一种电机、激光雷达及扫地机器人的制作方法
本技术实施例涉及扫地机器人,特别是涉及一种电机、激光雷达及扫地机器人。
背景技术:
1、扫地机器人在工作过程中,其激光雷达的测距组件需要进行360度旋转,以实现全方位采集信息,测距组件是通过电机的转子转动带动旋转。
2、然而,在实现本实用新型实施例的过程中,发明人发现:目前,转子包括转子骨架和磁环,磁环设置于转子骨架内,但是现有转子骨架是由塑料制作而成的,无导磁性能,以致磁环外圆区域漏磁大,进而导致电机的效率低。
技术实现思路
1、本实用新型实施例主要解决的技术问题是提供一种电机、激光雷达及扫地机器人,能够使磁环外圆区域产生聚磁效应,减少漏磁的情况,提高电机的效率。
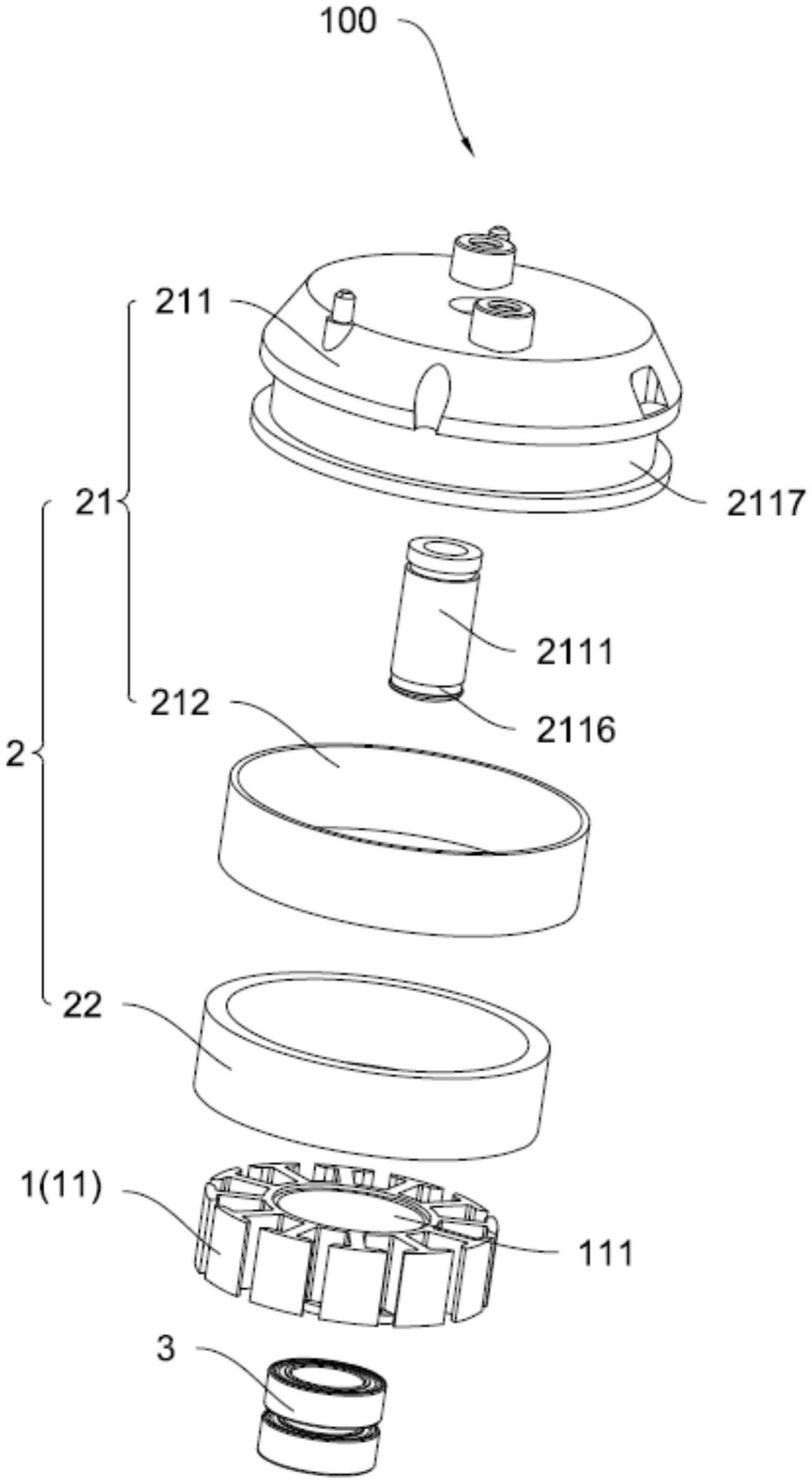
2、为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种电机,包括定子和转子,所述转子包括磁性转子骨架组件和磁环,所述磁性转子骨架组件设置有第一收容槽,所述第一收容槽收容所述定子和磁环,所述磁环套设于所述定子的外侧,所述磁环固定于所述第一收容槽内。能够使磁环外圆区域产生聚磁效应,减少了漏磁,提高电机的效率。
3、可选的,所述磁性转子骨架组件包括非磁性转子骨架和导磁件,所述非磁性转子骨架设置有所述第一收容槽,所述导磁件固定于所述第一收容槽的壁面,并且所述导磁件与所述磁环连接。
4、可选的,所述导磁件采用磁导率高的材料制作而成。
5、可选的,所述磁性转子骨架组件包括磁性转子骨架和隔离层,所述隔离层设置于所述磁性转子骨架的外表面。
6、可选的,所述磁性转子骨架采用磁导率高的材料制作而成,所述磁性转子骨架设置有所述第一收容槽。
7、可选的,所述隔离层采用水溶性树脂制作而成。
8、为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种激光雷达,包括底壳、测距组件和上述电机,其中,所述底壳设置有第二收容槽,所述电机收容于所述第二收容槽,所述测距组件设置在所述电机的磁性转子骨架组件远离所述第二收容槽的底部的一端。
9、可选的,所述激光雷达还包括定子骨架、电路板和螺栓,所述电路板与所述电机的定子电性连接,所述第二收容槽的槽底延伸有固定环,所述定子骨架收容于所述第二收容槽,所述定子骨架设置有螺孔,所述固定环设置有第一通孔,所述第二收容槽的槽底设置有第二通孔,所述电路板设置有第三通孔,所述螺栓依次穿过所述第三通孔、第二通孔和第一通孔螺接于所述螺孔。
