一种清洁机器人及其清洁方法与流程
本申请涉及家用电器,具体涉及一种清洁机器人及其清洁方法。
背景技术:
1、目前,一些型号的清洁机器人具有湿拖功能,在进行湿拖时,清洁机器人需要给拖地组件供水,以使拖地组件湿润而实现对地板的湿拖。但是,当湿拖功能长期未使用且当下需要使用时,由于向拖地组件供水的供水管路内存在气体且为负压状态,所以在湿拖开始时存在水无法及时供应给拖地组件的问题,导致湿拖开始时出现湿拖效果差、清洁不充分的现象,而且也容易使用户产生湿拖功能异常的误判,给用户带来了不良的使用体验。
技术实现思路
1、有鉴于此,本申请提供了一种清洁机器人及其清洁方法,其能够优化湿拖效果,令用户具有更加良好的使用体验。
2、为了达到上述目的,本申请提供如下技术方案:
3、一种清洁机器人的清洁方法,所述清洁机器人具有拖地组件、水箱、连接所述拖地组件和所述水箱的供水管路,以及将所述水箱的水泵入所述供水管路的水泵,所述清洁方法包括:
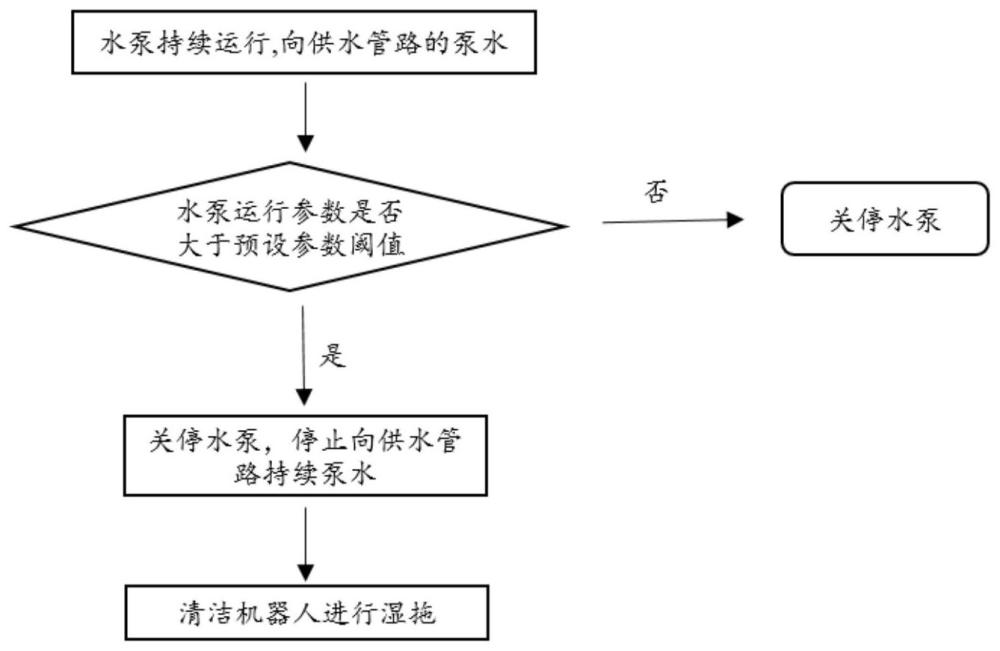
4、执行湿拖任务前,启动设置于所述供水管路的所述水泵,控制所述水泵处于持续运行状态,以将所述水箱中的水泵入供水管路;
5、对所述水泵的运行参数进行实时检测,在所述运行参数大于预设参数阈值时,关停所述水泵,以停止向所述供水管路持续泵水;
6、依据预设的运行逻辑对工作区域进行湿拖。
7、作为本发明的进一步改进,所述供水管路包括连接所述水泵与所述水箱的第一供水管路,以及连接所述水泵与所述拖地组件的第二供水管路;所述预设参数阈值与所述水泵的预设状态相匹配,所述水泵的预设状态为所述水箱中的水充满所述第一供水管路并进入所述水泵的状态。
8、作为本发明的进一步改进,所述清洁方法还包括当所述水泵的持续运行时间大于所述预设时间阈值时,发出第一报警信号,并停止执行后续的所述湿拖。
9、作为本发明的进一步改进,所述清洁机器人还包括设置在所述水箱内的水量检测部件,所述水量检测部件对所述水箱内的水量进行检测;当所述水泵的持续运行时间大于预设时间阈值,且所述水量检测部件检测到所述水箱内有水时,发出第二报警信号,并停止执行后续的所述湿拖。
10、作为本发明的进一步改进,所述清洁方法还包括在执行所述湿拖任务时,实时检测所述水泵的运行参数,在所述运行参数小于等于预设参数阈值时,停止所述湿拖,并返回初始位置。
11、作为本发明的进一步改进,所述水泵为所述供水管路持续泵水至所述运行参数大于所述预设参数阈值结束后,所述清洁机器人直接依据预设的运行逻辑对工作区域进行所述湿拖;或者。
12、作为本发明的进一步改进,在所述水箱补水结束后和/或所述清洁机器人停靠在初始位置时,控制所述清洁机器人在原地通过所述水泵为所述供水管路持续泵水,至所述运行参数大于所述预设参数阈值,所述清洁机器人依据预设的运行逻辑对工作区域进行所述湿拖。
13、作为本发明的进一步改进,在所述清洁机器人依据预设的清洁逻辑执行吸尘、干拖任务的同时,启动所述水泵持续为所述供水管路泵水至所述运行参数大于预设参数阈值,暂停所述水泵的运行;在所述清洁机器人完成所述吸尘、干拖任务后,依据预设的运行逻辑对工作区域进行湿拖。
14、一种清洁机器人,适用于前述的清洁方法,包括:
15、水箱,被配置为存储水;
16、供水管路,与所述水箱连通,并被配置为导出所述水箱内的水;
17、拖地组件,被配置为对地板进行湿拖;
18、水泵,设置于所述供水管路,并被配置为将所述水箱的水泵入所述供水管路;
19、参数检测部件,与所述清洁机器人的控制器电连接,并被配置为检测所述水泵的运行参数;
20、控制组件,用于接收所述参数检测部件传递的运行参数,并执行所述清洁方法,控制所述清洁机器人的运行。
21、作为本发明的进一步改进,所述清洁机器人包括设置在所述水箱内的水量检测部件,所述水量检测部件为霍尔传感器、光电传感器、电容传感器或超声波液位传感器。
