一种驱动轮可伸缩的清洁机器人的制作方法
本技术属于清洁机器人,特别是涉及一种驱动轮可伸缩的清洁机器人。
背景技术:
1、清洁机器人是为人类服务的特种机器人,主要从事家庭卫生的清洁、清洗等工作。随着科技的发展以及生活节奏的加快,利用清洁机器人进行环境清洁,不仅能够提高清洁效率,而且能够实现解放双手的目的。因此,目前市面上的清洁机器人备受人们的青睐。
2、现有的清洁机器人一般包括机器人主体、驱动轮以及清洁组件,清洁组件安装于机器主体的底部,驱动轮设置在机器人主体底部两侧,现有的清洁机器人在使用过程中,表面清洁机器人在移动过程中遇到障碍物(比如地毯、线缆等)时,可能会被障碍物托起,使得驱动轮离开地面,表面清洁机器人无法移动,这样会减少清洁机器人的清洁范围,从而降低了清洁机器人的实用性,而且现有的清洁机器人在使用完成后,通常将其放置在室内角落处,当受到外力作用时,清洁机器人会在驱动轮的作用下移动,与墙壁发生碰撞,碰撞时产生的作用力可能导致清洁机器人内部元件受损,为此我们提出一种驱动轮可伸缩的清洁机器人。
技术实现思路
1、本实用新型的目的在于提供一种驱动轮可伸缩的清洁机器人,解决现有的清洁机器人一般包括机器人主体、驱动轮以及清洁组件,清洁组件安装于机器主体的底部,驱动轮设置在机器人主体底部两侧,现有的清洁机器人在使用过程中,表面清洁机器人在移动过程中遇到障碍物(比如地毯、线缆等)时,可能会被障碍物托起,使得驱动轮离开地面,表面清洁机器人无法移动,这样会减少清洁机器人的清洁范围,从而降低了清洁机器人的实用性,而且现有的清洁机器人在使用完成后,通常将其放置在室内角落处,当受到外力作用时,清洁机器人会在驱动轮的作用下移动,与墙壁发生碰撞,碰撞时产生的作用力可能导致清洁机器人内部元件受损,的问题。
2、为解决上述技术问题,本实用新型是通过以下技术方案实现的:
3、本实用新型为一种驱动轮可伸缩的清洁机器人,包括机壳、设置于机壳底部的机架以及设置于机架相对两侧中部位置上的驱动轮,所述机架底部相对两侧边缘位置上均固定连接有固定框,所述固定框与驱动轮之间设置有驱动机构;
4、所述驱动机构包括电机、转轴、调节部件以及定位部件,所述电机设置于固定框内部,所述转轴一端固定连接在电机输出轴末端上,另一端与驱动轮侧面中部位置固定连接;
5、所述调节部件包括设置于固定框内部的第一缓冲装置以及设置于转轴外表面上的第二缓冲装置,所述第一缓冲装置包括滑块以及第一缓冲弹簧,所述滑块活动设置于固定框内部,且所述滑块内部设置有安装槽,所述电机外壳表面固定设置于安装槽槽壁上,所述第一缓冲弹簧两端分别固定设置在固定框内侧顶面以及滑块顶部上;
