用于失能人员的辅助清洁装置的制作方法
1.本发明涉及护理器械技术领域,特别地涉及一种用于失能人员的辅助清洁装置。
背景技术:
2.对于失能人员大小便的卫生处理问题向来是比较困难的问题,对失能人员而言,需要护理人员辅助其进行清洁同时还需要对其进行精神抚慰,使其身体上干净整洁,心理上舒服自在;对护理人员而言,则需要较强的体力操作,因此需要一种能够帮助解决失能人员大小便的卫生处理问题的装置,从而使护理人员能够轻松护理,失能人员能够更舒心。
技术实现要素:
3.本发明提供一种用于失能人员的辅助清洁装置,用于帮助解决失能人员大小便的卫生处理问题。
4.本发明提供一种用于失能人员的辅助清洁装置,包括:
5.可移动的支架;
6.抬腿装置,其可设置在所述支架上,所述抬腿装置构造为能够带动使用者的腿部升高或降低;以及
7.清洁装置,所述清洁装置包括设置在所述支架底部的升降机构和与所述升降机构相连的机械臂机构,所述机械臂机构上设置有清洁机构;
8.所述升降机构带动所述机械臂机构升降,从而调节所述清洁机构与使用者的待清洁部位之间在第一方向上的距离;
9.所述机械臂机构构造为能够伸展或折叠,从而调节所述清洁机构与使用者的待清洁部位之间在第二方向和第三方向上的距离。
10.在一些实施方式中,所述机械臂机构包括第一驱动杆和第一机械臂,所述第一驱动杆的第一端与所述第一机械臂的第一端相连;所述机械臂机构完全折叠时,所述第一驱动杆和所述第一机械臂相平行;
11.所述支架上分别设置有沿所述第一方向延伸的第一滑轨和第二滑轨,所述第一驱动杆的第二端可滑动地设置在所述第一滑轨上,所述第一机械臂的第一端可滑动地设置在所述第二滑轨上;
12.所述第一驱动杆用于驱动所述第一机械臂以所述第二滑轨的轴线为旋转轴进行旋转。
13.在一些实施方式中,所述机械臂机构还包括第二机械臂和第二驱动杆,所述第二机械臂的第一端设置有所述清洁机构,所述第二机械臂的第二端与所述第一机械臂的第二端转动相连,所述第二驱动杆的第一端与所述第一机械臂的第一端转动相连,所述第二驱动杆的第二端通过连接机构与所述第一机械臂和所述第二机械臂转动相连;
14.所述第二驱动杆用于驱动所述第二机械臂以所述第二机械臂和所述第一机械臂的连接处为枢转点进行旋转,以使所述清洁机构改变其位置。
15.在一些实施方式中,所述第一机械臂的第二端设置有朝向所述第二机械臂倾斜的第一斜臂,所述第二机械臂的第二端设置有朝向所述第一机械臂倾斜的第二斜臂,所述第一斜臂端部和所述第二斜臂的端部转动连接,且所述第一斜臂端部和所述第二斜臂的端部的连接处为所述第二机械臂的枢转点。
16.在一些实施方式中,所述连接机构包括与所述第一斜臂转动连接的第一弧形连杆以及与所述第二斜臂转动连接的第二弧形连杆,所述第一弧形连杆和所述第二弧形连杆均与所述第二驱动杆的第二端转动相连。
17.在一些实施方式中,所述升降机构包括设置在所述机械臂机构下方的驱动板以及与所述驱动板相连的第三驱动杆;
18.所述驱动板分别与所述第一驱动杆的第二端以及所述第一机械臂的第一端相连,所述第三驱动杆用于使所述驱动板在第一方向上移动,从而带动所述机械臂机构在第一方向上移动。
19.在一些实施方式中,所述第一滑轨上还套设有弹性蓄能元件,所述弹性蓄能元件的一端抵靠在所述第一驱动杆的第二端,所述弹性蓄能元件的另一端固定于所述支架上。
20.在一些实施方式中,所述抬腿装置包括腿部固定器和固定在所述支架上的滑轮机构,所述腿部固定器与所述滑轮机构相连;
21.所述腿部固定器包括两个凹陷部,所述凹陷部用于放置使用者的腿部;所述凹陷部的侧壁设置有气囊,所述气囊充气时,将使用者的腿部挤压固定在所述凹陷部中;所述气囊放气时,将使用者的腿部松开。