10、可选的,所述激光雷达还包括雷达罩,所述雷达罩设置于底壳,所述雷达罩盖罩测距组件,并且所述雷达罩将所述第二收容槽的槽口封闭。
11、为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种扫地机器人,包括上述激光雷达。
12、本实用新型实施例中,电机包括定子和转子,所述转子包括磁性转子骨架组件和磁环,所述磁性转子骨架组件设置有第一收容槽,所述第一收容槽收容所述定子和磁环,所述磁环套设于所述定子的外侧,所述磁环固定于所述第一收容槽内。由于磁性转子骨架组件具有导磁功能,使得磁环外圆区域产生聚磁效应,减少了漏磁,提高电机的效率。
技术特征:
1.一种电机,其特征在于,包括:
2.根据权利要求1所述的电机,其特征在于,
3.根据权利要求2所述的电机,其特征在于,
4.根据权利要求1所述的电机,其特征在于,
5.根据权利要求4所述的电机,其特征在于,
6.根据权利要求4所述的电机,其特征在于,
7.一种激光雷达,其特征在于,包括底壳、测距组件和如权利要求1-6中任意一项所述的电机,所述底壳设置有第二收容槽,所述电机收容于所述第二收容槽,所述测距组件设置在所述电机的磁性转子骨架组件远离所述第二收容槽的底部的一端。
8.根据权利要求7所述的激光雷达,其特征在于,
9.根据权利要求7所述的激光雷达,其特征在于,
10.一种扫地机器人,其特征在于,包括如权利要求7-9中任意一项所述的激光雷达。
技术总结
本技术实施例涉及扫地机器人技术领域,尤其公开了一种电机、激光雷达及扫地机器人,包括定子和转子,所述转子包括磁性转子骨架组件和磁环,所述磁性转子骨架组件设置有第一收容槽,所述第一收容槽收容所述定子和磁环,所述磁环套设于所述定子的外侧,所述磁环固定于所述第一收容槽内。通过上述方式,本技术实施例由于磁性转子骨架组件具有导磁功能,使得磁环外圆区域产生聚磁效应,减少了漏磁,提高电机的效率。
技术研发人员:陈时,曾艳山,邓高文,张元志,段新峰
受保护的技术使用者:深圳市欢创科技有限公司
技术研发日:20221010
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!