移动清洁机器人的制作方法
本技术涉及移动清洁机器人。
背景技术:
1、自主移动机器人包括自主移动清洁机器人,其可以在诸如家庭的环境中自主执行清洁任务。自主清洁机器人可以在地板表面上导航并避开障碍物,同时真空清洁地板表面并操作由机器人携带的可旋转构件以从地板表面吸入碎屑。当机器人在地板表面上移动时,机器人可以旋转可旋转构件,该可旋转构件可以接合碎屑并将碎屑引向由机器人产生的真空气流。可旋转构件和真空气流因此可以协作以允许机器人吸入碎屑。
技术实现思路
1、某些移动清洁机器人可以执行拖地和吸尘操作,其中清洁垫可被添加到移动清洁机器人的底部,并被拖到机器人真空吸尘器的吸尘元件后面。在这种系统中,可能难以在清洁垫上提供适当的重量,并且还难以在清洁头和地板之间提供足够的接触,比如由于机器人部件的公差堆叠。例如,由于制造差异,在一些机器人中,机器人的重量可能主要在脚轮和两个轮上,而没有太多重量在垫上。在这种情况下,垫的清洁效率会受到损害。在另一示例中,同样由于制造差异,机器人重量可能主要在脚轮和垫上,垫上的重量可能太大,这可能降低机器人的移动性,因为垫变得难以沿地板推拉。
2、为了帮助解决上述问题,本公开讨论了包括响应于机器人的操作模式(例如拖地模式或吸尘模式)调节机器人悬架的解决方案,以提供更可靠和更好的清洁。例如,通过在拖地模式期间调节机器人悬架,可以在清洁垫上放置限定量的重量,以允许更有效的清洁。并且当吸尘时,可以调节悬架以在地面和清洁头之间提供良好的接触,从而提供改进的碎屑拾取。
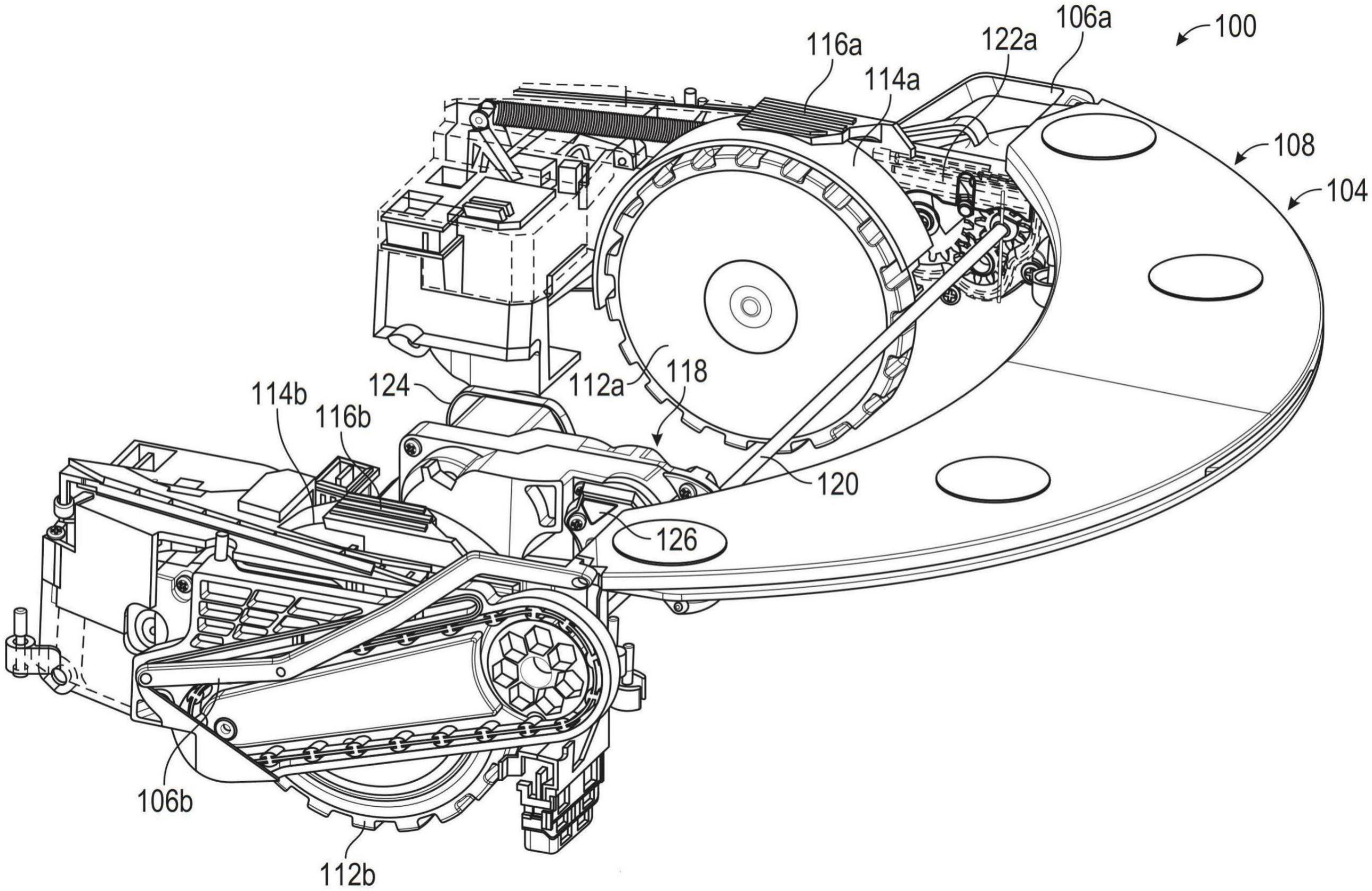
3、根据本实用新型的实施例,公开了一种移动清洁机器人,该移动清洁机器人包括:主体;一对驱动轮,其可操作成在环境中移动移动清洁机器人;以及一对轮止动件,其可相对于主体和驱动轮在停止位置和释放位置之间移动,轮止动件可在停止位置与相应的驱动轮接合,以限制驱动轮相对于主体的竖直行程。
4、根据本实用新型的实施例,移动清洁机器人还包括垫组件,其连接到主体,并且可相对于主体在存储位置和拖地位置之间移动。
5、根据本实用新型的实施例,移动清洁机器人还包括连接到轮止动件的齿轮组件,该齿轮组件可操作成响应于旋转输入而相对于轮平移轮止动件。
6、根据本实用新型的实施例,移动清洁机器人还包括可操作成操作齿轮组件的驱动系统。
7、根据本实用新型的实施例,驱动系统连接到垫组件,并且可操作成在存储位置和拖地位置之间移动垫组件。
8、根据本实用新型的实施例,齿轮组件包括正时机构,用于在垫组件的期望位置移动轮止动件。