22.在一些实施方式中,还包括设置在所述腿部固定器上的第一定位装置和第二定位装置;
23.所述第一定位装置与所述第三驱动杆信号连接,所述第一定位装置确定所述机械臂机构位于第一方向上的目标位置时,使所述第三驱动杆停止动作;
24.所述第二定位装置分别与所述第一驱动杆和所述第二驱动杆信号连接,所述第二定位装置确定所述清洁机构位于第二方向和第三方向上的目标位置时,使所述第一驱动杆和所述第二驱动杆停止动作。
25.在一些实施方式中,所述清洁机构包括清洗刷头、位于所述清洗刷头上方的清洗喷头和暖风喷头,所述清洗喷头和所述暖风喷头分别与所述支架底部的储液罐和风机相连。
26.与现有技术相比,本发明的优点在于,通过自动调节清洁机构与使用者的待清洁部位之间在第一方向上、第二方向和第三方向上的距离,使清洁机构在机械臂机构带动下移动到与待清洁部位附近的指定位置处,从而对待清洁部位进行清洗等操作,因此通过抬腿装置、升降机构和机械臂机构的共同作用,能够轻护理人员的劳动强度,又可让失能人员得到细心、卫生的护理。
附图说明
27.在下文中将基于实施例并参考附图来对本发明进行更详细的描述。
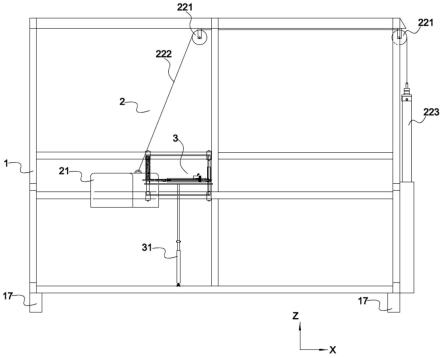
28.图1是本发明的实施例中用于失能人员的辅助清洁装置的主视图,其中未示出床和使用者;
29.图2是本发明的实施例中用于失能人员的辅助清洁装置的侧视图,其中未示出床和使用者;
30.图3是本发明的实施例中床的主视图;
31.图4是本发明的实施例中用于失能人员的辅助清洁装置的主视图,其中示出了床;
32.图5是本发明的实施例中用于失能人员的辅助清洁装置的主视图,其中示出了床和使用者,并且使用者的腿部为放平的状态;
33.图6是本发明的实施例中用于失能人员的辅助清洁装置的侧视图,其中示出了床;
34.图7是本发明的实施例中用于失能人员的辅助清洁装置的主视图,其中,使用者的腿部为抬高的状态;
35.图8是本发明的实施例中用于失能人员的辅助清洁装置的侧视图,示出了使用者的腿部为抬高的状态时,滑轮机构的位置;
36.图9是图1所示的清洁装置的主视图;
37.图10是图9所示的机械臂机构为折叠状态的结构示意图;
38.图11是图9所示的机械臂机构中第一机械臂为展开状态的结构示意图;
39.图12是图9所示的机械臂机构中第二机械臂为展开状态的结构示意图;
40.图13是图9所示的机械臂机构为展开状态的使用示意图;
41.图14是图1所示的腿部固定器的俯视图;
42.图15是图1所示的腿部固定器的主视图;
43.图16是图3所示床的俯视图;
44.图17是本发明的实施例中用于失能人员的辅助清洁装置的主视图,其中示出了第一定位装置捕捉第一感应位置的视图;
45.图18是图7在i处的放大图;
46.图19是图7在ii处的放大图。
47.附图标记:
48.1-支架;11-第一滑轨;12-第二滑轨;13-弹性蓄能元件;14-上固定板;15-下固定板;16-卡具;17-滚轮;18-第一感应位置;19-第二感应位置;
49.2-抬腿装置;
50.21-腿部固定器;
51.211-凹陷部;212-气囊;213-钩部;214-安装板;
52.22-滑轮机构;
53.221-滑轮;222-牵引绳;223-电机;
54.3-清洁装置;
55.31-升降机构;
56.311-驱动板;312-第三驱动杆;313-推块;
57.32-机械臂机构;
58.321-第一驱动杆;322-第一机械臂;323-第二机械臂;324-第二驱动杆;
59.325-第一斜臂;326-第二斜臂;327-第一弧形连杆;328-第二弧形连杆;329-套筒;
60.33-清洁机构;
