边刷转动的控制方法、装置、存储介质及电子装置与流程
【】本发明实施例涉及通信领域,具体而言,涉及边刷转动的控制方法、装置、存储介质及电子装置。
背景技术
0、
背景技术:
1、随着科技的进步,清洁类智能家居的普及程度越来越高,逐渐进入越来越多的家庭。在清洁类智能设备领域中,边刷是核心部件之一,以扫地机器人为例,边刷多处于扫地机器人的边缘位置,其作用是将灰尘清扫出来,以便扫地机器人底部的吸尘器将灰尘吸干净。
2、现有技术中,清洁设备在执行整个清扫任务的过程中,边刷都维持相同的转速工作,在转速过高的情况下会打飞较小的障碍物,转速过低的情况下会清扫不干净,这会导致清洁设备对边刷转速控制的准确度较低。
3、针对相关技术中清洁设备对边刷转速控制的准确度较低的问题,目前尚未提出有效的解决方案。
技术实现思路
0、
技术实现要素:
1、本发明实施例提供了边刷转动的控制方法、装置、存储介质及电子装置,以至少解决相关技术中清洁设备对边刷转速控制的准确度较低问题。
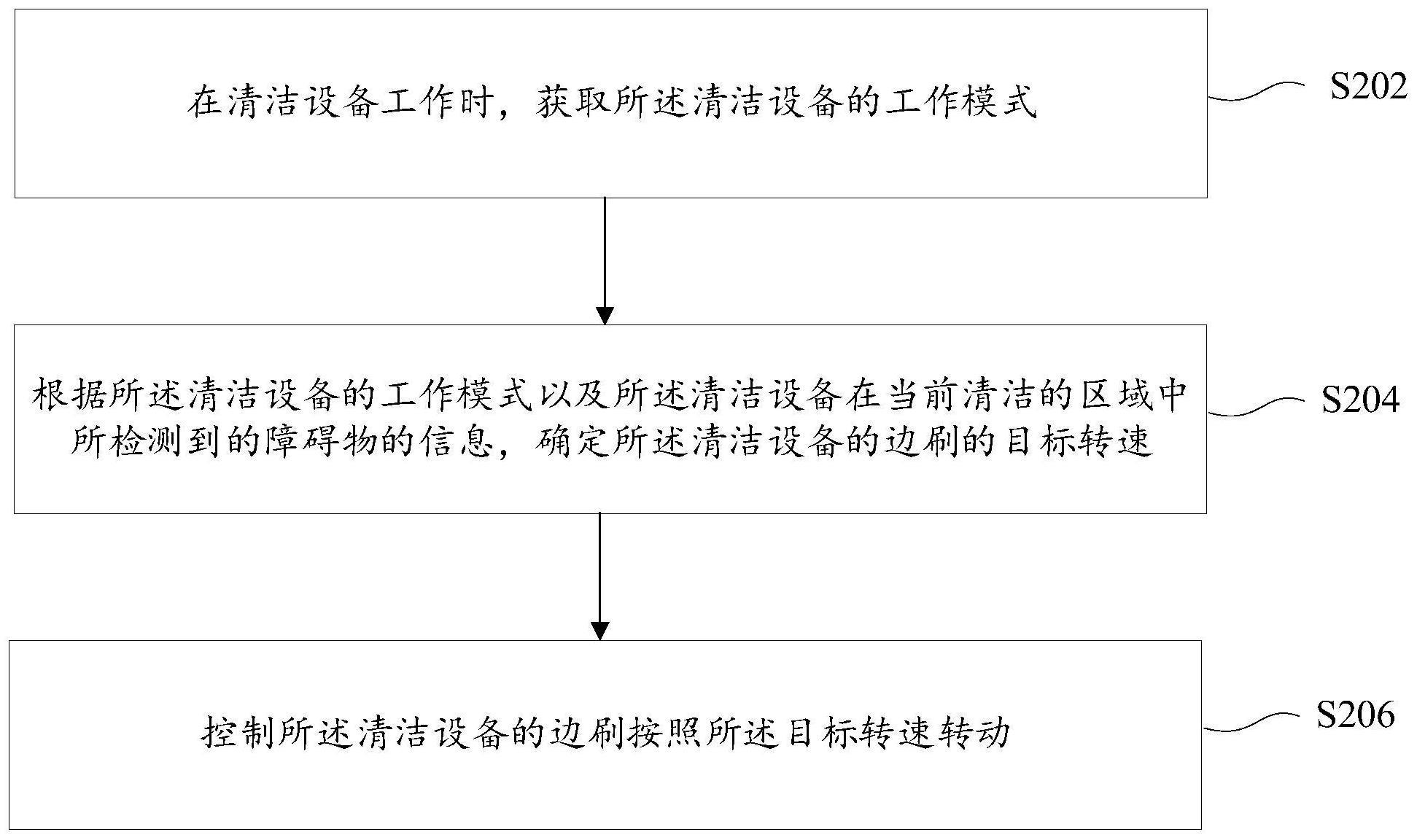
2、根据本发明的一个实施例,提供了一种边刷转动的控制方法,包括:在清洁设备工作时,获取所述清洁设备的工作模式;根据所述清洁设备的工作模式以及所述清洁设备在当前清洁的区域中所检测到的障碍物的信息,确定所述清洁设备的边刷的目标转速;控制所述清洁设备的边刷按照所述目标转速转动。
3、在一个示例性实施例中,所述根据所述清洁设备的工作模式以及所述清洁设备在当前清洁的区域中所检测到的障碍物的信息,确定所述清洁设备的边刷的所述目标转速,包括:在所述清洁设备处于第一工作模式的情况下,根据所述清洁设备在当前清扫的区域中所检测到的障碍物的尺寸信息,确定所述边刷的所述目标转速,其中,所述障碍物的信息包括所述障碍物的尺寸信息;在所述清洁设备处于第二工作模式的情况下,根据所述清洁设备在当前清扫的区域中所检测到的障碍物的类型信息,确定所述边刷的所述目标转速,其中,所述障碍物的信息包括所述障碍物的类型信息。
4、在一个示例性实施例中,所述在所述清洁设备处于第一工作模式的情况下,根据所述清洁设备在当前清扫的区域中所检测到的障碍物的尺寸信息,确定所述清洁设备边刷的所述目标转速,包括:在基于所述尺寸信息确定所述障碍物的尺寸大于或等于预设尺寸阈值的情况下,确定所述边刷的所述目标转速为第一转速;在基于所述尺寸信息确定所述障碍物的尺寸小于所述预设尺寸阈值的情况下,确定所述边刷的所述目标转速为第二转速,其中,所述第一转速大于第二转速。
5、在一个示例性实施例中,所述在所述清洁设备处于第二工作模式的情况下,根据所述清洁设备在当前清扫的区域中所检测到的障碍物的类型信息,确定所述清洁设备边刷的所述目标转速,包括:在基于所述类型信息确定所述障碍物存在尖角的情况下,确定所述边刷的所述目标转速为第三转速,其中,所述尖角的角度小于或等于预设角度阈值;在基于所述类型信息确定所述障碍物不存在所述尖角的情况下,确定所述边刷的所述目标转速为第四转速,其中,所述第三转速大于第四转速。
6、在一个示例性实施例中,所述方法还包括:在所述清洁设备处于所述第一工作模式的情况下,且在确定所述清洁设备未检测到所述障碍物的情况下,确定所述边刷的所述目标转速为第一转速。
7、在一个示例性实施例中,所述第一工作模式包括弓形路线清扫,所述第二工作模式包括沿边清扫。
