清洁机器人的制作方法
本发明涉及自动清洁设备领域,特别涉及一种清洁机器人。
背景技术:
1、现有的扫拖一体式清洁机器人其拖擦功能的实现一般通过在配备的基站里打湿清洁件后对地面进行拖擦;但是不同的污迹对清洁件的湿度有不同的需求。清洁件湿度过小,待清洁面可能会清洁不干净;而清洁件湿度过大,又使得清洁过的地面湿度较大,自然晾干的时间比较长,特别是在潮湿的回南天或阴雨的天气,过湿的地板存在人走过不小心滑倒的风险,而且容易滋生细菌。
2、此外,对于配备具有自动清洗和自动烘干功能的基站的清洁机器人,清洁机器人一般在完成清洁任务或者电量不足时才会返回基站,但是对于已经执行过清洁任务的机器人,其清洁件上已经产生污渍,此时湿的清洁件返回基站会使已经清洁过的地面产生二次污染,影响其工作效果。
3、可见,现有技术还有待改进和提高。
技术实现思路
1、鉴于上述现有技术的不足之处,本发明的目的在于提供一种清洁机器人,旨在解决现有技术中如上所述的任一技术问题。
2、为了达到上述目的,本发明采取了以下技术方案:
3、本发明第一方面提供了一种清洁机器人,所述清洁机器人包括:
4、第一机器人,设有清洁件,用于清洁待清洁面;
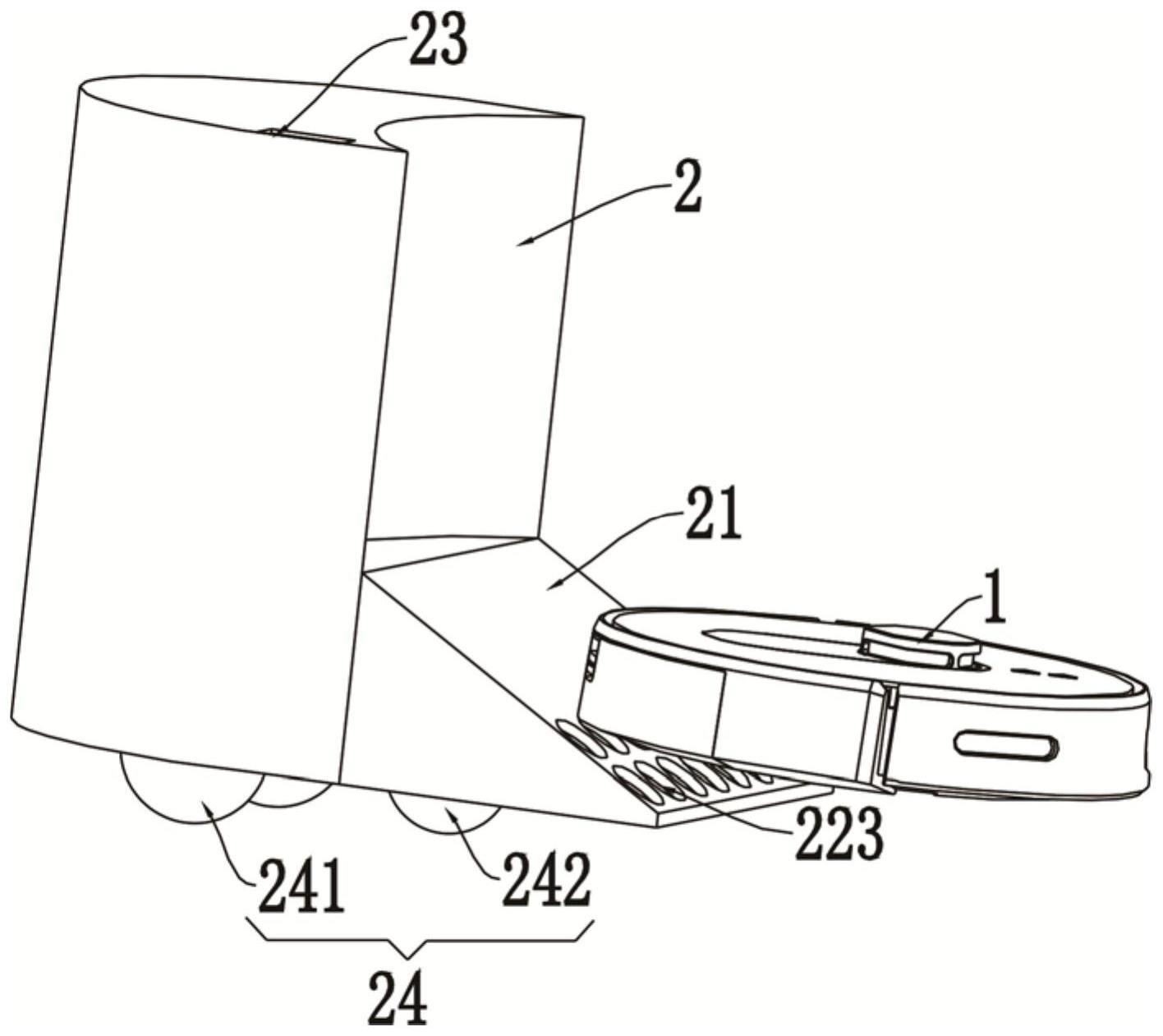
5、第二机器人,与所述第一机器人通信连接,所述第二机器人配置为根据所示第一机器人的状况决定是否向所述第一机器人靠近,所述第二机器人限定有烘干结构,所述烘干结构能用于对靠近或接触所述第二机器人的所述第一机器人烘干。
6、可选地,所述烘干结构配置能用于烘干第一机器人的清洁件。
7、可选地,所述烘干结构包括行走坡,所述第一机器人可连接在所述行走坡的坡面上。
8、可选地,所述第二机器人朝向所述第一机器人的一侧设置有避让空间。
9、可选地,所述烘干结构还包括风干结构,所述风干结构包括第一风机、第一出风通道和第一出风口,所述第一出风通道连通第一风机与第一出风口,所述第一出风口设置在所述行走坡的坡面上。
10、可选地,所述第一出风通道的体积沿其内部空气的流动方向逐渐缩小。
11、可选地,所述行走坡为中空结构,所述第一出风通道设置于所述行走坡内,紧贴所述行走坡的坡面设置。
12、可选地,所述风干结构还包括第二出风通道和第二出风口,所述第二出风通道连通所述第一风机和第二出风口,所述第二出风口设置在所述行走坡的底部。
13、可选地,所述风干结构还包括第二风机、第二出风通道和第二出风口,所述第二出风口连通所述第二风机和第二出风口。
14、可选地,所述第一机器人的状况包括所述清洁件的湿度、清洁度、清洁时长、清洁故障、所述第一机器人传递给所述第二机器人的信息内容中的任一项或任一组合。
15、可选地,所述第二出风通道设置在所述行走坡内,紧贴所述行走坡的底面设置。
16、可选地,所述第一出风口和所述第二出风口分别设置一个或多个,所述第一出风口设置在所述行走坡的坡面的下部,所述第二出风口设置在所述行走坡的底面的前部。
17、可选地,所述第二出风通道的体积沿其内部空气的流动方向逐渐缩小。
18、可选地,所述第二机器人还包括湿度检测单元,所述湿度检测单元用于检测环境的湿度。
19、可选地,所述第二机器人还包括设置在其底部的行走机构。
20、有益效果:
21、本发明提供的清洁机器人,通过设置根据第一机器人的状况决定是否向第一机器人靠近并具有烘干功能的第二机器人,可对第一机器人进行烘干,避免了第一机器人执行清洁任务后返回过程中其上湿的拖擦布对清洁面造成二次污染,从而影响清洁效果。