61.331-清洗刷头;332-清洗喷头;333-暖风喷头;334-波纹管;335-水管;336-风管;
62.34-联接件;
63.35-收集装置;
64.351-防水布;352-臀部垫;353-收纳盆;354-排污管;
65.4-第一定位装置;5-第二定位装置;
66.6-使用者;7-床。
具体实施方式
67.下面将结合附图对本发明作进一步说明。
68.如图1-图4所示,本发明提供一种用于失能人员的辅助清洁装置,可为丧失生活自理能力的人提供辅助清洁,例如更换纸尿裤、清洗烘干便后卫生等。具体来说,本发明的辅助清洁装置包括可移动的支架1、抬腿装置2和清洁装置3。或者更进一步地,还包括用于支撑使用者6的床7。其中,支架1的底端设置有滚轮17,由一个护理人员即可轻松推动支架1。支架1的其中一侧或其中一端为敞开状态,推动支架1将其移动至床7的附近时,可从床7的一端或一侧推入,从而将床7以及其上的使用者6包围在中间,以便对使用者6进行卫生清理等操作。
69.因此可以理解地,本发明的辅助清洁装置还可包括床7,其与支架1相匹配。
70.如图5-图8抬腿装置2可设置在支架1上,抬腿装置2构造为能够带动使用者6的腿部(包括臀部)升高或降低。清洁装置3设置在支架1上,当抬腿装置2将使用者6的腿部抬高后(如图7所示),清洁装置3可调节其与使用者6的待清洁部位之间的位置,从而对待清洁部位进行卫生清理。
71.其中,清洁装置3包括设置在支架1底部的升降机构31和与升降机构31相连的机械臂机构32,机械臂机构32上设置有清洁机构33。升降机构31带动机械臂机构32升降,从而调节清洁机构33与使用者6的待清洁部位之间在第一方向(如图1所示z轴方向)上的距离;机械臂机构32构造为能够伸展或折叠,从而调节清洁机构33与使用者6的待清洁部位之间在第二方向(如图1所述x轴方向)和第三方向(如图2所述y轴方向)上的距离。
72.如图9-图13所示,机械臂机构32包括第一驱动杆321和第一机械臂322,第一驱动杆321的第一端(即图10所示右端)与第一机械臂322的第一端(即图10所示右端)相连;机械臂机构32完全折叠时(如图10所示),第一驱动杆321和第一机械臂322大致平行。
73.如图9和图10所示,支架1上分别设置有沿第一方向延伸的第一滑轨11和第二滑轨12,第一驱动杆321的第二端(即图10所示左端)可滑动地设置在第一滑轨11上,第一机械臂322的第一端(即图10所示右端)可滑动地设置在第二滑轨12上。第一驱动杆321用于驱动第一机械臂322以第二滑轨12的轴线(即图11所示枢转点a)为旋转轴进行旋转。因此,第一驱动杆321动作时,第一驱动杆321和第一机械臂322之间的角度可增大或减小。如图10所示,第一驱动杆321和第一机械臂322相平行,二者之间的角度为最小;如图11所示,第一驱动杆321动作时,第一机械臂322绕枢转点a逆时针旋转,使第一驱动杆321和第一机械臂322之间的角度增大(即机械臂机构32为展开状态)。
74.优选地,第一驱动杆321为电动推杆或气动推杆。
75.更具体地,第一驱动杆321的第二端设置有联接件34,联接件34套设在第一滑轨11上,第一驱动杆321和联接件34可在第一滑轨11上滑动。第一机械臂322的第一端设置有套
筒329,套筒329套设在第二滑轨12上,第一机械臂322和套筒329可在第二滑轨12上滑动。
76.可以理解地,第一驱动杆321的第二端也可通过套筒与第一滑轨11可滑动地连接。
77.进一步地,机械臂机构32还包括第二机械臂323和第二驱动杆324,第二机械臂323的第一端(如图12所示右端)设置有清洁机构33,第二机械臂323的第二端(如图12所示左端)与第一机械臂322的第二端(如图12所示左端)转动相连,第二驱动杆324的第一端(如图12所示右端)与第一机械臂322的第一端(如图12所示右端)转动相连,第二驱动杆324的第二端(如图12所示左端)通过连接机构与第一机械臂322和第二机械臂323转动相连。
