一种清洁机器人及其升降装置和摩擦结构的制作方法
本技术涉及机械传动,更具体地说,涉及一种摩擦结构。此外,还涉及一种包括上述摩擦结构的升降装置及清洁机器人。
背景技术:
1、现有技术中,通常采用弹性壳体内壁延伸出凸起与套筒直接过盈配合产生预紧力,在套筒转动时,套筒与延伸凸起之间产生滑动摩擦力来实现套筒升降,但是这种设计方案中滑动摩擦造成的磨损、发热问题会影响结构寿命,并且,会对套筒和弹性壳体间的摩擦力大小精度要求高,需要落在预定区间内,由于加工误差、装配等原因,摩擦力往往容易超出预定区间,当摩擦力过大时,套筒在伸出后转动时会出现卡转现象,当摩擦力过小时,套筒受到的摩擦力小于螺纹副间的摩擦力矩,套筒被连接件直接带动旋转,无法完成升降操作。
2、综上所述,如何提高弹性壳体和套筒的装配使用效果,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本实用新型的目的是提供一种摩擦结构,可有效提高弹性壳体和套筒的装配使用效果。
2、本实用新型的另一目的是提供一种包括上述摩擦结构的升降装置及清洁机器人。
3、为了实现上述目的,本实用新型提供如下技术方案:
4、一种摩擦结构,包括:弹性套壳和套筒,所述套筒的外周部和所述弹性套壳的滚动轴套过盈配合,且所述套筒的外周部与所述弹性套壳的内壁互不接触;所述弹性套壳设有缺口,所述缺口处设有呈波浪状分布的弹性凸起结构,两个上下分布的所述弹性凸起结构之间设有所述滚动轴套。
5、优选的,所述弹性套壳沿周向等间隔设有至少两个所述缺口。
6、优选的,所述弹性凸起结构和所述缺口为一体式注塑结构,所述弹性凸起结构和所述滚动轴套通过转动销贯穿连接。
7、一种升降装置,包括上述任一项所述的摩擦结构。
8、优选的,还包括设于所述套筒内的内圈和可周向旋转的连接件,所述连接件的内周部套设于所述内圈的外周部,所述连接件的外周部和所述套筒的内周部螺纹连接。
9、优选的,所述套筒的内壁设有螺纹部,所述连接件的外壁设有与所述螺纹部啮合的啮合部。
10、优选的,所述螺纹部呈螺旋状,且所述螺纹部的一端为开口端、另一端为闭合端,所述开口端设有用于对所述连接件进行限位的止挡圈。
11、优选的,所述止挡圈为弹性材质件。
12、一种清洁机器人,包括:驱动件、传动件、壳体以及上述任一项所述的升降装置,所述驱动件和所述升降装置的连接件通过所述传动件连接,所述传动件设于所述壳体内。
13、优选的,还包括用于与拖把连接的输出固定件,所述输出固定件嵌设于所述套筒的内圈内。
14、开口端在使用本实用新型所提供的摩擦结构时,当驱动套筒转动的扭力大于套筒外壁与滚动轴套之间的摩擦力时,套筒可被带动开始转动升降。并且,由于弹性套壳和套筒未直接接触,仅通过滚动轴套与套筒过盈配合实现装配,滚动轴套可减小弹性套壳与套筒的接触面积,使套筒转动时与接触点的摩擦从滑动摩擦变为滚动摩擦,进而有效提高弹性套壳和套筒的使用效果和使用寿命。
15、而且,本装置使用滚动轴套结合弹性凸起结构的形式,以提供旋转升降运动所需的预紧力及摩擦力。弹性凸起结构使得滚动轴套具有更大的形变范围,使得对套筒与转动驱动件之间的摩擦力具有更大的容错率,在摩擦力过大或过小时,由于弹性凸起结构的特性,可使得弹性套壳撑开或收紧,使摩擦力始终落在预定区间内,从而降低装置加工及装配难度。
