一种移动清洁机器人的制作方法
本技术涉及清洁机器,尤其涉及一种移动清洁机器人。
背景技术:
1、清洁机器人的应用越来越广泛,在实际运用中,移动清洁机器人的移动机构上会附着有水渍或污渍,将会影响移动机构的抓地力,可能出现打滑,并且在行走过程中留下印记,从而造成清洁的负担,影响清洁效果。
2、在现有技术中,一般会在移动机构的附近固定安装刮擦件,通过刮擦件清理行走机构上的水渍或者污渍。但由于刮擦件是固定安装的,不能进行相应的位置变换,因此在使用完成后刮擦件上附着的污渍或者水渍依然持续与所述行走机构接触,从而造成对行走机构的重复污染,影响清洁效果。
技术实现思路
1、本实用新型提供一种移动清洁机器人,用以解决现有技术中刮擦件固定安装导致刮擦件对行走机构的污染的缺陷,实现刮擦件与行走机构之间的离合。
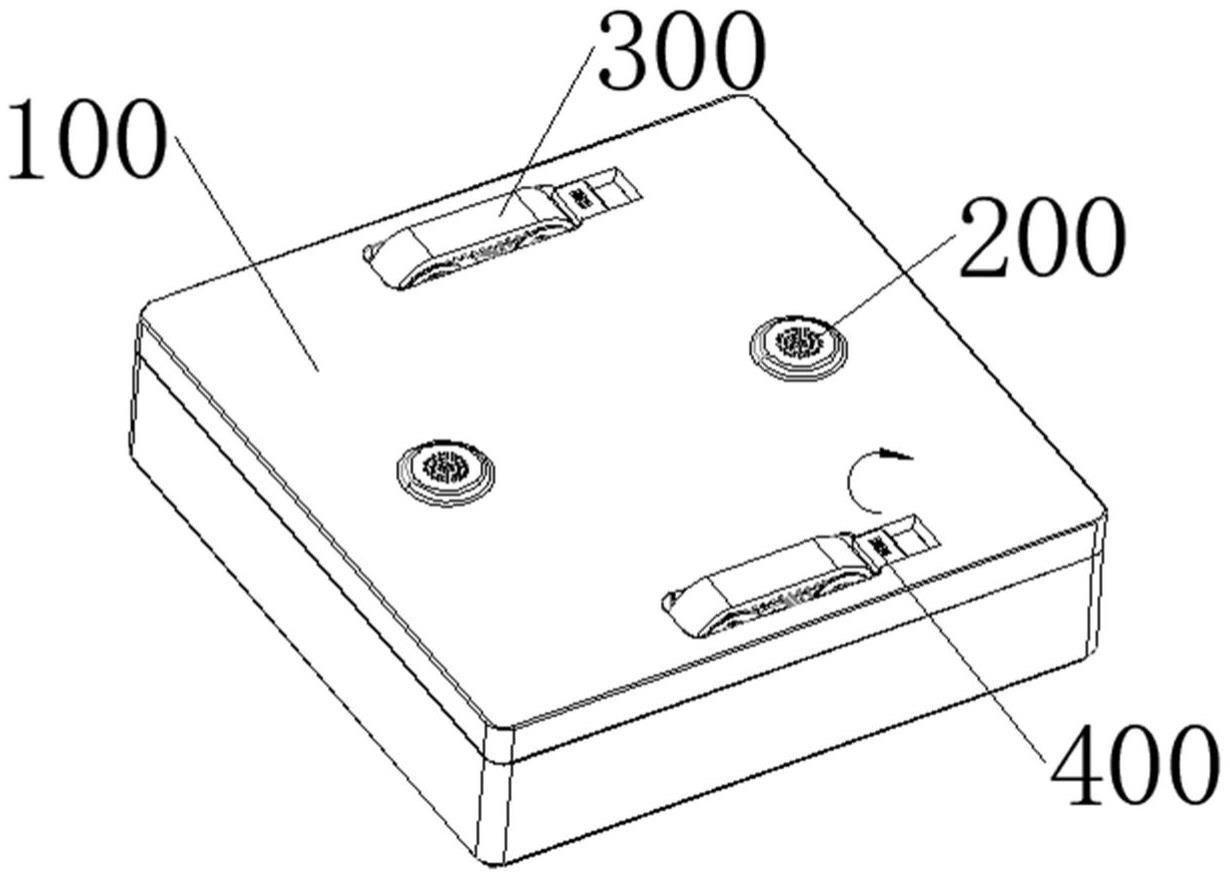
2、本实用新型提供一种移动清洁机器人,包括:
3、机器人本体;
4、吸附机构,设在所述机器人本体的底部,用于将所述机器人本体吸附在工作面上;
5、行走机构,设在所述机器人本体,用于驱动所述机器人本体在所述工作面上移动;以及
6、清洁件,活动地设在所述机器人本体的底部,所述机器人本体设有至少两个用于固定安置所述清洁件的位置;且所述清洁件位于一个位置时,所述清洁件能够与所述行走机构的行走表面接触;而当所述清洁件位于另一个位置时,所述清洁件与所述行走机构的行走表面脱离。
7、根据本实用新型提供的一种移动清洁机器人,所述清洁件相对于所述机器人本体进行平移、旋转或翻转;
8、所述平移包括平行于所述机器人本体底面平移或与所述机器人本体的底面成角度平移;
9、所述旋转包括沿所述机器人本体的底面水平或者成角度旋转;
10、所述翻转包括以平行于所述机器人本体的底面的轴线为旋转轴翻转。
11、根据本实用新型提供的一种移动清洁机器人,所述清洁件通过人力或者驱动装置进行平移、旋转或翻转。
12、根据本实用新型提供的一种移动清洁机器人,所述驱动装置包括电动推杆和电机,所述清洁件通过电动推杆进行平移。
13、根据本实用新型提供的一种移动清洁机器人,所述清洁件通过电机进行旋转或者翻转。
14、根据本实用新型提供的一种移动清洁机器人,所述清洁件包括固定座和清洁片;
15、所述固定座和所述清洁片装配一体或者可拆卸连接;
16、所述固定座与所述机器人本体连接;
17、所述清洁片与所述行走机构的行走表面接触。
18、根据本实用新型提供的一种移动清洁机器人,所述清洁片通过卡接、螺纹连接或者粘接的方式与所述固定座可拆卸地连接。
19、根据本实用新型提供的一种移动清洁机器人,所述清洁片包括但不限于刷子、刮条或者布料的一种或多种组合。