6、所述第二缓冲装置包括支撑板、滑套、筒体、直线轴承、导向杆以及第二缓冲弹簧,所述支撑板呈l形结构,且一端固定连接在机架外侧面中部位置上,所述支撑板l形竖直边上设置有活动槽,所述滑套活动设置于活动槽内部,且所述转轴外表面与滑套内圈侧面固定连接,所述筒体底端与滑套顶部固定连接,所述直线轴承设置于筒体内部,且外圈一端与筒体顶部固定连接,所述导向杆一端设置在筒体内部,另一端贯穿筒体顶部,且固定设置在活动槽槽顶上,且所述直线轴承内圈与导向杆外表面活动连接,所述第二缓冲弹簧设置于导向杆外周面上,且两端分别固定设置于活动槽槽顶以及筒体顶部上;
7、所述定位部件包括液压杆、定位套以及轴套,所述液压杆固定端固定设置在支撑板l形横边底部上,所述定位套顶部与液压杆输出端固定连接,所述轴套内圈与转轴外表面固定连接,且位于支撑板与固定框之间,所述轴套外周面上等距设置有若干个凸起,所述定位套底部设置有若干个凹槽,且凹槽与凸起相匹配。
8、优选地,所述机架底部前侧中部位置上活动设置有转向轮,所述机架底部后侧相对两侧均活动设置有导向轮,所述转向轮底部与导向轮底部位于同一水平面上。
9、优选地,所述机壳前侧面设置有防撞板。
10、优选地,所述固定框内壁边缘位置上固定设置有滑轨,所述滑块侧面设置有滑槽,所述滑槽与滑轨相匹配。
11、优选地,所述固定框上下两侧内壁以及筒体与支撑板活动槽相对一侧面上均固定设置有阻尼层。
12、优选地,所述固定框内侧底面以及支撑板活动槽槽底均固定设置有防护垫。
13、优选地,所述导向杆底部固定连接有限位块。
14、本实用新型具有以下有益效果:
15、1、本实用新型通过设置的调节部件,通过驱动机构中的电机输出轴带动转轴转动,从而带动驱动轮转动,从而使清洁机器人移动,当清洁机器人在移动过程中遇到障碍物时,其机壳底部与障碍物接触,导致清洁机器人前端被障碍物托起,致使驱动轮离开地面,此时在第一缓冲弹簧与第二缓冲弹簧的弹性力作用下,使得滑块与滑套向下滑动,直线轴承与导向杆配合提高了滑套滑动时的稳定性,从而使得电机、转轴以及驱动轮同步向下移动,从而使驱动轮外表面与地面接触,在电机输出轴转动时使得驱动轮转动,使清洁机器人越过障碍物,提高了清洁机器人的清洁范围,增强了清洁机器人的实用性;
16、2、本实用新型通过设置的定位部件,当清洁机器人使用完成后,放置在角落时,通过液压杆输出端带动定位套向下移动,从而使定位套与轴套接触,使得轴套外表面上设置的凸起卡接在定位套凹槽内部,从而对转轴进行限位,避免驱动轮转动,从而增强了驱动轮与地面之间的摩擦力,当受到外力作用时,清洁机器人不易出现滑动,从而避免清洁机器人与墙壁发生碰撞,保护清洁机器人内部元件不受损伤。
