清洁机器人基站及机器人清洁系统的制作方法
本技术涉及一种清洁机器人基站及机器人清洁系统,属于小型家电设备。
背景技术:
1、随着科技的发展,机器人在我们的生活中扮演者愈发重要的作用,尤其是家用机器人,帮助人们从繁重的家务中解放出来,其中,清洁机器人由于适用性比较广泛而受到用户的广泛青睐。
2、现有的清洁机器人能够自主行走,在执行工作时,无需人为直接控制和操作,并且还具有路径规划、自动避障、人机交互、回归充电等功能,能够解决人们日常清扫地面的需求。清洁机器人基站与清洁机器人配合,实现清洁机器人回归充电及给机器人更换拖地模块等功能。现有的清洁机器人在到达清洁机器人基站后,清洁机器人基站通过传递装置将拖地模块移动以使存储单元中的拖地模块传递至清洁机器人和/或将从清洁机器人上分离的拖地模块传递给存储单元。
3、现有的传递装置包括用以承托拖地模块的托盘和固定托盘并驱动该托盘向下移动的升降机构。当异物(如手或小动物)伸入至传递装置的行走路径上时,升降机构驱动托盘向上或向下移动,而若需使得托盘在中途停止移动,则只有当托盘所受到的阻力大于传递装置时,触发传递装置的升降电机启动堵转保护,该传递装置才停止运行,而此时,异物处于被托盘与地面或上梁的夹持状态,异物将受到夹持力而变形或受伤。
技术实现思路
1、本实用新型的目的在于提供一种可提高安全性能的清洁机器人基站。
2、为达到上述目的,本实用新型提供如下技术方案:一种清洁机器人基站包括:
3、基座,
4、收容腔,至少部分收容清洁机器人;
5、传递装置,于第一位置、第二位置之间传递所述清洁机器人的拖地模块;
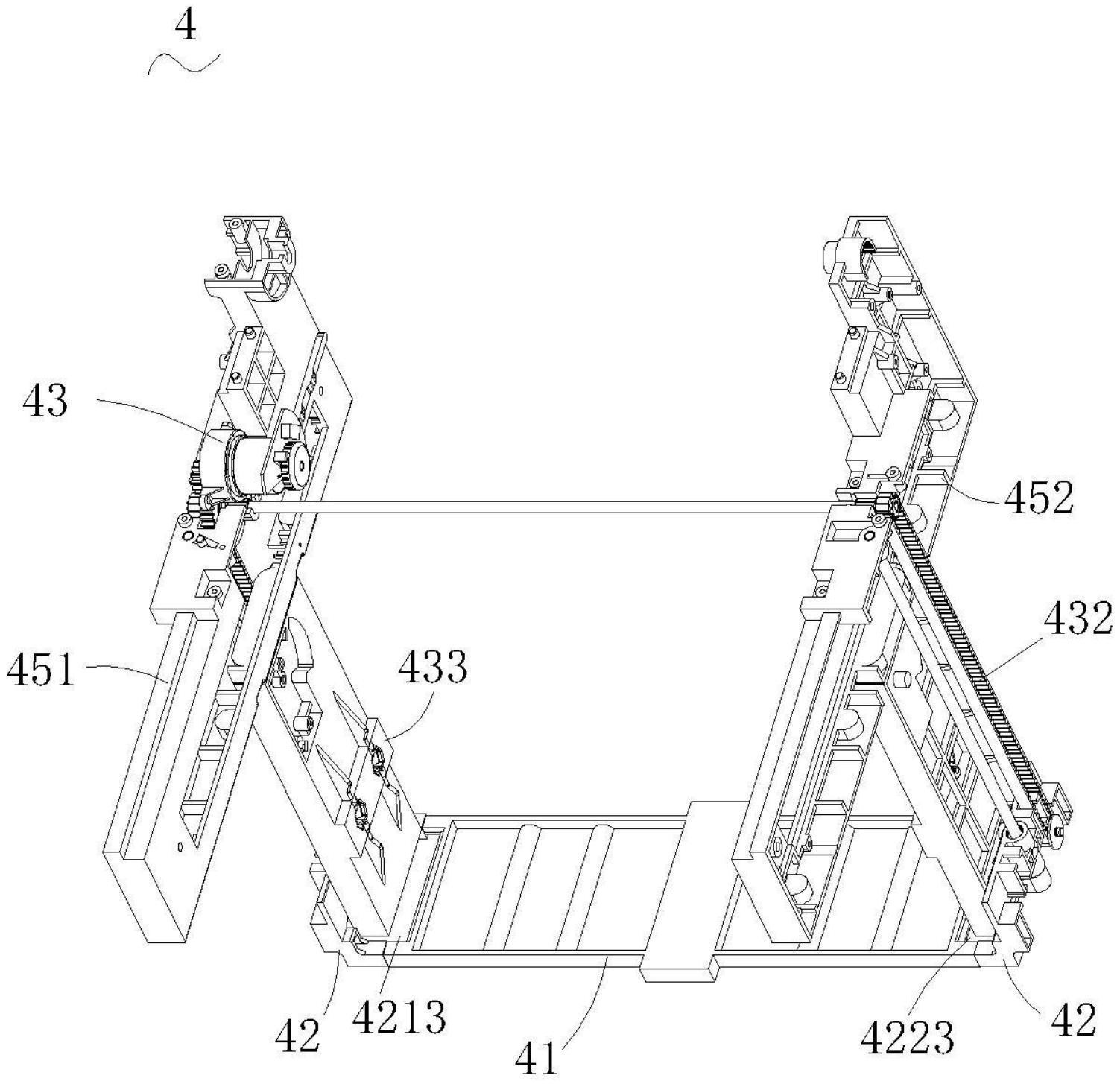
6、其中,所述传递装置包括用以承托拖地模块的托板、相对安装在所述托板两侧的两个导向板以及驱动所述导向板于所述基座的高度方向移动的升降装置,所述第一位置和第二位置沿基站的高度方向设置,所述托板与至少其中一个所述导向板之间为可拆卸连接,在所述托板受外力作用后,外力推动所述托板与至少其中一个所述导向板脱离。
7、进一步地,所述托板具有与所述导向板脱离的活动端和与所述导向板连接的衔接端,在所述外力的作用下,所述托板以衔接端为旋转中心转动。
8、进一步地,所述托板具有分别与两个所述导向板均脱离的第一活动端和第二活动端,在所述外力的作用下,所述托板相对导向板移动或转动。
9、进一步地,所述托板与导向板之一上设置有磁性件,另一上设置有与所述磁性件实现磁性连接的金属件。
10、进一步地,所述托板和导向板内设置有用以嵌入磁性件或金属件的嵌入槽。
11、进一步地,所述托板与导向板上分别设置有相互配合的磁性件。
12、进一步地,所述磁性件嵌入在所述托板和导向板内。
13、进一步地,所述托板与导向板之间设置有驱动所述托板与导向板对接的复位件。
14、进一步地,所述清洁机器人基站包括功能模块,位于所述基座上方,且用于执行预设功能;所述清洁机器人基站还包括设置在所述基座内以感应清洁机器人的信号感应器和与所述信号感应器信号连接的控制单元;所述功能模块包括用以收容拖地模块的存储单元,所述控制单元控制所述传递装置将存储单元中的拖地模块传递至所述清洁机器人和/或将从清洁机器人上分离的拖地模块传递至存储单元。