16、综上所述,本实用新型所提供的摩擦结构,可有效提高弹性壳体和套筒的装配使用效果。
17、此外,本实用新型还提供了一种包括上述摩擦结构的升降装置及清洁机器人。
技术特征:
1.一种摩擦结构,其特征在于,包括:弹性套壳(1)和套筒(2),所述套筒(2)的外周部和所述弹性套壳(1)的滚动轴套(11)过盈配合,且所述套筒(2)的外周部与所述弹性套壳(1)的内壁互不接触;所述弹性套壳(1)设有缺口(12),所述缺口(12)处设有呈波浪状分布的弹性凸起结构(13),两个上下分布的所述弹性凸起结构(13)之间设有所述滚动轴套(11)。
2.根据权利要求1所述的摩擦结构,其特征在于,所述弹性套壳(1)沿周向等间隔设有至少两个所述缺口(12)。
3.根据权利要求2所述的摩擦结构,其特征在于,所述弹性凸起结构(13)和所述缺口(12)为一体式注塑结构,所述弹性凸起结构(13)和所述滚动轴套(11)通过转动销贯穿连接。
4.一种升降装置,其特征在于,包括上述权利要求1-3任一项所述的摩擦结构。
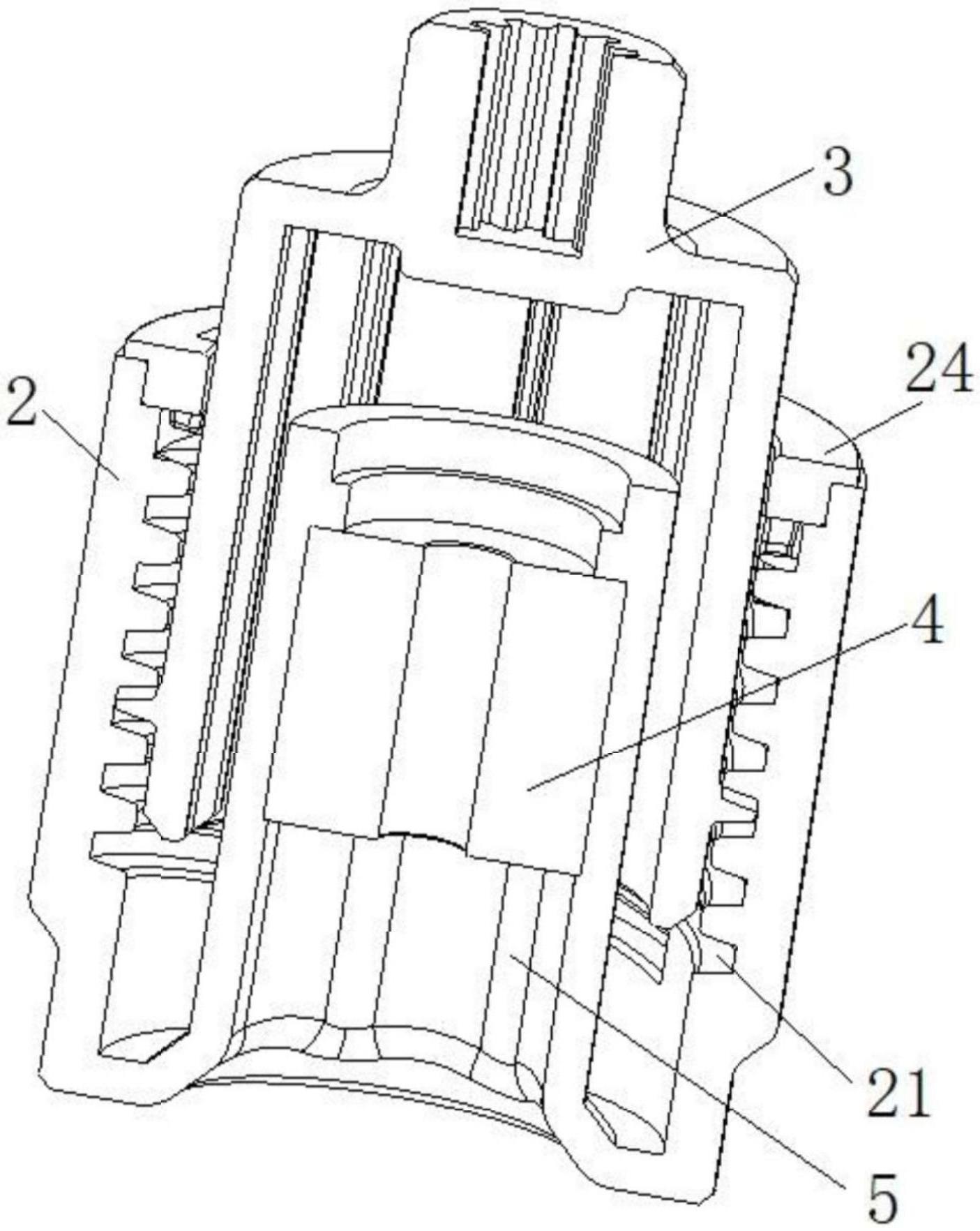
5.根据权利要求4所述的升降装置,其特征在于,还包括设于所述套筒(2)内的内圈(5)和可周向旋转的连接件(3),所述连接件(3)的内周部套设于所述内圈(5)的外周部,所述连接件(3)的外周部和所述套筒(2)的内周部螺纹连接。
6.根据权利要求5所述的升降装置,其特征在于,所述套筒(2)的内壁设有螺纹部(21),所述连接件(3)的外壁设有与所述螺纹部(21)啮合的啮合部(31)。
7.根据权利要求6所述的升降装置,其特征在于,所述螺纹部(21)呈螺旋状,且所述螺纹部(21)的一端为开口端(22)、另一端为闭合端(23),所述开口端(22)设有用于对所述连接件(3)进行限位的止挡圈(24)。
8.根据权利要求7所述的升降装置,其特征在于,所述止挡圈(24)为弹性材质件。
9.一种清洁机器人,其特征在于,包括:驱动件(6)、传动件(7)、壳体(8)以及上述权利要求4-8任一项所述的升降装置,所述驱动件(6)和所述升降装置的连接件(3)通过所述传动件(7)连接,所述传动件(7)设于所述壳体(8)内。
10.根据权利要求9所述的清洁机器人,其特征在于,还包括用于与拖把连接的输出固定件(4),所述输出固定件(4)嵌设于所述套筒(2)的内圈(5)内。
技术总结
本技术公开了一种清洁机器人及其升降装置和摩擦结构,涉及机械传动技术领域,摩擦结构包括:弹性套壳和套筒,套筒的外周部和弹性套壳的滚动轴套过盈配合,且套筒的外周部与弹性套壳的内壁互不接触;弹性套壳设有缺口,缺口处设有呈波浪状分布的弹性凸起结构,两个上下分布的弹性凸起结构之间设有滚动轴套。本装置使用滚动轴套结合弹性凸起结构的形式,以提供旋转升降运动所需的预紧力及摩擦力。弹性凸起结构使得滚动轴套具有更大的形变范围,对套筒与转动驱动件之间的摩擦力具有更大的容错率,在摩擦力过大或过小时,由于弹性凸起结构的特性,可使弹性套壳撑开或收紧,使摩擦力始终落在预定区间内,从而降低装置加工及装配难度。
技术研发人员:向庆波
受保护的技术使用者:深圳市兆威机电股份有限公司
技术研发日:20221226
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!