一种行走装置及清洁机器人的制作方法
本技术属于清洁设备,具体是一种行走装置及清洁机器人。
背景技术:
1、现有市面上的清洁机器人(例如扫地机器人、洗地机器人等)的下方都设置有万向轮构件,用于牵引机器人移动。
2、在清洁机器人进行工作时,在清扫路径上遇到地面不平整或地面存在障碍物的情况下,清洁机器人则不能越过不平整的地面或障碍物继续进行清洁工作,导致清洁机器人对地面的清洁效果不完全,影响产品的市场竞争力。
3、如中国专利授权公告号为:cn216454848u,其公开了“一种可伸缩的扫地机器人万向轮,属于扫地机器人的万向轮领域,解决了现有扫地机器人中的万向轮使用过程中,碰到地面凸起或障碍物时,直接发生转向而不能越过障碍物对后方地面清扫的问题,以及现有扫地机器人装配紧密,用户无法自行检修万向轮的问题;本方案通过将竖直轴插入套筒内,将滚架螺纹安装在竖直轴上即完成万向轮构件的装配,简单快速,用户可以自行检修万向轮;通过弹簧与导向构件的配合,使万向轮构件可以发生伸缩动作,可直接越过障碍物对后方的地面进行清扫;当扫地机器人需要爬坡或者越障时,位于前方的万向轮可以贴紧地面,避免了悬空,更有利于越障行走。”该专利是与申请的技术方案最为相似的对比文件,该技术方案虽然能实现可伸缩的功能,但是其采用螺纹连接的方式在万向轮伸缩、转向时不能平稳的进行,该对比文件的技术方案缺少平稳性。
4、有鉴于此,发明人经潜心研究并配合学理运用,终于提出了一种设计合理且能有效地改善或解决上述缺陷的创作。
技术实现思路
1、本实用新型的目的在于提供一种行走装置及清洁机器人,以解决上述背景技术中提出的问题,让清洁机器人在清扫路径上可越过不平整的地面或障碍物。
2、为实现上述目的,本实用新型提供如下技术方案:
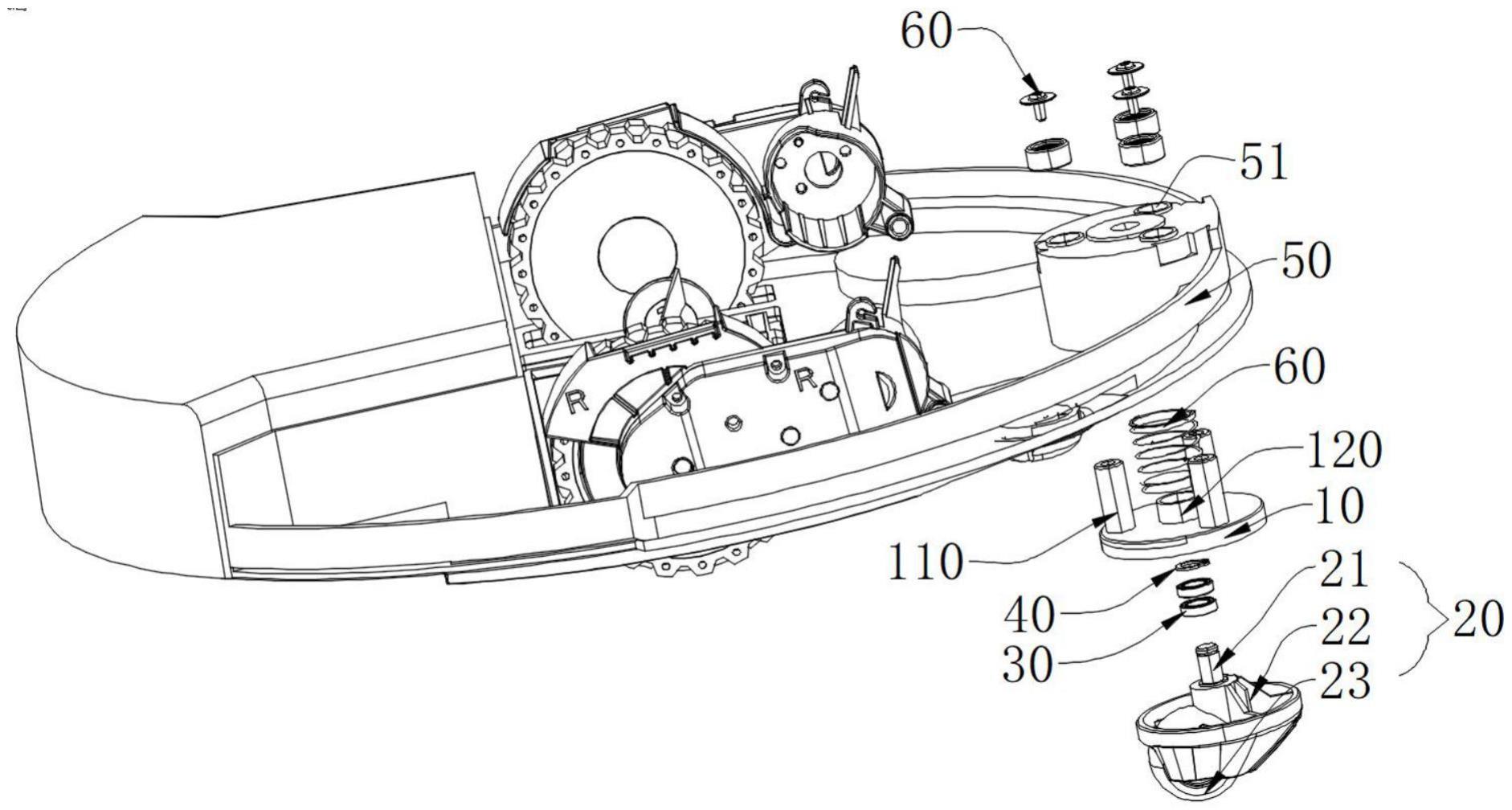
3、一种行走装置,包括:该装置由伸缩构件,以及可转动安装在伸缩构件上的可变向行走构件构成,所述伸缩构件包括浮动支架和复位件,所述浮动支架上端具有复数组竖直布置的安装管, 以及竖直布置在复数组所述安装管之间的凸柱,所述凸柱上贯设有一供所述行走构件装配的安装孔,以让该装置可沿竖直方向越过凸起地面,且所述复位件套设于所述凸柱外周,并可让该装置恢复至初始状态。
4、进一步的技术方案,在所述安装孔的内壁沿径向延展有一与之同心布置的凸环,所述可变向行走构件包括相对端均延伸出所述安装孔、凸环的转动连接件、可拆卸连接在所述转动连接件下部的转动支架和可拆卸连接在所述转动支架下部的行走轮组件,所述行走轮组件适于环绕所述转动连接件在地面可变向行走。