15、本实用新型还提供了一种机器人清洁系统,包括可实现拖地模式和/或扫地模式的清洁机器人和供所述清洁机器人停泊的上述清洁机器人基站。
16、本实用新型的有益效果在于:本申请中清洁机器人基站的将托板与至少其中一个导向板设置为可拆卸连接,在托板受外力作用后(如遇障碍物后),外力可推动托板与其中至少一个导向板脱离,以使得托板可在外力的作用下移动,提高了安全性能,特别是,由于托板可在障碍物的作用下与导向板分离,从而可防止障碍物被托板压迫,以避免夹伤事故的发生。
17、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种清洁机器人基站,其特征在于,包括
2.如权利要求1所述的清洁机器人基站,其特征在于,所述托板具有与所述导向板脱离的活动端和与所述导向板连接的衔接端,在所述外力的作用下,所述托板以衔接端为旋转中心转动。
3.如权利要求1所述的清洁机器人基站,其特征在于,所述托板具有分别与两个所述导向板均脱离的第一活动端和第二活动端,在所述外力的作用下,所述托板相对导向板移动或转动。
4.如权利要求1所述的清洁机器人基站,其特征在于,所述托板与导向板之一上设置有磁性件,另一上设置有与所述磁性件实现磁性连接的金属件。
5.如权利要求4所述的清洁机器人基站,其特征在于,所述托板和导向板内设置有用以嵌入磁性件或金属件的嵌入槽。
6.如权利要求1所述的清洁机器人基站,其特征在于,所述托板与导向板上分别设置有相互配合的磁性件。
7.如权利要求6所述的清洁机器人基站,其特征在于,所述磁性件嵌入在所述托板和导向板内。
8.如权利要求4至7项中任一项所述的清洁机器人基站,其特征在于,所述托板与导向板之间设置有驱动所述托板与导向板对接的复位件。
9.如权利要求1所述的清洁机器人基站,其特征在于,所述清洁机器人基站包括功能模块,位于所述基座上方,且用于执行预设功能;所述清洁机器人基站还包括设置在所述基座内以感应清洁机器人的信号感应器和与所述信号感应器信号连接的控制单元;所述功能模块包括用以收容拖地模块的存储单元,所述控制单元控制所述传递装置将存储单元中的拖地模块传递至所述清洁机器人和/或将从清洁机器人上分离的拖地模块传递至存储单元。
10.一种机器人清洁系统,其特征在于,包括可实现拖地模式和/或扫地模式的清洁机器人和供所述清洁机器人停泊的如权利要求1至9项中任一项所述的清洁机器人基站。
技术总结
本技术涉及一种清洁机器人基站及机器人清洁系统,属于小型家电设备,该清洁机器人基站将托板与至少其中一个导向板设置为可拆卸连接,在托板受外力作用后(如遇障碍物后),外力可推动托板与其中至少一个导向板脱离,以使得托板可在外力的作用下移动,提高了安全性能,特别是,由于托板可在障碍物的作用下与导向板分离,从而可防止障碍物被托板压迫,以避免夹伤事故的发生。
技术研发人员:裴续,王彪
受保护的技术使用者:苏州宝时得电动工具有限公司
技术研发日:20220705
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!