用于玻璃幕墙表面自动清洁的爬壁机器人
【】本发明涉及机器人,特别涉及用于玻璃幕墙表面自动清洁的爬壁机器人。
背景技术
0、
背景技术:
1、随着社会的发展与科学技术的进步,高层建筑高度不断增高,数量也不断增加,玻璃幕墙因其独特的功能性也被越来越多地应用于高层建筑的外墙,玻璃幕墙的清洗是一个很重要的保养工作。传统清洗方式为人工清洗,由工人乘坐升降装置进行清洗,或采用电缆从楼顶将机器下放,工作效率偏低,危险性高。
技术实现思路
0、
技术实现要素:
1、为了克服上述问题,本发明提出一种可有效解决上述问题的用于玻璃幕墙表面自动清洁的爬壁机器人。
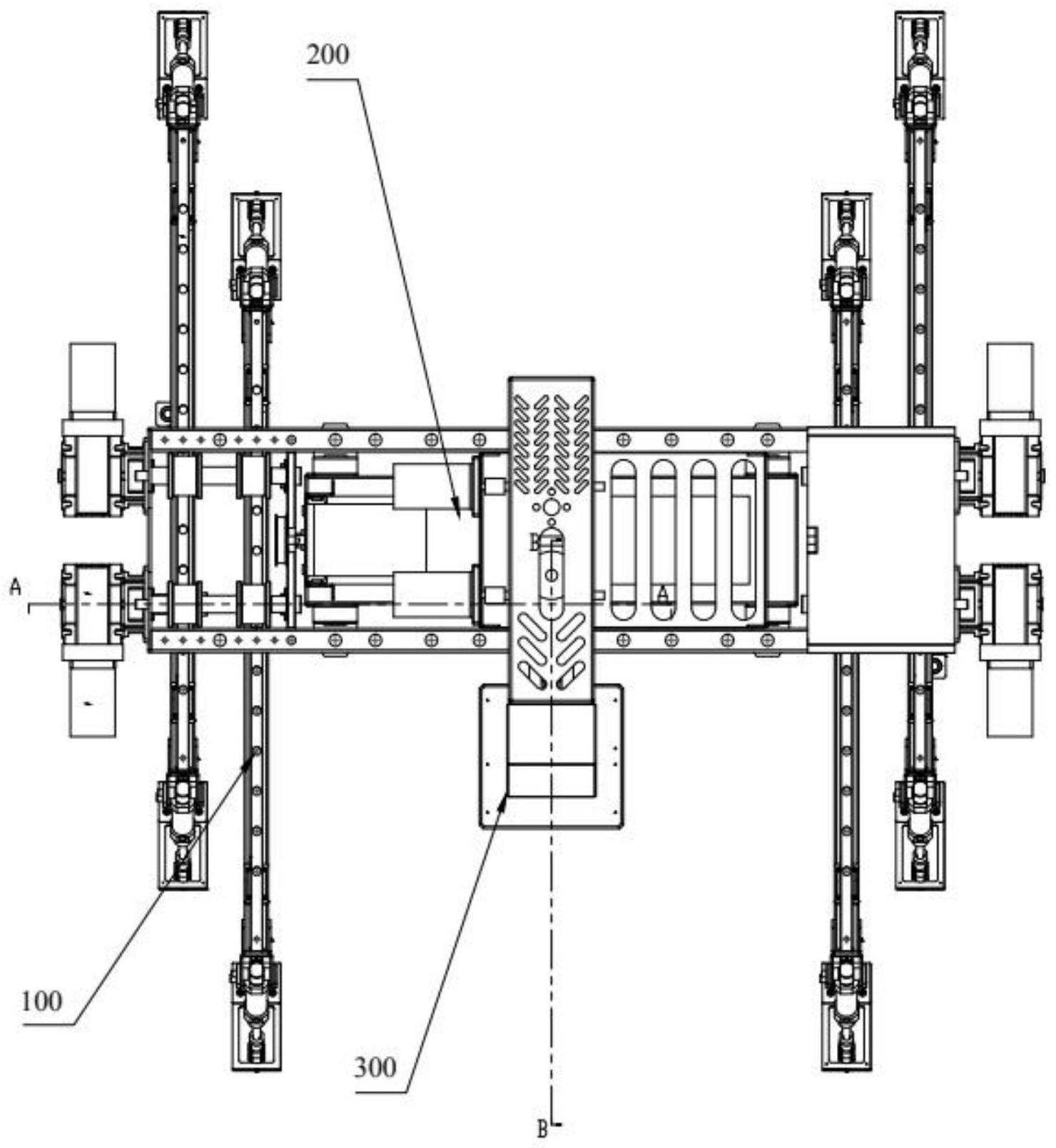
2、本发明解决上述技术问题提供的一种技术方案是:提供一种用于玻璃幕墙表面自动清洁的爬壁机器人,包括行走机构、升降机构、转动机构和清洗机构,所述行走机构用于控制机器人直线移动和吸附固定墙面,所述升降机构设置于行走机构上,所述转动机构和清洗机构分别连接于升降机构,所述升降机构控制转动机构和清洗机构升降运动,所述转动机构控制机器人转向,所述清洗机构用于对墙面进行清洗;所述行走机构包括一支撑桁架,所述支撑桁架的两侧分别平行设置有两条移动臂,所述移动臂的两端分别设置有行走吸附块,所述行走吸附块用于吸附固定墙面;所述转动机构包括转动吸附块,所述转动吸附块吸附固定墙面后对机器人进行转向;所述清洗机构包括清洗基座,所述清洗基座的底部通过清洗转轴轴接有清洗滚筒。
3、优选地,所述支撑桁架的两侧分别设置有两个行走驱动电机,每一行走驱动电机驱动一条移动臂的移动;所述行走驱动电机的输出端连接有驱动齿轮,所述移动臂上设置有齿条,所述驱动齿轮与齿条啮合。
4、优选地,所述支撑桁架上设置有导轮,所述导轮设置于每一移动臂的上下两侧,并且导轮与移动臂的上下两侧均接触。
5、优选地,所述移动臂的端部固定有工字安装板,所述工字安装板的上端铰接有行走控制气缸,所述行走控制气缸上端与工字安装板的上端铰接,所述行走控制气缸的输出端与行走吸附块的上侧一端铰接;所述工字安装板的下端铰接有一转动控制板,所述转动控制板的底部固定于行走吸附块的上侧另一端。
6、优选地,所述行走吸附块的底部设置有仿生材料和真空吸盘。
7、优选地,所述转动机构包括转动驱动电机,所述转动驱动电机的一侧固定有连接架,所述连接架连接于升降机构的升降端,升降机构通过控制连接架升降从而控制转动驱动电机升降,所述转动吸附块连接于转动驱动电机的输出端。
8、优选地,所述连接架呈门字形,连接架的内部设置有升降空间,所述清洗机构设置于升降空间内,所述清洗机构距离升降空间的顶部和底部至少200mm距离。
