快拆尘盒、清洁装置及清洁机器人的制作方法
本申请涉及清洁设备,尤其是涉及一种快拆尘盒、清洁装置及清洁机器人。
背景技术:
1、清洁机器人用于对地面进行清洁,其包括用于发挥清洁功能的清洁装置,通过清洁装置可以将地面上的杂物、灰尘等进行清扫,而为了便于对清扫后的杂物、灰尘等进行收集,以集中倾倒,清洁装置通常还包括尘盒。而为了便于将尘盒快速地进行拆卸,提升用于体验,节约清洁用时,尘盒通常还设置为快拆的形式。然而在现有技术中,快拆的形式通常为卡接,在拆卸的过程中,快拆尘盒容易因拆卸时施加的外力而发生抖动,并且致使内部的杂物、灰尘等洒落。
技术实现思路
1、为了使得快拆尘盒在拆卸时不易因抖动而将内部的杂物、灰尘等洒落,本申请提供一种快拆尘盒、清洁装置及清洁机器人。
2、第一方面,本申请提供一种快拆尘盒,所述快拆尘盒用于清洁装置,所述清洁装置还包括清洁罩,所述清洁罩上设置有滑轨和插销孔,所述滑轨设置有两条,两条所述滑轨相对设置,并且沿延伸方向的同一端设置滑轨入口,所述插销孔设置在两条所述滑轨之间,并且靠近所述滑轨入口,所述快拆尘盒包括:
3、尘盒本体,其一侧用于与所述清洁罩连接,并且设置有两个滑动部;
4、插销件,其可伸缩地设置在所述尘盒本体用于与所述清洁罩连接的一侧上;
5、其中,当所述尘盒本体与所述清洁罩连接时,两个所述滑动部从所述滑轨入口分别进入两条所述滑轨内,两个所述滑动部分别在两条所述滑轨内滑动直至所述插销件伸入所述插销孔内;
6、当所述尘盒本体与所述清洁罩拆离时,所述插销件从所述插销孔内退出,两个所述滑动部分别在两条所述滑轨内滑动直至两个所述滑动部从所述滑轨入口退出两条所述滑轨。
7、可选的,所述滑动部包括条部和凸起部,所述条部沿所述滑轨的延伸方向连续设置,所述凸起部与所述条部连接,并且设置有若干个,若干个所述凸起部沿所述滑轨的延伸方向间隔设置,并且用于与所述滑轨远离所述清洁罩的一侧相抵接。
8、可选的,所述尘盒本体还设置有收集腔室,并且在用于与所述清洁罩连接的一侧上设置有收集口,所述收集口与所述收集腔室相连通,所述清洁罩设置有与所述收集口相连通的过尘口。
9、可选的,所述快拆尘盒还包括集尘挡板,所述尘盒本体在所述收集口的下半部设置有挡板沉槽,所述集尘挡板嵌装在所述挡板沉槽内,并且用于与所述清洁罩相抵接,所述过尘口与所述收集口的上半部相连通。
10、可选的,所述尘盒本体在所述收集口的外沿设置有翻边部,两个所述滑动部的所述条部由所述翻边部所构成。
11、可选的,所述尘盒本体用于与所述清洁罩连接的一侧上设置有插销槽,所述插销件包括销部、滑块部、弹簧部和限位部,所述滑块部可滑动地设置在所述插销槽内,所述限位部的一端穿过所述插销槽的槽底与所述销部连接、另一端与所述尘盒本体相抵接,所述弹簧部的两端分别抵接在所述滑块部和所述插销槽的槽底上,所述销部设置在所述滑块部远离所述弹簧部的一端。