22、本申请提供的清洁机器人的清洁方法,在清洁机器人进行湿拖之前,先对供水管路进行预排空操作,即在湿拖开始前,先启动设置于供水管路的水泵,并使水泵处于持续运行状态,以将水箱中的水泵入供水管路中,在此泵入过程中,供水管路中的气体会被排出供水管路,并且在水泵持续运行时还对水泵的运行参数进行实时检测,当检测到运行参数大于预设参数阈值时,则表明水已经充满供水管路,气体已经被排空,此时则可以关停水泵以结束预排空操作,之后清洁机器人就可以依据预设的运行逻辑对地板进行湿拖;从而在后续湿拖开始时,能够使水及时供给拖地组件,防止湿拖初期由于拖地组件湿润不及时、不充分而出现部分地板区域清洁效果差的情况,不仅令清洁机器人的湿拖效果得到了提升,而且也能够避免用户对湿拖功能异常的误判,令用户可以具有更加良好的使用体验。
技术特征:
1.一种清洁机器人的清洁方法,其特征在于,所述清洁机器人具有拖地组件、水箱、连接所述拖地组件和所述水箱的供水管路,以及将所述水箱的水泵入所述供水管路的水泵,所述清洁方法包括:
2.根据权利要求1所述的清洁方法,其特征在于,所述供水管路包括连接所述水泵与所述水箱的第一供水管路,以及连接所述水泵与所述拖地组件的第二供水管路;所述预设参数阈值与所述水泵的预设状态相匹配,所述水泵的预设状态为所述水箱中的水充满所述第一供水管路并进入所述水泵的状态。
3.根据权利要求1所述的清洁方法,其特征在于,所述清洁方法还包括当所述水泵的持续运行时间大于所述预设时间阈值时,发出第一报警信号,并停止执行后续的所述湿拖。
4.根据权利要求1所述的清洁方法,其特征在于,所述清洁机器人还包括设置在所述水箱内的水量检测部件,所述水量检测部件对所述水箱内的水量进行检测;当所述水泵的持续运行时间大于预设时间阈值,且所述水量检测部件检测到所述水箱内有水时,发出第二报警信号,并停止执行后续的所述湿拖。
5.根据权利要求1所述的清洁方法,其特征在于,所述清洁方法还包括在执行所述湿拖任务时,实时检测所述水泵的运行参数,在所述运行参数小于等于预设参数阈值时,停止所述湿拖,并返回初始位置。
6.根据权利要求1所述的清洁方法,其特征在于,所述水泵为所述供水管路持续泵水至所述运行参数大于所述预设参数阈值,所述清洁机器人直接依据预设的运行逻辑对工作区域进行所述湿拖。
7.根据权利要求6所述的清洁方法,其特征在于,在所述水箱补水结束后和/或所述清洁机器人停靠在初始位置时,控制所述清洁机器人在原地通过所述水泵为所述供水管路持续泵水,至所述运行参数大于所述预设参数阈值,所述清洁机器人依据预设的运行逻辑对工作区域进行所述湿拖。
8.根据权利要求1所述的清洁方法,其特征在于,在所述清洁机器人依据预设的清洁逻辑执行吸尘、干拖任务的同时,启动所述水泵持续为所述供水管路泵水至所述运行参数大于预设参数阈值,暂停所述水泵的运行;在所述清洁机器人完成所述吸尘、干拖任务后,依据预设的运行逻辑对工作区域进行湿拖。
9.一种清洁机器人,其特征在于,适用于权利要求1-8中任一项所述的清洁方法,包括:
10.根据权利要求9所述的清洁机器人,其特征在于,所述清洁机器人包括设置在所述水箱内的水量检测部件,所述水量检测部件为霍尔传感器、光电传感器、电容传感器或超声波液位传感器。
技术总结
本申请提供了一种清洁机器人及其清洁方法,清洁方法包括:执行湿拖任务前启动设置于供水管路的水泵,控制水泵处于持续运行状态,以将水从水箱泵入供水管路;对水泵的运行参数进行实时检测,在运行参数大于预设参数阈值时,关停水泵以停止泵水;依据预设的运行逻辑对工作区域进行湿拖。本申请的清洁机器人在执行湿拖任务之前,专门增设了对供水管路进行预排空的操作步骤,即在开始湿拖之前,先开启水泵使其抽吸水箱中的水进入到供水管路中,然后在执行湿拖任务时就能使水及时供应给拖地组件,如此既提升了清洁机器人的湿拖效果,而且也能避免在湿拖初期因拖地组件上无水或水少而导致用户误判湿拖功能异常,令用户具有更加良好的使用体验。
技术研发人员:于驰,张士松,钟红风
受保护的技术使用者:苏州宝时得电动工具有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!