9、优选地,所述连接架的内侧相对两边设置有定位伸缩杆,所述两边的定位伸缩杆相向设置,所述清洗机构的相对两侧分别设置有定位连杆,所述定位连杆开设有与定位伸缩杆相匹配的定位槽。
10、优选地,所述清洗转轴的一端连接有第一清洗同步轮,所述清洗基座上固定有清洗驱动电机,所述清洗驱动电机的输出端连接有第二清洗同步轮,所述第二清洗同步轮与第一清洗同步轮通过清洗同步带传动。
11、优选地,所述升降机构由两个直流电机分别驱动两套swl0.5m-1a型蜗轮蜗杆升降器升降。
12、与现有技术相比,本发明的用于玻璃幕墙表面自动清洁的爬壁机器人采用多足式行走方式,四条移动臂,两两移动,交替前行,实现机器人的直线运动,配合转动电机和吸附块实现的转动,可实现二维平面内的运动;采用地面供电,地面提供压缩空气的方式,以减轻机器人的重量,提高工作效率及可靠性;清洗机构采用直流电机驱动的滚筒毛刷,且滚筒表面可加装不同材质的清洗工具,如毛刷、绒布等,以适应不同的工作需求;该机器人可实现在水平面或者垂直表面上二维空间内的移动,保证了工作范围的覆盖率,可高效替代人工完成危险的高空玻璃幕墙清洗工作,降低安全隐患。
技术特征:
1.用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,包括行走机构、升降机构、转动机构和清洗机构,所述行走机构用于控制机器人直线移动和吸附固定墙面,所述升降机构设置于行走机构上,所述转动机构和清洗机构分别连接于升降机构,所述升降机构控制转动机构和清洗机构升降运动,所述转动机构控制机器人转向,所述清洗机构用于对墙面进行清洗;
2.如权利要求1所述的用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,所述支撑桁架的两侧分别设置有两个行走驱动电机,每一行走驱动电机驱动一条移动臂的移动;所述行走驱动电机的输出端连接有驱动齿轮,所述移动臂上设置有齿条,所述驱动齿轮与齿条啮合。
3.如权利要求1所述的用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,所述支撑桁架上设置有导轮,所述导轮设置于每一移动臂的上下两侧,并且导轮与移动臂的上下两侧均接触。
4.如权利要求1所述的用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,所述移动臂的端部固定有工字安装板,所述工字安装板的上端铰接有行走控制气缸,所述行走控制气缸上端与工字安装板的上端铰接,所述行走控制气缸的输出端与行走吸附块的上侧一端铰接;所述工字安装板的下端铰接有一转动控制板,所述转动控制板的底部固定于行走吸附块的上侧另一端。
