可拆卸拖布的拖地组件及智能清洁机器人的制作方法
本发明涉及智能家电,特别是涉及一种可拆卸拖布的拖地组件及智能清洁机器人。
背景技术:
1、随着科技的发展,越来越多的智能家电走进家庭,如智能清洁机器人、智能空调等。智能清洁机器人集刷扫、吸尘、拖地的功能,以对地板进行清洁。其中,智能清洁机器人采用拖地装置的拖布进行拖地功能,当拖布使用一段时间后续更换,以方便下次有效清洁地面,避免对地板造成二次污染。但目前的智能清洁机器人的拖地装置在更换拖布时,拖布难以从拖地装置上拆卸下来,导致拖布的更换步骤繁琐,更换时间过长,使用不方便,用户的使用体验较差。
技术实现思路
1、本发明的目的是:提供一种可拆卸拖布的拖地组件,以解决现有技术中智能清洁机器人的拖地装置在更换拖布时,拖布难以从拖地装置上拆卸下来,导致拖布的更换步骤繁琐,更换时间过长,使用不方便,用户的使用体验较差的技术问题。
2、为了实现上述目的,本发明第一方面提供了一种可拆卸拖布的拖地组件,其包括:
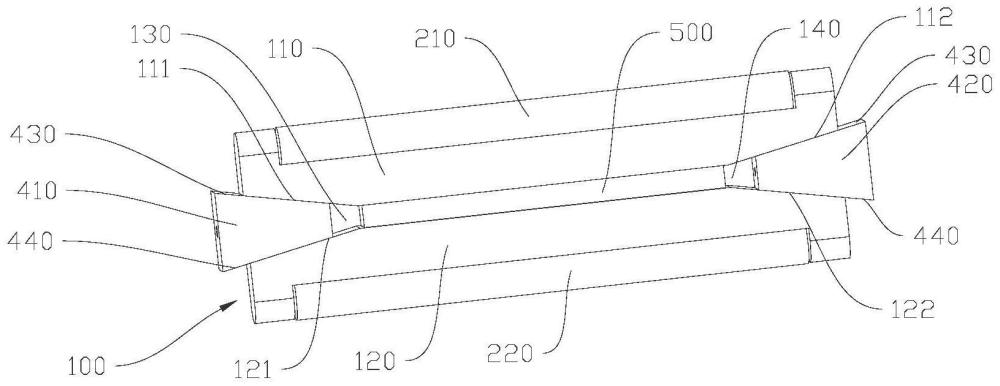
3、拖布支架,其具有第一支架和第二支架;所述第一支架的侧端和第二支架的侧端之间分别具有第一空隙和第二空隙;所述第一空隙和所述第二空隙分别具有第一撑开件和第二撑开件;所述第一撑开件和第二撑开件分别在所述第一空隙和所述第二空隙中移动,以带动所述第一支架和所述第二支架互相远离和靠近。
4、优选地,所述第一撑开件和第二撑开件均包括第一斜面和第二斜面,所述第一斜面的一端靠近第二斜面倾斜以形成所述第一撑开件或第二撑开件的较小端,所述第一斜面的另一端远离所述第二斜面以形成所述第一撑开件或第二撑开件的较大端。
5、优选地,所述较大端朝向所述较小端的方向为前进方向;当所述第一撑开件和第二撑开件前进时,所述第一支架和所述第二支架互相远离;当所述第一撑开件和第二撑开件向后运动时,所述第一支架和第二支架互相靠近。
6、优选地,所述第一支架包括第三斜面和第四斜面,所述第二支架包括第五斜面和第六斜面,所述第三斜面和所述第五斜面之间具有所述第一空隙,所述第四斜面和所述第六斜面之间具有第二空隙。
7、优选地,所述第三斜面和所述第五斜面分别和所述第一撑开件的第一斜面和第二斜面平行滑动,所述第四斜面和所述第六斜面分别和所述第二撑开件的第一斜面和第二斜面平行滑动。
8、优选地,所述第三斜面和所述第五斜面设置有第一导向部,所述第一撑开件的第一斜面和第二斜面设置有与第一导向部相适配的第二导向部;所述第四斜面和所述第六斜面设置有第三导向部,所述第二撑开件的第一斜面和第二斜面设置有与第三导向部相适配的第四导向部。
9、优选地,所述第一支架和/或第二支架设置有第一限位部,所述第一撑开件和/或第二撑开件设置有与所述第一限位部配合的第二限位部;当所述第一支架和所述第二支架互相靠近至第一预定位置时,所述第一限位部和第二限位部配合连接。
10、优选地,所述第一支架和/或第二支架设置有第三限位部,所述第一撑开件和/或第二撑开件设置有与所述第三限位部配合的第四限位部;当所述第一支架和所述第二支架互相远离至第二预定位置时,所述第三限位部和第四限位部配合连接。
11、优选地,还包括:转动组件和拖布;所述转动组件具有主动辊和从动辊;所述主动辊与所述第一支架转动连接,所述从动辊与所述第二支架转动连接,所述拖布绕设在所述主动辊与所述从动辊上。
12、本发明第二方面提供一种智能清洁机器人,其包括上述的可拆卸拖布的拖地组件和底盘,所述可拆卸拖布的拖地组件设置在所述底盘的底部。
13、本发明提供的可拆卸拖布的拖地组件与具有该可拆卸拖布的拖地组件的智能清洁机器人,其有益效果为:第一支架的第一支撑部与第二支架的第二支撑部之间具有第一空隙和第二空隙,通过设置第一撑开件和第二撑开件调节第一空隙和第二空隙的大小,便于调节第一支架的主动辊与第二支架的从动辊之间的距离,方便将拖布支架在撑开状态与缩回状态之间来回切换,方便拖布的拆装,使拖布的更换步骤更简单,减少拖布的更换时间,提高更换效率,使用更方便,提升用户的使用体验。