78.其中,第二驱动杆324用于驱动第二机械臂323以第二机械臂323和第一机械臂322的连接处为枢转点(如图12所示枢转点b)进行旋转,以使清洁机构33改变其位置。
79.如图11所示,第二驱动杆324未动作时,第一机械臂322和第二机械臂323大致平行。如图12所示,第二驱动杆324动作时,第二机械臂323以其与第一机械臂322的连接处为枢转点顺时针旋转,使其与第一机械臂322之间的角度增大(即机械臂机构32为展开状态)。
80.优选地,第二驱动杆324为电动推杆或气动推杆。
81.更进一步地,第一机械臂322的第二端(如图12所示左端)设置有朝向第二机械臂323倾斜的第一斜臂325(即向下倾斜),第二机械臂323的第二端(如图12所示左端)设置有朝向第一机械臂322倾斜的第二斜臂326(即向上倾斜),第一斜臂325端部和第二斜臂326的端部转动连接,且第一斜臂325端部和第二斜臂326的端部的连接处为第二机械臂323的枢转点。
82.其中,第一斜臂325与第一机械臂322之间的角度大于90
°
,例如可以是135
°
,第二斜臂326与第二机械臂323之间的角度也可以大于90
°
,例如可以是135
°
,第一斜臂325和第二斜臂326在端部处枢转连接。
83.第一斜臂325与第一机械臂322之间的角度与第二斜臂326与第二机械臂323之间的角度相同,从而在折叠状态时,第二机械臂323大致与第一机械臂322共线(如图10所示),二者的延伸方向相同。
84.连接机构包括与第一斜臂325转动连接的第一弧形连杆327以及与第二斜臂326转动连接的第二弧形连杆328,第一弧形连杆327和第二弧形连杆328均与第二驱动杆324的第二端(如图12所示左端)转动相连。
85.如图12所示,第二驱动杆324动作时,推动第一弧形连杆327和第二弧形连杆328二者之间的角度增大,继而使第二机械臂323绕枢转点b顺时针旋转,则其与第一机械臂322之间的角度增大。第二机械臂323绕枢转点b可顺时针旋转180
°
,即第二机械臂323处在第一机械臂322的反向延长线上,二者的延伸方向相反。
86.如图13所示,第二机械臂323调整到适合的位置后,其第一端的清洁机构33可对准使用者待清洗的部位,从而执行清洁操作。
87.如图9和图13所示,升降机构31包括设置在机械臂机构32下方的驱动板311以及与驱动板311相连的第三驱动杆312。驱动板311分别与第一驱动杆321的第二端(如图13所示左端)以及第一机械臂322的第一端(如图13所示右端)相连。具体地,如图9所示,驱动板311上设置有推块313,推块313与分别设置在第一驱动杆321的第二端的下方以及第一机械臂322的第一端的下方。第三驱动杆312动作时,带动驱动板311在第一方向上移动,从而推动第一驱动杆321和第一机械臂322在第一方向上移动,从而调整机械臂机构32在第一方向上
的位置。
88.如图9和图13所示,第一滑轨11和第二滑轨12贯穿驱动板311,第一滑轨11和第二滑轨12并排设置,二者的上端均通过卡具16与支架1上的上固定板14相连,二者的下端均通过卡具16与支架1上的下固定板15相连。
89.如图9所示,第一滑轨11上还套设有弹性蓄能元件13,其中弹性蓄能元件13例如可以是弹簧元件。弹性蓄能元件13的一端抵靠在第一驱动杆321的第二端,更具体地,弹性蓄能元件13的一端抵靠在联接件34上。弹性蓄能元件13的另一端固定于支架1上,更具体地,弹性蓄能元件13的另一端固定上固定板14。
