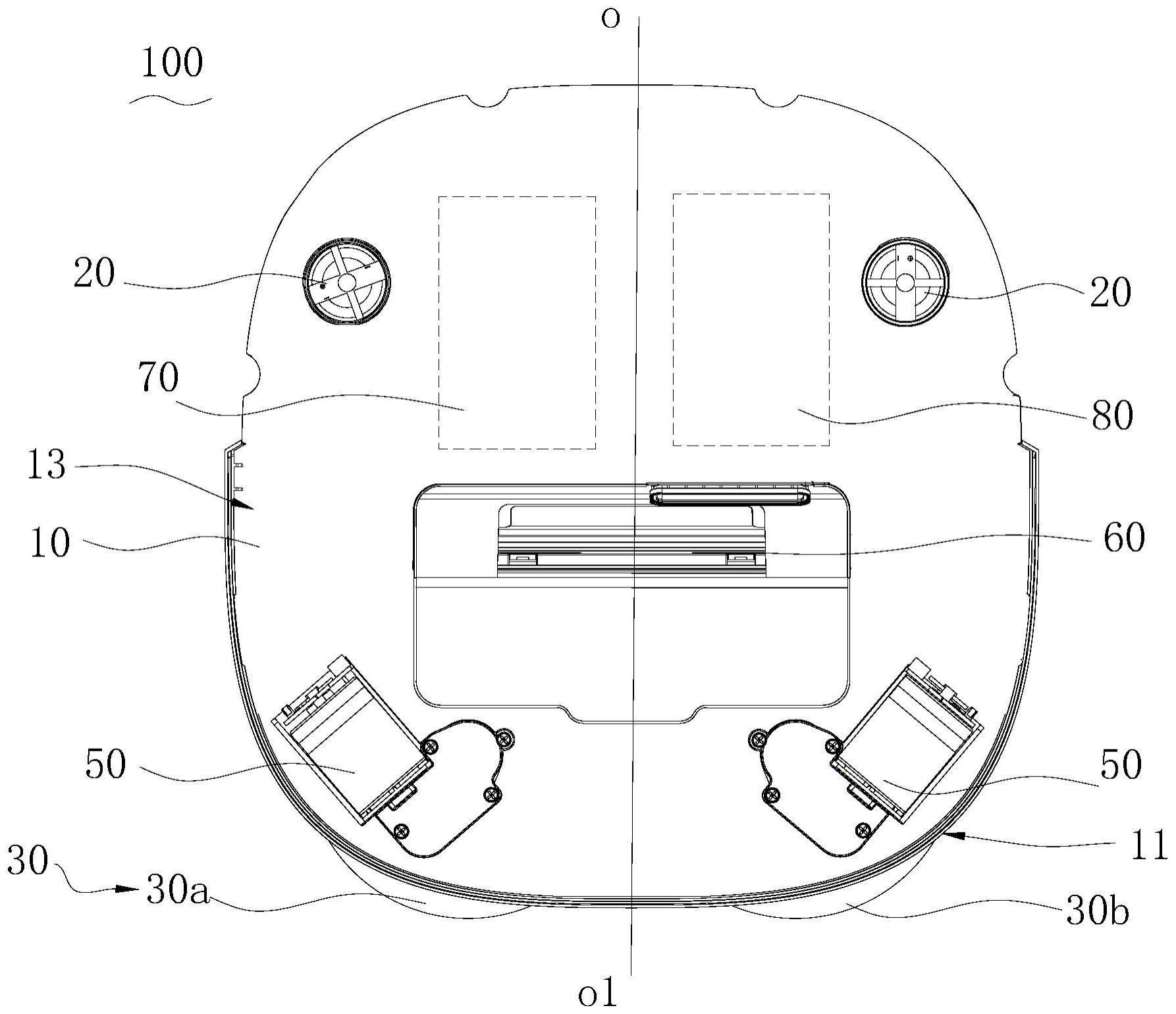
2、本申请实施方式提供一种清洁机器人。清洁机器人包括机体、清洁组件及驱动模块。所述机体包括相背的第一侧和第二侧。所述清洁组件安装于所述第一侧,并用于清洁待清洁物。所述驱动模块安装于所述第二侧,所述驱动模块与所述清洁组件连接,并用于带动所述清洁组件旋转;在所述驱动模块带动所述清洁组件旋转的过程中,所述清洁组件旋转产生的作用力能够带动所述清洁组件在第一位置和第二位置之间运动。
3、本申请的清洁机器人中,驱动模块带动清洁组件进行旋转,以使清洁组件对待清洁物进行旋转清洁,且,清洁组件旋转产生的作用力带动清洁组件在第一位置和第二位置之间运动,增大清洁组件的清洁范围。清洁组件依靠自身的旋向改变来完成不同位置的切换,不需要附加其他动力装置,使得清洁机器人结构简单,清洁机器人的成本更低。
4、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述清洁组件位于所述第一位置时,所述清洁组件的边缘位于所述机体的边缘投影区域以外的投影面积,小于所述清洁组件位于所述第二位置时,所述清洁组件的边缘位于所述机体的边缘投影区域以外的面积。
3.根据权利要求1所述的清洁机器人,其特征在于,所述机体设有第一限位孔,所述驱动模块包括连接件,所述清洁组件与所述第一限位孔对应,所述连接件与所述清洁组件连接,所述连接件能够转动以带动所述清洁组件旋转,所述第一限位孔用于限制所述清洁组件在所述第一位置和所述第二位置之间运动。
4.根据权利要求1所述的清洁机器人,其特征在于,所述机体还设有第二限位孔,所述驱动模块还包括限位件,所述限位件与所述第二限位孔配合,以使所述驱动模块绕所述限位件在所述第二侧转动。
5.根据权利要求1所述的清洁机器人,其特征在于,所述驱动模块包括:
6.根据权利要求5所述的清洁机器人,其特征在于,所述第一壳体设有支撑件,所述支撑件与所述第二侧接触,并用支撑所述第一壳体。
7.根据权利要求5所述的清洁机器人,其特征在于,所述驱动模块还包括:
8.根据权利要求5所述的清洁机器人,其特征在于,所述第一壳体设有第一配合件和至少一个第二配合件,所述传动组件还包括:
9.根据权利要求8所述的清洁机器人,其特征在于,所述传动组件还包括第一轴承和第二轴承,所述第一轴承和所述第二轴承均套设于所述输出轴,并位于所述第二输出件的相背两侧,所述第一轴承安装于所述第一配合件,所述第二轴承安装于所述驱动模块的第二壳体。
10.根据权利要求1所述的清洁机器人,其特征在于,所述清洁组件包括:
11.根据权利要求10所述的清洁机器人,其特征在于,所述清洁组件还包括结合件,所述结合件安装于所述第一盖体,并用于将所述清洁件安装于所述第一盖体。
12.根据权利要求10所述的清洁机器人,其特征在于,所述第一盖体设有第三限位孔,所述第三限位孔与所述连接件配合;所述清洁组件还包括:
技术总结
本申请提供的清洁机器人包括机体、清洁组件及驱动模块。机体包括相背的第一侧和第二侧。清洁组件安装于第一侧,并用于清洁待清洁物。驱动模块安装于第二侧,驱动模块与清洁组件连接,并用于带动清洁组件旋转;在驱动模块带动清洁组件旋转的过程中,清洁组件旋转产生的作用力能够带动清洁组件在第一位置和第二位置之间运动。本申请的清洁机器人中,驱动模块带动清洁组件进行旋转,以使清洁组件对待清洁物进行旋转清洁,且,清洁组件旋转产生的作用力带动清洁组件在第一位置和第二位置之间运动,增大清洁范围,清洁组件依靠自身的旋向改变来完成不同位置的切换,不需要附加其他动力装置,使得清洁机器人结构简单。
技术研发人员:徐建强,朱小刚
受保护的技术使用者:美智纵横科技有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!