9、根据本实用新型的实施例,正时机构配置成在垫组件接合地板表面时或之后开始移动轮止动件。
10、根据本实用新型的实施例,主体包括可与轮止动件的引导件接合的轨道,以限制轮止动件相对于主体和驱动轮的竖直和水平平移。
11、根据本实用新型的实施例,当轮止动件处于停止位置时,轮止动件的底部可与围绕机器人的驱动轮的至少一部分的翼子板接合,并且当轮止动件处于停止位置时,轮止动件的顶部可与主体接合。
12、根据本实用新型的实施例,轮止动件的顶部包括多个肋,当轮止动件处于停止位置时,肋可与主体接合。
技术特征:
1.一种移动清洁机器人,其特征在于,所述移动清洁机器人包括:
2.根据权利要求1所述的移动清洁机器人,其特征在于,所述移动清洁机器人还包括:
3.根据权利要求2所述的移动清洁机器人,其特征在于,所述移动清洁机器人还包括:
4.根据权利要求3所述的移动清洁机器人,其特征在于,所述移动清洁机器人还包括:
5.根据权利要求4所述的移动清洁机器人,其特征在于,所述驱动系统连接到所述垫组件,并且可操作成在所述存储位置和拖地位置之间移动垫组件。
6.根据权利要求5所述的移动清洁机器人,其特征在于,所述齿轮组件包括正时机构,用于在所述垫组件的期望位置移动所述轮止动件。
7.根据权利要求6所述的移动清洁机器人,其特征在于,所述正时机构配置成在所述垫组件接合地板表面时或之后开始移动所述轮止动件。
8.根据权利要求1所述的移动清洁机器人,其特征在于,所述主体包括可与所述轮止动件的引导件接合的轨道,以限制轮止动件相对于所述主体和驱动轮的竖直和水平平移。
9.根据权利要求1所述的移动清洁机器人,其特征在于,当所述轮止动件处于停止位置时,轮止动件的底部可与围绕所述机器人的驱动轮的至少一部分的翼子板接合,并且当轮止动件处于停止位置时,轮止动件的顶部可与所述主体接合。
10.根据权利要求9所述的移动清洁机器人,其特征在于,所述轮止动件的顶部包括多个肋,当轮止动件处于停止位置时,所述肋可与所述主体接合。
技术总结
一种移动清洁机器人可以包括主体、驱动轮和轮止动件。驱动轮可以连接到主体,并且可操作成在环境中移动移动清洁机器人。轮止动件可以相对于主体和驱动轮在停止位置和释放位置之间移动。轮止动件可以在停止位置与驱动轮接合,以限制驱动轮相对于主体的竖直行程。
技术研发人员:T.R.奥姆,E.E.斯特尔茨,R.W.莫林,F.郭
受保护的技术使用者:美国iRobot公司
技术研发日:20220728
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!