清洁机器人及其控制方法、装置、系统及存储介质与流程
本申请涉及清洁,尤其涉及一种清洁机器人及其控制方法、装置、系统及存储介质。
背景技术:
1、清洁机器人可用于对地面进行自动清洁,应用场景可以为家庭室内清洁、大型场所清洁等。有些场景的地面上设有地毯,通常对地毯进行清洁和对非地毯区域进行清洁时,清洁机器人的控制方式不同,有时可以设置清洁器人不对地毯进行清洁;但是在清洁机器人不需要对地毯进行清洁时,由于地毯对非地毯区域的分割,容易漏掉对一些非地毯区域的清洁。
技术实现思路
1、本申请提供了一种清洁机器人及其控制方法、装置、系统及存储介质,能够防止清洁机器人对地面进行清洁时漏掉对一些非地毯区域的清洁。
2、第一方面,本申请实施例提供了一种清洁机器人的控制方法,所述方法包括:
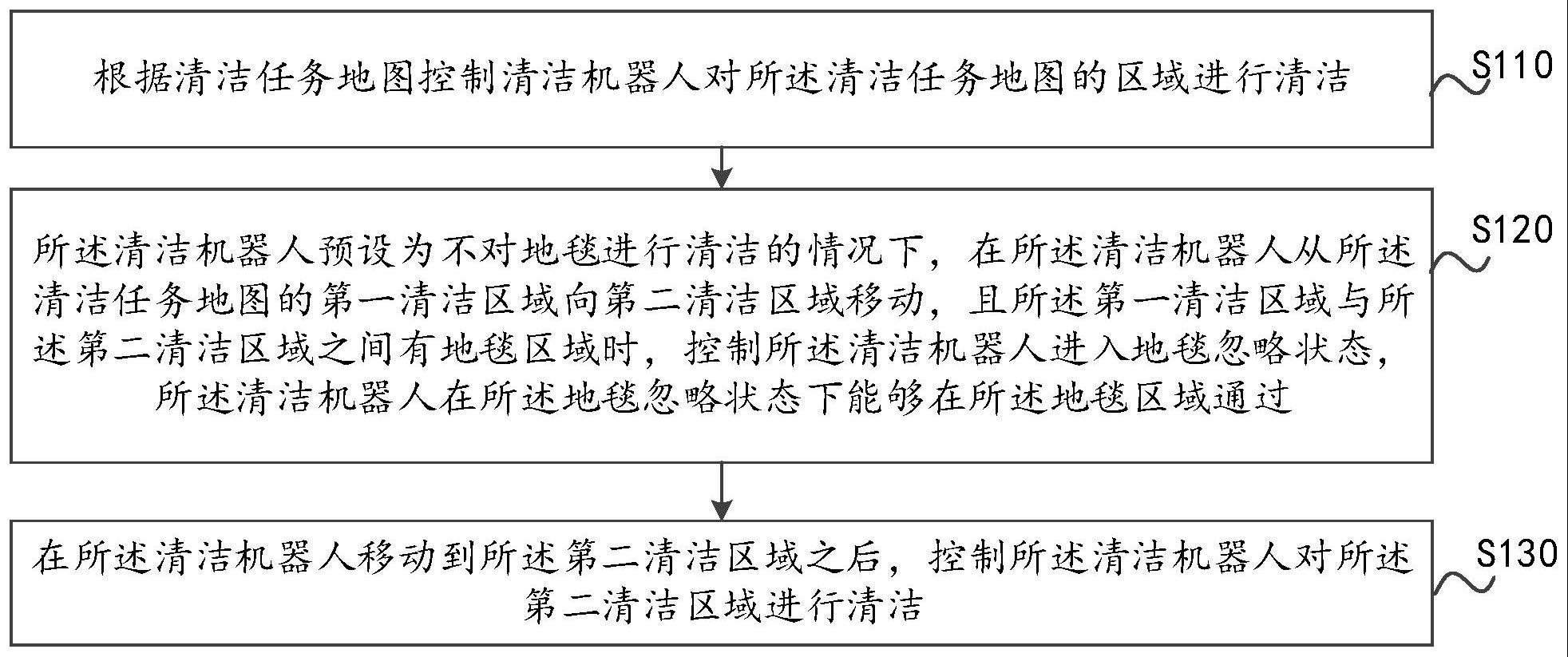
3、根据清洁任务地图控制清洁机器人对所述清洁任务地图的区域进行清洁;
4、所述清洁机器人预设为不对地毯进行清洁的情况下,在所述清洁机器人从所述清洁任务地图的第一清洁区域向第二清洁区域移动,且所述第一清洁区域与所述第二清洁区域之间有地毯区域时,控制所述清洁机器人进入地毯忽略状态,所述清洁机器人在所述地毯忽略状态下能够在所述地毯区域通过;
5、在所述清洁机器人移动到所述第二清洁区域之后,控制所述清洁机器人对所述第二清洁区域进行清洁。
6、第二方面,本申请实施例提供了一种清洁机器人的控制装置,所述控制装置包括存储器和处理器;
7、其中,所述存储器用于存储计算机程序;
8、所述处理器,用于执行所述计算机程序并在执行所述计算机程序时,实现:
9、前述的清洁机器人及其控制方法的步骤。
10、第三方面,本申请实施例提供了一种清洁机器人,所述清洁机器人包括行走单元、清洁件,所述行走单元用于驱动所述清洁机器人运动,所述清洁件用于对地面进行清洁;
11、前述的控制装置。
12、第四方面,本申请实施例提供了一种清洁系统,包括:
13、清洁机器人,所述清洁机器人包括行走单元、清洁件,所述行走单元用于驱动所述清洁机器人运动,所述清洁件用于对地面进行清洁;
14、基站,所述基站用于对所述清洁机器人进行维护;以及
15、前述的控制装置。
16、第五方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述的方法的步骤。
17、本申请实施例提供了一种清洁机器人及其控制方法、装置、系统及存储介质,方法包括:根据清洁任务地图控制清洁机器人对清洁任务地图的区域进行清洁;清洁机器人预设为不对地毯进行清洁的情况下,在清洁机器人从清洁任务地图的第一清洁区域向第二清洁区域移动,且第一清洁区域与第二清洁区域之间有地毯区域时,控制清洁机器人进入地毯忽略状态,清洁机器人在地毯忽略状态下能够在地毯区域通过;在清洁机器人移动到第二清洁区域之后,控制清洁机器人对第二清洁区域进行清洁。通过在清洁机器人预设为不对地毯进行清洁的情况下,当第一清洁区域与第二清洁区域之间有地毯区域时,控制清洁机器人进入地毯忽略状态,使得清洁机器人可以通过地毯从第一清洁区域运动至第二清洁区域,以对第二清洁区域也可以进行清洁,防止漏掉对一些非地毯区域,如第二清洁区域的清洁。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请实施例的公开内容。
技术特征:
1.一种清洁机器人的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的控制方法,其特征在于,所述在所述清洁机器人从所述清洁任务地图的第一清洁区域向第二清洁区域移动,且所述第一清洁区域与所述第二清洁区域之间有地毯区域时,确定所述清洁机器人进入地毯忽略状态,包括:
3.根据权利要求2所述的控制方法,其特征在于,所述在所述清洁机器人移动到所述第二清洁区域之后,控制所述清洁机器人对所述第二清洁区域进行清洁,包括:
4.根据权利要求1所述的控制方法,其特征在于,所述在所述清洁机器人从所述第一清洁区域向所述第二清洁区域移动,且所述第一清洁区域与所述第二清洁区域之间有地毯区域时,确定所述清洁机器人进入地毯忽略状态,包括:
5.根据权利要求4所述的控制方法,其特征在于,所述在所述清洁机器人移动到所述第二清洁区域之后,控制所述清洁机器人对所述第二清洁区域进行清洁,包括:
6.根据权利要求4或5所述的控制方法,其特征在于,所述在所述清洁机器人移动到所述第二清洁区域之后,控制所述清洁机器人对所述第二清洁区域进行清洁,还包括:
7.根据权利要求3或5所述的控制方法,其特征在于,在控制所述清洁机器人进入地毯忽略状态之后,所述方法还包括:
8.根据权利要求7所述的控制方法,其特征在于,所述清洁机器人退出所述地毯忽略状态之后,当检测到所述第二清洁区域中的地毯时,对所述地毯进行规避,以对所述第二清洁区域中的非地毯区域进行清洁。
9.根据权利要求1-5中任一项所述的控制方法,其特征在于,在控制所述清洁机器人进入所述地毯忽略状态时,控制所述清洁机器人至少抬起拖擦件。
10.根据权利要求1-5中任一项所述的控制方法,其特征在于,在控制所述清洁机器人进入地毯忽略状态之后,所述方法还包括:
11.根据权利要求1-5中任一项所述的控制方法,其特征在于,在所述第一清洁区域清洁至少一遍之后,当根据所述清洁任务地图确定还有第二清洁区域未进行清洁时,控制所述清洁机器人从所述第一清洁区域向所述第二清洁区域移动。
12.根据权利要求1-5中任一项所述的控制方法,其特征在于,所述第一清洁区域、所述第二清洁区域为两个相邻的房间中的区域,所述地毯区域在所述两个相邻的房间的出入口处。
13.根据权利要求1-5中任一项所述的控制方法,其特征在于,所述第一清洁区域、所述第二清洁区域为两个不同房间中的区域,且所述两个不同房间之间为走廊,所述地毯区域在所述走廊处。
14.根据权利要求1-5中任一项所述的控制方法,其特征在于,所述第一清洁区域、所述第二清洁区域为同一房间中的不同区域,所述地毯区域将所述房间的区域分割为所述第一清洁区域与所述第二清洁区域。
15.一种清洁机器人的控制装置,其特征在于,所述控制装置包括存储器和处理器;
16.一种清洁机器人,其特征在于,所述清洁机器人包括行走单元、清洁件,所述行走单元用于驱动所述清洁机器人运动,所述清洁件用于对地面进行清洁;
17.一种清洁系统,其特征在于,包括:
18.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现:
技术总结
本申请实施例提供了一种清洁机器人及其控制方法、装置、系统及存储介质,方法包括:控制清洁机器人对清洁任务地图的区域进行清洁;清洁机器人预设为不对地毯进行清洁的情况下,在清洁机器人从第一清洁区域向第二清洁区域移动,且第一清洁区域与第二清洁区域之间有地毯区域时,控制清洁机器人进入地毯忽略状态;在清洁机器人移动到第二清洁区域之后,控制清洁机器人对第二清洁区域进行清洁。通过在清洁机器人预设为不对地毯进行清洁的情况下,当第一清洁区域与第二清洁区域之间有地毯区域时,控制清洁机器人进入地毯忽略状态,使得清洁机器人可以通过地毯从第一清洁区域运动至第二清洁区域,防止漏掉对第二清洁区域的清洁。
技术研发人员:王锦涛
受保护的技术使用者:云鲸智能(深圳)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!