5、进一步的技术方案,所述转动连接件的上、下部均设有环形槽,各所述环形槽均位于所述安装孔与所述凸环外侧,且所述转动连接件的下端设有卡槽,所述转动支架上部开设有能容纳部分所述转动连接件的装配槽,所述装配槽的内壁沿径向延展有与所述环形槽形状、尺寸适配的卡环,且所述卡环下方设有与所述转动支架一体制成的卡块,所述卡块与所述卡槽形状尺寸适配,并位于所述行走轮组件上方,以让所述转动连接件与所述转动支架装配。
6、进一步的技术方案,所述转动支架沿高度方向还贯设有能容纳部分所述行走轮组件的容纳槽,在所述容纳槽侧壁上相对开设有与之连通的卡位槽,以供所述行走轮组件与所述转动支架可拆卸连接。
7、进一步的技术方案,所述行走轮组件包括轮轴和轮子,所述轮轴卡接在相对布置的所述卡位槽中,所述轮子可转动地设置在所述轮轴上,并位于所述容纳槽中,部分所述轮子的轮胎面在竖直方向上高于所述转动支架的下端,得以让所述轮子在地面行走。
8、进一步的技术方案,该行走装置还包括在所述凸环上端与下端各置放与之同心布置的轴承,各所述轴承均位于两组所述环形槽之间,且所述转动连接件外径与各所述轴承内圈适配,各所述轴承的外圈均与所述安装孔适配,各所述轴承的端面均与所述安装孔的端面齐平。
9、进一步的技术方案,该装置还包括限位件,所述限位件套设于所述转动连接件上部的环形槽中。
10、一种清洁机器人,包括底盘,以及上述行走装置,所述行走装置安装在所述底盘上。
11、进一步的技术方案,还包括紧固件,所述底盘上开设有数量与所述紧固件适配的通孔,所述紧固件穿设过所述通孔将所述行走装置安装在所述底盘下端。
12、进一步的技术方案,还包括安装在通孔中的转动构件。
13、本实用新型的有益效果:
14、本实用新型提供的行走装置及清洁机器人,通过设置可变向构件和伸缩构件构成行走装置,将其安装在清洁清洁机器人上使用,让其工作时可越过不平整地面或障碍物继续再清洁路径上工作;以区别于传统的清洁机器人遇到不平整地面或障碍物则无法前进工作,只能转换方向进行清洁,因此,本实用新型具有较好的清洁效果。
15、本实用新型的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种行走装置,其特征在于,包括:该装置由伸缩构件,以及可转动安装在伸缩构件上的可变向行走构件构成,所述伸缩构件包括浮动支架和复位件,所述浮动支架上端具有复数组竖直布置的安装管, 以及竖直布置在复数组所述安装管之间的凸柱,所述凸柱上贯设有一供所述行走构件装配的安装孔,以让该装置可沿竖直方向越过凸起地面,且所述复位件套设于所述凸柱外周,并可让该装置恢复至初始状态。
2.根据权利要求1所述的行走装置,其特征在于:在所述安装孔的内壁沿径向延展有一与之同心布置的凸环,所述可变向行走构件包括相对端均延伸出所述安装孔、凸环的转动连接件、可拆卸连接在所述转动连接件下部的转动支架和可拆卸连接在所述转动支架下部的行走轮组件,所述行走轮组件适于环绕所述转动连接件在地面可变向行走。