技术特征:
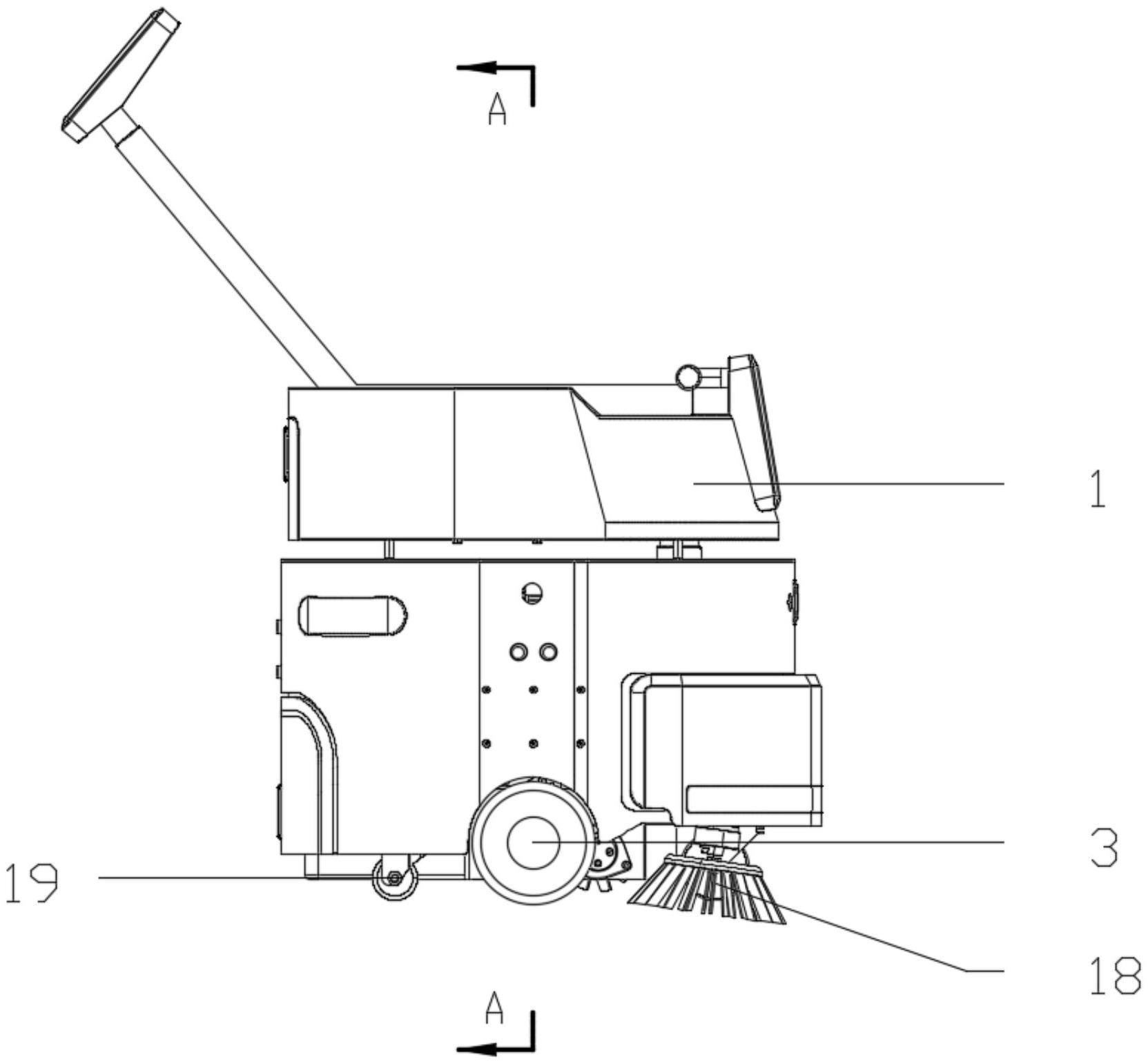
1.一种驱动轮可伸缩的清洁机器人,包括机壳(1)、设置于机壳(1)底部的机架(2)以及设置于机架(2)相对两侧中部位置上的驱动轮(3),其特征在于:所述机架(2)底部相对两侧边缘位置上均固定连接有固定框(4),所述固定框(4)与驱动轮(3)之间设置有驱动机构;
2.根据权利要求1所述的一种驱动轮可伸缩的清洁机器人,其特征在于,所述机架(2)底部前侧中部位置上活动设置有转向轮(18),所述机架(2)底部后侧相对两侧均活动设置有导向轮(19),所述转向轮(18)底部与导向轮(19)底部位于同一水平面上。
3.根据权利要求2所述的一种驱动轮可伸缩的清洁机器人,其特征在于,所述机壳(1)前侧面设置有防撞板。
4.根据权利要求3所述的一种驱动轮可伸缩的清洁机器人,其特征在于,所述固定框(4)内壁边缘位置上固定设置有滑轨,所述滑块(7)侧面设置有滑槽,所述滑槽与滑轨相匹配。
5.根据权利要求4所述的一种驱动轮可伸缩的清洁机器人,其特征在于,所述固定框(4)上下两侧内壁以及筒体(11)与支撑板(9)活动槽相对一侧面上均固定设置有阻尼层(20)。
6.根据权利要求5所述的一种驱动轮可伸缩的清洁机器人,其特征在于,所述固定框(4)内侧底面以及支撑板(9)活动槽槽底均固定设置有防护垫。
7.根据权利要求1所述的一种驱动轮可伸缩的清洁机器人,其特征在于,所述导向杆(13)底部固定连接有限位块(21)。
技术总结
本技术公开了一种驱动轮可伸缩的清洁机器人,涉及清洁机器人技术领域。本技术包括机壳、设置于机壳底部的机架以及设置于机架相对两侧中部位置上的驱动轮,机架底部相对两侧边缘位置上均固定连接有固定框,固定框与驱动轮之间设置有驱动机构,驱动机构包括电机、转轴、调节部件以及定位部件,调节部件包括设置于固定框内部的第一缓冲装置以及设置于转轴外表面上的第二缓冲装置,定位部件包括液压杆、定位套以及轴套。本技术通过设置的调节部件与定位部件,使清洁机器人越过障碍物,提高了清洁机器人的清洁范围,增强了清洁机器人的实用性,避免清洁机器人与墙壁发生碰撞,保护清洁机器人内部元件不受损伤。
技术研发人员:赵子建,周奎,王天宇,韩虎,唐陈飞,朱芳健,杨帆,陈静
受保护的技术使用者:合肥哈工澳汀智能科技有限公司
技术研发日:20221108
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!