90.如上文所述,当机械臂机构32为展开状态时,第一机械臂322和第二机械臂323完全展开,二者的重量会使联接件34在第一滑轨11上向上滑动,通过弹性蓄能元件13向下的压力,可以联接件34与机械臂机构32之间保持平衡稳定。
91.如图1、图2、图5、图7、图14和图15所示,抬腿装置2包括腿部固定器21和固定在支架1上的滑轮机构22,腿部固定器21与滑轮机构22相连。滑轮机构22包括设置在支架1上方的两个滑轮221(定滑动轮)、电机223和牵引绳222,牵引绳222与电机223相连后,依次穿过两个滑轮221,与腿部固定器21上的钩部213(如图15所示)相连。通过电机223驱动牵引绳222,可拉动腿部固定器21上升或下降,从而带动使用者6的腿部抬起(如图7所示)或放平(如图5所示)。
92.如图14所示,腿部固定器21包括两个凹陷部211,凹陷部211用于放置使用者6的腿部。其中,两个凹陷部211可以对称地设置,因此腿部固定器21大致呈“山”字型。凹陷部211的侧壁设置有气囊212。当将使用者6的小腿放入凹陷部211中后,给气囊212充气,则气囊212膨胀,由于受到凹陷部211空间的局限,使用者6的腿部会被气囊212挤压固定在凹陷部211中;反之,气囊212放气时,将使用者6的腿部松开。
93.将使用者6的腿部放入腿部固定器21后,可将其小腿部分抬高,从而机械臂机构32执行定位操作,调整其在第一方向、第二方向和第三方向上的位置,从而使清洁机构33对准使用者待清洗的部位,以执行清洁操作。
94.在一些可选地实施方式中,通过设置在腿部固定器21上的第一定位装置4和第二定位装置5来执行机械臂机构32的定位操作。
95.第一定位装置4与第三驱动杆312信号连接,第一定位装置4确定机械臂机构32位于第一方向上的目标位置时,使第三驱动杆312停止动作;
96.第二定位装置5分别与第一驱动杆321和第二驱动杆324信号连接,第二定位装置5确定清洁机构33位于第二方向和第三方向上的目标位置时,使第一驱动杆321和第二驱动杆324停止动作。
97.具体地,第一定位装置4可以是红外线光电开关,其位于两个凹陷部211之间的对称轴上。如图17所示,支架1在第一方向上设置有第一感应位置18,第一定位装置4可以捕捉到第一感应位置18,该位置用于指示机械臂机构32在第一方向上的预定位置。滑轮机构22带动腿部固定器21向上升起时,当第三驱动杆312同步带动驱动板311和机械臂机构32在第一方向上移动,当腿部固定器21在上升过程中,第一定位装置4捕捉到第一感应位置18时,第一定位装置4向第三驱动杆312发出信号,第三驱动杆312停止动作,机械臂机构32到达第一方向上的预定位置。
98.第二定位装置5也可以是红外线光电开关。两个凹陷部211之间设置有安装板214,如图14所示,安装板214在第二方向(x轴方向)上延伸超过腿部固定器21,第二定位装置5设置在安装板214上超出腿部固定器21的部分。
99.如图16所示,床7在第二方向上的对称轴为l1,在第三方向上的对称轴为l2,对称轴l1和l2相交处为第二感应位置19。第二定位装置5可以捕捉到第二感应位置19,该位置用于指示机械臂机构32在第二方向和第三方向上的预定位置。
100.第一驱动杆321和第二驱动杆324分别使第一机械臂322和第二机械臂323调整第二方向和第三方向上的位置,当第二定位装置5可以捕捉到第二感应位置19时,第二定位装置5向第一驱动杆321和第二驱动杆324发出信号,使其停止动作,机械臂机构32到达第二方向和第三方向上的预定位置。