5.如权利要求1所述的用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,所述行走吸附块的底部设置有仿生材料和真空吸盘。
6.如权利要求1所述的用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,所述转动机构包括转动驱动电机,所述转动驱动电机的一侧固定有连接架,所述连接架连接于升降机构的升降端,升降机构通过控制连接架升降从而控制转动驱动电机升降,所述转动吸附块连接于转动驱动电机的输出端。
7.如权利要求6所述的用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,所述连接架呈门字形,连接架的内部设置有升降空间,所述清洗机构设置于升降空间内,所述清洗机构距离升降空间的顶部和底部至少200mm距离。
8.如权利要求7所述的用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,所述连接架的内侧相对两边设置有定位伸缩杆,所述两边的定位伸缩杆相向设置,所述清洗机构的相对两侧分别设置有定位连杆,所述定位连杆开设有与定位伸缩杆相匹配的定位槽。
9.如权利要求1所述的用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,所述清洗转轴的一端连接有第一清洗同步轮,所述清洗基座上固定有清洗驱动电机,所述清洗驱动电机的输出端连接有第二清洗同步轮,所述第二清洗同步轮与第一清洗同步轮通过清洗同步带传动。
10.如权利要求1所述的用于玻璃幕墙表面自动清洁的爬壁机器人,其特征在于,所述升降机构由两个直流电机分别驱动两套swl0.5m-1a型蜗轮蜗杆升降器升降。
技术总结
本发明涉及机器人技术领域,特别涉及用于玻璃幕墙表面自动清洁的爬壁机器人,行走机构用于控制机器人直线移动和吸附固定墙面,升降机构设置于行走机构上,转动机构和清洗机构分别连接于升降机构,升降机构控制转动机构和清洗机构升降运动,转动机构控制机器人转向,清洗机构用于对墙面进行清洗,行走机构包括一支撑桁架,支撑桁架的两侧分别平行设置有两条移动臂,移动臂的两端分别设置有行走吸附块,行走吸附块用于吸附固定墙面。与现有技术相比,本发明的用于玻璃幕墙表面自动清洁的爬壁机器人可实现在水平面或者垂直表面上二维空间内的移动,保证了工作范围的覆盖率,可高效替代人工完成危险的高空玻璃幕墙清洗工作,降低安全隐患。
技术研发人员:李永红,吴险峰
受保护的技术使用者:深圳信息职业技术学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!