20、根据本实用新型提供的一种移动清洁机器人,所述行走机构设在所述机器人本体的底部,对应每个所述行走机构设有两个清洁件,两个所述清洁件分别设在所述行走机构行走方向的两端。
21、根据本实用新型提供的一种移动清洁机器人,所述机器人本体还设有导向槽,所述清洁件设在所述导向槽中。
22、本实用新型实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
23、本实用新型通过在机器人本体的底部设有至少两个固定安置清洁件的位置,能够使得清洁件在两个不同的固定位置间活动,当需要清洁行走机构时,则使其移动至其中一个固定位置,并使清洁件与行走机构的行走表面相接触,从而对行走表面进行清理;而在清理完成后,使清洁件移动至另一固定位置,使清洁件与行走机构的行走表面脱离,从而避免移动清洁机器人在清洁作业时,清洁件上残留的污物会重复污染行走机构进而对清洁表面造成重复污染。此外,当需要对清洁件上的污渍或者水渍进行处理时,可将清洁件移动到与行走机构分离的位置,从而便于对清洁件进行清理;
技术特征:
1.一种移动清洁机器人,其特征在于,包括:
2.根据权利要求1所述的移动清洁机器人,其特征在于,
3.根据权利要求2所述的移动清洁机器人,其特征在于,
4.根据权利要求3所述的移动清洁机器人,其特征在于,
5.根据权利要求4所述的移动清洁机器人,其特征在于,
6.根据权利要求1-5任一项所述的移动清洁机器人,其特征在于,
7.根据权利要求6所述的移动清洁机器人,其特征在于,
8.根据权利要求6所述的移动清洁机器人,其特征在于,
9.根据权利要求6所述的移动清洁机器人,其特征在于,
10.根据权利要求9所述的移动清洁机器人,其特征在于,
技术总结
本技术涉及清洁机器技术领域,提供一种移动清洁机器人。移动清洁机器人包括机器人本体;吸附机构,设在所述机器人本体的底部,用于将所述机器人本体吸附在工作面上;行走机构,设在所述机器人本体,用于驱动所述机器人本体在所述工作面上移动;以及清洁件,活动地设在所述机器人本体的底部,所述机器人本体设有至少两个用于固定安置所述清洁件的位置;且所述清洁件位于一个位置时,所述清洁件能够与所述行走机构的行走表面接触;而当所述清洁件位于另一个位置时,所述清洁件与所述行走机构的行走表面脱离。本技术实现刮擦件与行走机构之间的离合,解决现有技术中刮擦件固定安装导致刮擦件对行走机构的污染的缺陷。
技术研发人员:曾德杰
受保护的技术使用者:凌度(广东)智能科技发展有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!