101.当机械臂机构32在第一方向、第二方向和第三方向上的位置确定后,其不再移动;清洁机构33开始执行清洗操作。当清洗操作完成后,机械臂机构32逆向运动,第一驱动杆321和第二驱动杆324动作使第一机械臂322和第二机械臂323收缩,从而使机械臂机构32恢复折叠状态。
102.为了适合高矮胖瘦不同的人群,上述的第一感应位置18可以沿第一方向设置多个,上述的第二感应位置19可以分别沿对称轴为l1和对称轴l2偏移地设置多个。在移动机械臂机构32时,可以根据不同人选择不同的感应位置,从而使清洁机构33能够更好地对应使用者6的待清洁部位。
103.可以理解地,还可设置控制器(未图示)来控制电机223、第一驱动杆321、第二驱动杆324和第三驱动杆312的动作,因此第一定位装置4和第二定位装置5可向控制器反馈信号。
104.在一些可选地实施方式中,还可通过图像分析模块和控制器来执行机械臂机构32的定位操作。具体地,图像分析模块可以识别使用者6的待清洁部位,并通过计算获得待清洁部位的坐标,控制器中的轨迹计算模块根据清洁机构33当前所在的位置和待清洁部位的坐标,计算获得清洁机构33的路径,并选择第一驱动杆321、第二驱动杆324和第三驱动杆312的最优动作,使其将清洁机构33带动到指定的位置。
105.如图7、图18和图19所示,清洁机构33包括清洗刷头331、位于清洗刷头331上方的清洗喷头332和暖风喷头333,清洗喷头332和暖风喷头333分别与支架1底部的储液罐和风机相连。
106.清洗刷头331可以是电动刷头,其可以对需要护理人员的便后待清洁部位进行刷洗。通过清洗喷头332可向待清洁部位喷淋清水进行冲洗,通过暖风喷头333可对待清洁部位进行暖风吹干。
107.如图19所示,清洗喷头332上连接有水管335,暖风喷头333上连接有风管336,清洗喷头332和水管335之间以及暖风喷头333和风管336之间柔性连接。例如,均可通过波纹管334相连。通过波纹管334可调节清洗喷头332和暖风喷头333的角度,从而可调节出水方向和出风方向。
108.水管335和风管336的另一端分别与支架1底部的储液罐和风机(未示出)相连。通过储液罐中的水可通过水管335泵入清洗喷头332,风机可通过风管336提供暖风。
109.进一步地,如图18和图19所示,支架1上还设置有收集装置35,当腿部固定器21带
动使用者6的腿部抬起后,可将收集装置35放置在使用者6的身体下方,从而可收集清洗后的污水。
110.可选地,收集装置35包括收纳盆353、臀部垫352和覆盖在臀部垫352上的防水布351,臀部垫352设置在收纳盆353中,收纳盆353的底端连接有排污管354。
111.优选地,收集装置35包括收纳盆353、臀部垫352防水布351(如图19中粗实线所示),臀部垫352设置在收纳盆353的一侧并设置在使用者6的臀部下方,向腰部延伸,以将使用者的臀部稍稍抬起,从而便于清洗。防水布351覆盖臀部垫352和收纳盆353的一部分,从而使清洗后的水不会顺着流到使用者的身体下方,而使被导流至收纳盆353中。此外,收纳盆353的底端连接有排污管354。臀部垫352设置为锥形结构,其靠近使用者6身体的一端逐渐减小,以便于插入使用者6的身体下方和床7之间。防水布351能够避免使用者6下方的床7被淋湿或弄脏,还可避免冲洗水流过使用者6的身体。通过防水布351和臀部垫352能够保证冲洗时的污水落入收纳盆353中。
112.排污管354与支架1底端的污水罐可拆卸地连接,待清洗完成后,可将排污管354拆下,从而将收集装置35从使用者6的身体下方拿出。
113.虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1