12、可选的,所述销部设置有第一接触面和第二接触面,所述第一接触面沿所述滑动部进入所述滑轨的方向倾斜设置,所述第二接触面沿所述滑动部退出所述滑轨的方向倾斜设置。
13、可选的,所述滑块部中空设置,并且内部设置有导向杆,所述弹簧部设置在所述导向杆外,所述限位部与所述导向杆连接。
14、第二方面,本申请提供一种清洁装置,所述清洁装置包括清洁罩以及本申请提供的任意一种快拆尘盒,所述快拆尘盒可拆卸设置在所述清洁罩上。
15、第三方面,本申请提供一种清洁机器人,所述清洁机器人包括本申请提供的任意一种清洁装置。
16、本申请通过相互配合的两条滑轨和两个滑动部将尘盒本体与清洁罩滑动连接,并且通过在两条滑轨的滑轨入口之间设置相互配合插销件和插销孔,在将尘盒本体与清洁罩拆离时,可以仅在将插销件从插销孔内退出时施加较大的推力,而之后仅需要施加较小的推力即可继续推动尘盒本体与清洁罩进行拆离,因此尘盒本体在拆卸的过程中不易发生抖动,进而可以使得内部的杂物、灰尘等不易因抖动而洒落。
技术特征:
1.一种快拆尘盒(100),所述快拆尘盒(100)用于清洁装置,所述清洁装置还包括清洁罩(200),所述清洁罩(200)上设置有滑轨(210)和插销孔(220),所述滑轨(210)设置有两条,两条所述滑轨(210)相对设置,并且沿延伸方向的同一端设置滑轨入口(211),所述插销孔(220)设置在两条所述滑轨(210)之间,并且靠近所述滑轨入口(211),其特征在于,所述快拆尘盒(100)包括:
2.根据权利要求1所述的快拆尘盒(100),其特征在于,所述滑动部(111)包括条部(111a)和凸起部(111b),所述条部(111a)沿所述滑轨(210)的延伸方向连续设置,所述凸起部(111b)与所述条部(111a)连接,并且设置有若干个,若干个所述凸起部(111b)沿所述滑轨(210)的延伸方向间隔设置,并且用于与所述滑轨(210)远离所述清洁罩(200)的一侧相抵接。
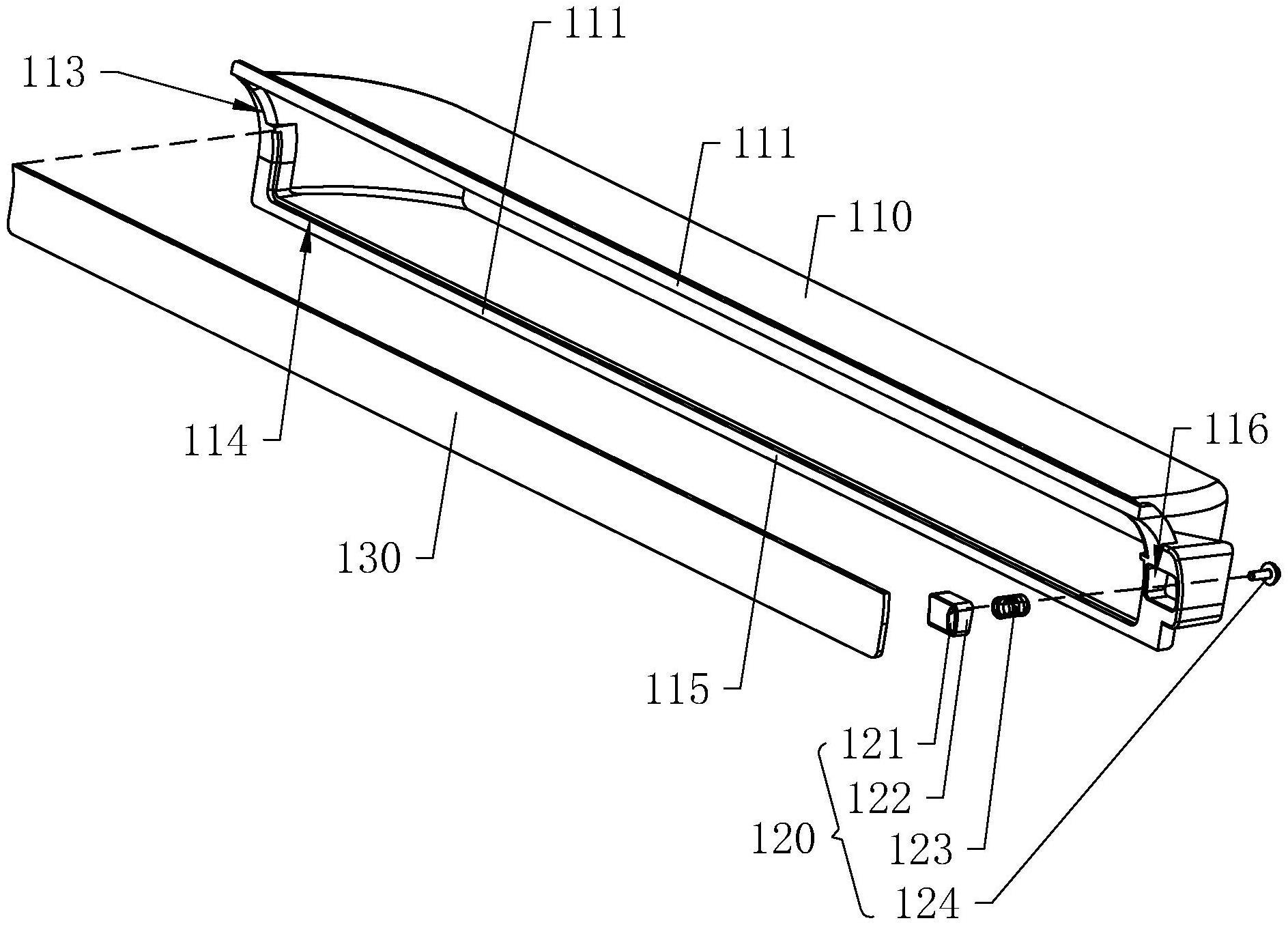
3.根据权利要求2所述的快拆尘盒(100),其特征在于,所述尘盒本体(110)还设置有收集腔室(112),并且在用于与所述清洁罩(200)连接的一侧上设置有收集口(113),所述收集口(113)与所述收集腔室(112)相连通,所述清洁罩(200)设置有与所述收集口(113)相连通的过尘口(230)。
4.根据权利要求3所述的快拆尘盒(100),其特征在于,所述快拆尘盒(100)还包括集尘挡板(130),所述尘盒本体(110)在所述收集口(113)的下半部设置有挡板沉槽(114),所述集尘挡板(130)嵌装在所述挡板沉槽(114)内,并且用于与所述清洁罩(200)相抵接,所述过尘口(230)与所述收集口(113)的上半部相连通。