22、进一步的,第二机器人还能够在跟随第一机器人运动的过程中对第一机器人拖擦过的清洁面进行烘干,缩短了清洁面晾干的时间,有效防止了因地面湿滑而引起人滑倒,降低了地板面因湿度过大而滋生细菌的可能。
技术特征:
1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述烘干结构配置能用于烘干第一机器人的清洁件。
3.根据权利要求1所述的清洁机器人,其特征在于,所述烘干结构包括行走坡,所述第一机器人可连接在所述行走坡的坡面上。
4.根据权利要求3所述的清洁机器人,其特征在于,所述第二机器人朝向所述第一机器人的一侧设置有避让空间。
5.根据权利要求3所述的清洁机器人,其特征在于,所述烘干结构还包括风干结构,所述风干结构包括第一风机、第一出风通道和第一出风口,所述第一出风通道连通第一风机与第一出风口,所述第一出风口设置在所述行走坡的坡面上。
6.根据权利要求5所述的清洁机器人,其特征在于,所述第一出风通道的体积沿其内部空气的流动方向逐渐缩小。
7.根据权利要求5所述的清洁机器人,其特征在于,所述行走坡为中空结构,所述第一出风通道设置于所述行走坡内,紧贴所述行走坡的坡面设置。
8.根据权利要求5所述的清洁机器人,其特征在于,所述风干结构还包括第二出风通道和第二出风口,所述第二出风通道连通所述第一风机和第二出风口,所述第二出风口设置在所述行走坡的底部。
9.根据权利要求5所述的清洁机器人,其特征在于,所述风干结构还包括第二风机、第二出风通道和第二出风口,所述第二出风口连通所述第二风机和第二出风口。
10.根据权利要求1至9任一项所述的清洁机器人,其特征在于,所述第一机器人的状况包括所述清洁件的湿度、清洁度、清洁时长、清洁故障、所述第一机器人传递给所述第二机器人的信息内容中的任一项或任一组合。
11.根据权利要求8或9所述的清洁机器人,其特征在于,所述第二出风通道设置在所述行走坡内,紧贴所述行走坡的底面设置。
12.根据权利要求5或8或9所述的清洁机器人,其特征在于,所述第一出风口和所述第二出风口分别设置一个或多个,所述第一出风口设置在所述行走坡的坡面的下部,所述第二出风口设置在所述行走坡的底面的前部。
13.根据权利要求9所述的清洁机器人,其特征在于,所述第二出风通道的体积沿其内部空气的流动方向逐渐缩小。
14.根据权利要求1所述的清洁机器人,其特征在于,所述第二机器人还包括湿度检测单元,所述湿度检测单元用于检测环境的湿度。
15.根据权利要求1所述的清洁机器人,其特征在于,所述第二机器人还包括设置在其底部的行走机构。
技术总结
本发明公开了一种清洁机器人,该清洁机器人包括具有拖擦功能的第一机器人以及第二机器人,第二机器人与第一机器人通信连接,可根据第一机器人的状况决定是否向所述第一机器人靠近,第二机器人设有烘干结构,该该烘干结构能用于对靠近或接触所述第二机器人的所述第一机器人烘干;通过第二机器人对第一机器人的跟随工作,能够随时对第一机器人进行烘干,避免了第一机器人返回时潮湿的清洁件造成清洁面的二次污染。
技术研发人员:庞舒婷,汪安然,陈焕松,张万新,叶力荣
受保护的技术使用者:深圳银星智能集团股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!