8、根据本发明的另一个实施例,提供了一种边刷转动的控制装置,包括:获取模块,用于在清洁设备工作时,获取所述清洁设备的工作模式;确定模块,用于根据所述清洁设备的工作模式以及所述清洁设备在当前清洁的区域中所检测到的障碍物的信息,确定所述清洁设备的边刷的目标转速;控制模块,用于控制所述清洁设备的边刷按照所述目标转速转动。
9、根据本发明的又一个实施例,还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,其中,所述计算机程序被处理器执行时实现上述任一项中所述的方法的步骤。
10、根据本发明的又一个实施例,还提供了一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述任一项方法实施例中的步骤。
11、通过本发明,通过获取清洁设备处于工作状态时的工作模式,根据获取到的工作模式,以及清洁设备在当前处于的清洁区域中所检测到的障碍物的信息,确定清洁设备的边刷的目标转速,并控制边刷按照当前确定的目标转速转动。通过清洁设备在不同工作模式下、以及检测到的不同障碍物信息,控制清洁设备的边刷按照不同的转速转动,能够使清洁设备根据不同情况灵活调整边刷的转速,进而可以提高清洁设备的清洁效果,可以解决清洁设备对边刷转速控制的准确度较低的问题,达到了提高清洁设备对边刷转速控制的准确度的效果。
技术特征:
1.一种边刷转动的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述清洁设备的工作模式以及所述清洁设备在当前清洁的区域中所检测到的障碍物的信息,确定所述清洁设备的边刷的所述目标转速,包括:
3.根据权利要求2所述的方法,其特征在于,所述在所述清洁设备处于第一工作模式的情况下,根据所述清洁设备在当前清扫的区域中所检测到的障碍物的尺寸信息,确定所述清洁设备边刷的所述目标转速,包括:
4.根据权利要求2所述的方法,其特征在于,所述在所述清洁设备处于第二工作模式的情况下,根据所述清洁设备在当前清扫的区域中所检测到的障碍物的类型信息,确定所述清洁设备边刷的所述目标转速,包括:
5.根据权利要求2所述的方法,其特征在于,所述方法还包括:
6.根据权利要求2所述的方法,其特征在于,包括:
7.一种边刷转动的控制装置,其特征在于,包括:
8.一种清洁装置,其特征在于,包括权利要求7中所述的装置。
9.一种存储介质,其特征在于,所述存储介质中存储有计算机程序,其中,所述程序可被终端设备或计算机运行时执行所述权利要求1至6任一项中所述的方法。
10.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行所述权利要求1至6任一项中所述的方法。
技术总结
本发明实施例提供了边刷转动的控制方法、装置、存储介质及电子装置,其中,该方法包括:在清洁设备工作时,获取清洁设备的工作模式;根据清洁设备的工作模式以及清洁设备在当前清洁的区域中所检测到的障碍物的信息,确定清洁设备的边刷的目标转速;控制清洁设备的边刷按照目标转速转动。通过本发明,解决了相关技术中清洁设备对边刷转速控制的准确度较低问题,进而达到了提高清洁设备对边刷转速控制的准确度的效果。
技术研发人员:王元超,耿文峰,徐银波
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!