5.根据权利要求3所述的快拆尘盒(100),其特征在于,所述尘盒本体(110)在所述收集口(113)的外沿设置有翻边部(115),两个所述滑动部(111)的所述条部(111a)由所述翻边部(115)所构成。
6.根据权利要求1所述的快拆尘盒(100),其特征在于,所述尘盒本体(110)用于与所述清洁罩(200)连接的一侧上设置有插销槽(116),所述插销件(120)包括销部(121)、滑块部(122)、弹簧部(123)和限位部(124),所述滑块部(122)可滑动地设置在所述插销槽(116)内,所述限位部(124)的一端穿过所述插销槽(116)的槽底与所述销部(121)连接、另一端与所述尘盒本体(110)相抵接,所述弹簧部(123)的两端分别抵接在所述滑块部(122)和所述插销槽(116)的槽底上,所述销部(121)设置在所述滑块部(122)远离所述弹簧部(123)的一端。
7.根据权利要求6所述的快拆尘盒(100),其特征在于,所述销部(121)设置有第一接触面(121a)和第二接触面(121b),所述第一接触面(121a)沿所述滑动部(111)进入所述滑轨(210)的方向倾斜设置,所述第二接触面(121b)沿所述滑动部(111)退出所述滑轨(210)的方向倾斜设置。
8.根据权利要求6所述的快拆尘盒(100),其特征在于,所述滑块部(122)中空设置,并且内部设置有导向杆(125),所述弹簧部(123)设置在所述导向杆(125)外,所述限位部(124)与所述导向杆(125)连接。
9.一种清洁装置,其特征在于,所述清洁装置包括清洁罩(200)以及如权利要求1至8任一项所述的快拆尘盒(100),所述快拆尘盒(100)可拆卸设置在所述清洁罩(200)上。
10.一种清洁机器人,其特征在于,所述清洁机器人包括如权利要求9所述的清洁装置。
技术总结
本申请公开了一种快拆尘盒、清洁装置及清洁机器人,快拆尘盒用于清洁装置,清洁装置还包括清洁罩,清洁罩上设置有滑轨和插销孔,并且沿延伸方向的同一端设置滑轨入口,快拆尘盒包括:尘盒本体,其设置有两个滑动部;插销件,其可伸缩地设置;其中,当尘盒本体与清洁罩连接时,两个滑动部从滑轨入口分别进入两条滑轨内,插销件伸入插销孔内;当尘盒本体与清洁罩拆离时,插销件从插销孔内退出,两个滑动部退出两条滑轨。本申请可以仅在将插销件从插销孔内退出时施加较大的推力,而之后仅需要施加较小的推力即可继续推动尘盒本体与清洁罩进行拆离,因此尘盒本体在拆卸的过程中不易发生抖动,进而可以使得内部的杂物、灰尘等不易因抖动而洒落。
技术研发人员:陈兴文,赵永进
受保护的技术使用者:奇勃(深圳)科技有限公司
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!