14、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种可拆卸拖布的拖地组件,其特征在于,包括:
2.根据权利要求1所述的可拆卸拖布的拖地组件,其特征在于,所述第一撑开件和第二撑开件均包括第一斜面和第二斜面,所述第一斜面的一端靠近第二斜面倾斜以形成所述第一撑开件或第二撑开件的较小端,所述第一斜面的另一端远离所述第二斜面以形成所述第一撑开件或第二撑开件的较大端。
3.根据权利要求2所述的可拆卸拖布的拖地组件,其特征在于,所述较大端朝向所述较小端的方向为前进方向;当所述第一撑开件和第二撑开件前进时,所述第一支架和所述第二支架互相远离;当所述第一撑开件和第二撑开件向后运动时,所述第一支架和第二支架互相靠近。
4.根据权利要求3所述的可拆卸拖布的拖地组件,其特征在于,所述第一支架包括第三斜面和第四斜面,所述第二支架包括第五斜面和第六斜面,所述第三斜面和所述第五斜面之间具有所述第一空隙,所述第四斜面和所述第六斜面之间具有第二空隙。
5.根据权利要求4所述的可拆卸拖布的拖地组件,其特征在于,所述第三斜面和所述第五斜面分别和所述第一撑开件的第一斜面和第二斜面平行滑动,所述第四斜面和所述第六斜面分别和所述第二撑开件的第一斜面和第二斜面平行滑动。
6.根据权利要求5所述的可拆卸拖布的拖地组件,其特征在于,所述第三斜面和所述第五斜面设置有第一导向部,所述第一撑开件的第一斜面和第二斜面设置有与第一导向部相适配的第二导向部;所述第四斜面和所述第六斜面设置有第三导向部,所述第二撑开件的第一斜面和第二斜面设置有与第三导向部相适配的第四导向部。
7.根据权利要求1所述的可拆卸拖布的拖地组件,其特征在于,所述第一支架和/或第二支架设置有第一限位部,所述第一撑开件和/或第二撑开件设置有与所述第一限位部配合的第二限位部;当所述第一支架和所述第二支架互相靠近至第一预定位置时,所述第一限位部和第二限位部配合连接。
8.根据权利要求1所述的可拆卸拖布的拖地组件,其特征在于,所述第一支架和/或第二支架设置有第三限位部,所述第一撑开件和/或第二撑开件设置有与所述第三限位部配合的第四限位部;当所述第一支架和所述第二支架互相远离至第二预定位置时,所述第三限位部和第四限位部配合连接。
9.根据权利要求1所述的可拆卸拖布的拖地组件,其特征在于,还包括:转动组件和拖布;所述转动组件具有主动辊和从动辊;所述主动辊与所述第一支架转动连接,所述从动辊与所述第二支架转动连接,所述拖布绕设在所述主动辊与所述从动辊上。
10.一种智能清洁机器人,其特征在于,包括:底盘、如权利要求1至9任一项所述的可拆卸拖布的拖地组件;所述可拆卸拖布的拖地组件设置在所述底盘的底部。
技术总结
本发明属于智能家电技术领域,具体公开了可拆卸拖布的拖地组件及智能清洁机器人,其中拖地组件包括:拖布支架;具有第一支架和第二支架;第一支架的侧端和第二支架的侧端之间分别具有第一空隙和第二空隙;第一空隙和第二空隙分别具有第一撑开件和第二撑开件;第一撑开件和第二撑开件分别在第一空隙和第二空隙中移动,以带动第一支架和第二支架互相远离和靠近。通过设置第一撑开件和第二撑开件调节第一空隙和第二空隙的大小,便于调节第一支架与第二支架之间的距离,方便将拖布支架在撑开状态与缩回状态之间来回切换,方便拖布的拆装,使拖布的更换步骤更简单,减少拖布的更换时间,提高更换效率,使用更方便,提升用户的使用体验。
技术研发人员:陈爱雄
受保护的技术使用者:深圳甲壳虫智能有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!