3.根据权利要求2所述的行走装置,其特征在于:所述转动连接件的上、下部均设有环形槽,各所述环形槽均位于所述安装孔与所述凸环外侧,且所述转动连接件的下端设有卡槽,所述转动支架上部开设有能容纳部分所述转动连接件的装配槽,所述装配槽的内壁沿径向延展有与所述环形槽形状、尺寸适配的卡环,且所述卡环下方设有与所述转动支架一体制成的卡块,所述卡块与所述卡槽形状尺寸适配,并位于所述行走轮组件上方,以让所述转动连接件与所述转动支架装配。
4.根据权利要求3所述的行走装置,其特征在于:所述转动支架沿高度方向还贯设有能容纳部分所述行走轮组件的容纳槽,在所述容纳槽侧壁上相对开设有与之连通的卡位槽,以供所述行走轮组件与所述转动支架可拆卸连接。
5.根据权利要求4所述的行走装置,其特征在于:所述行走轮组件包括轮轴和轮子,所述轮轴卡接在相对布置的所述卡位槽中,所述轮子可转动地设置在所述轮轴上,并位于所述容纳槽中,部分所述轮子的轮胎面在竖直方向上高于所述转动支架的下端,得以让所述轮子在地面行走。
6.根据权利要求3所述的行走装置,其特征在于:该行走装置还包括在所述凸环上端与下端各置放与之同心布置的轴承,各所述轴承均位于两组所述环形槽之间,且所述转动连接件外径与各所述轴承内圈适配,各所述轴承的外圈均与所述安装孔适配,各所述轴承的端面均与所述安装孔的端面齐平。
7.根据权利要求6所述的行走装置,其特征在于:该装置还包括限位件,所述限位件套设于所述转动连接件上部的环形槽中。
8.一种清洁机器人,其特征在于,包括底盘,以及权利要求1-7任一项所述的行走装置,所述行走装置安装在所述底盘上。
9.根据权利要求8所述的清洁机器人,其特征在于:还包括紧固件,所述底盘上开设有数量与所述紧固件适配的通孔,所述紧固件穿设过所述通孔将所述行走装置安装在所述底盘下端。
10.根据权利要求9所述的清洁机器人,其特征在于:还包括安装在通孔中的转动构件。
技术总结
本技术公开了一种行走装置及清洁机器人,是由伸缩构件,以及可转动安装在伸缩构件上的可变向行走构件构成;所述伸缩构件包括浮动支架和复位件,所述浮动支架上端具有复数组竖直布置的安装管,以及竖直布置在复数组所述安装管之间的凸柱,所述凸柱上贯设有一供所述行走构件装配的安装孔,且所述复位件套设于所述凸柱外周。本技术还公开了采用该行走装置的清洁机器人,其具有在工作时可越过不平整地面或障碍物的特点。
技术研发人员:焦加加,刘智辉
受保护的技术使用者:广东旺家智能机器人有限公司
技术研发日:20221122
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!