机械关节、机械臂和自移动清洁设备的制作方法
本技术涉及机械臂,尤其涉及到一种机械关节、机械臂和自移动清洁设备。
背景技术:
1、随着科学技术的不断发展和人们生活水平的不断提高,自移动清洁设备,如智能扫地机器人已经不断地走入到我们的日常生活中。目前的自移动清洁设备,为了更好的实现清扫功能,会增设机械臂以实现障碍物或垃圾的抓取或移动。
2、其中,机械臂中通常需要设置有机械关节以实现操作机构相对于工作臂的转动。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本实用新型的此部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
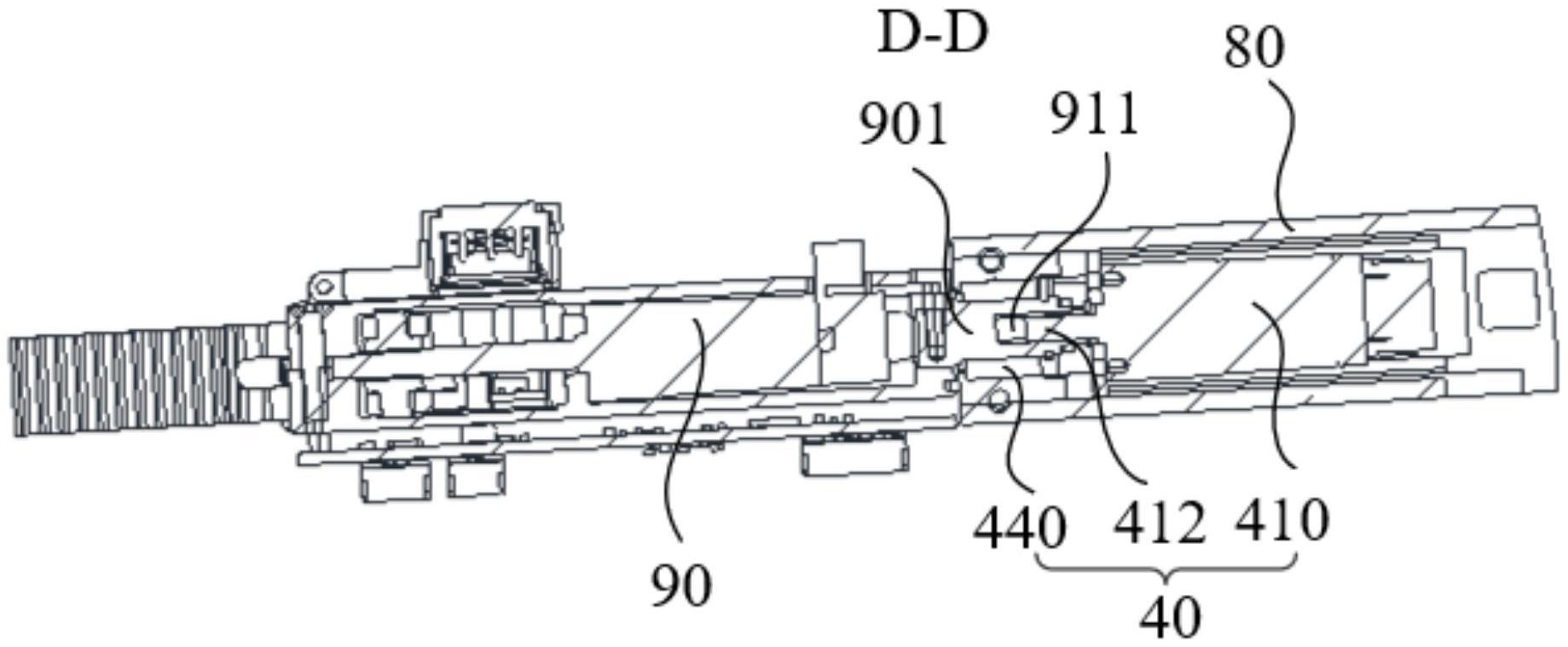
2、本实用新型第一方面的实施例,提供了一种机械关节,用于机械臂,机械臂包括工作臂和操作机构,机械关节包括:第一驱动部,第一驱动部与操作机构连接以驱动操作机构相对于工作臂旋转;光电传感器、挡板和连接结构,光电传感器和挡板中的一个设置于操作机构上,另一个通过连接结构安装在机械关节的框架上,挡板用于在操作机构处于零点位置时,改变光电传感器的感测结果。
3、进一步地,第一驱动部与光电传感器连接,第一驱动部用于根据光电传感器的感测结果转动或停止转动。
4、进一步地,第一驱动部包括第一壳体和第一输出轴,第一壳体与工作臂连接,光电传感器设置于工作臂或壳体上;操作机构包括与第一输出轴连接的连接轴,挡板设置于连接轴上;其中,当操作机构处于零点位置时,挡板用于阻止光电传感器接收光信号。
5、进一步地,机械关节还包括:轴承装置,工作臂朝向操作机构的一端设置有安装孔,以及与安装孔连通位于安装孔远离操作机构一侧的安装槽,第一驱动部位于安装槽内,连接轴穿设于安装孔,轴承装置位于安装孔内,工作臂和连接轴之间通过轴承装置相连接。
6、进一步地,轴承装置为滚珠轴承或滑动轴承。
7、进一步地,连接轴的端部设置有限位孔,第一输出轴插设于限位孔与连接轴连接,限位孔用于对连接轴相对于第一输出轴的转动进行限位;
8、进一步地,限位孔为d型孔。
9、进一步地,机械关节还包括:第一转角检测装置,设置于第一驱动部上,用于检测第一输出轴的转角,第一驱动部还根据第一转角检测装置的检测结果转动或停止转动。
10、本实用新型第二方面的实施例,提供了一种机械臂,包括:第一方面中任一项的机械关节。
11、本实用新型第三方面的实施例,提供了一种自移动清洁设备,包括:第二方面的机械臂。
12、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其它目的、特征和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
技术特征:
1.一种机械关节,用于机械臂(001),所述机械臂(001)包括工作臂(80)和操作机构,其特征在于,所述机械关节包括:
2.根据权利要求1所述的机械关节,其特征在于,
3.根据权利要求1所述的机械关节,其特征在于:
4.根据权利要求3所述的机械关节,其特征在于,所述机械关节还包括:
5.根据权利要求4所述的机械关节,其特征在于,
6.根据权利要求3所述的机械关节,其特征在于,
7.根据权利要求6所述的机械关节,其特征在于,所述限位孔为d型孔。
8.根据权利要求3至7中任一项所述的机械关节,其特征在于,还包括:
9.一种机械臂(001),其特征在于,包括:如权利要求1至8中任一项所述的机械关节。
10.一种自移动清洁设备(002),其特征在于,包括:如权利要求9所述的机械臂(001)。
技术总结
本技术公开了一种机械关节、机械臂和自移动清洁设备。其中,机械关节用于机械臂,机械臂包括工作臂和操作机构,机械关节包括:第一驱动部,第一驱动部与操作机构连接以驱动操作机构相对于工作臂旋转;光电传感器、挡板和连接结构,光电传感器和挡板中的一个设置于操作机构上,另一个通过连接结构安装在机械关节的框架上,挡板用于在操作机构处于零点位置时,改变光电传感器的感测结果。
技术研发人员:余强,李长城,邹绿武
受保护的技术使用者:北京石头世纪科技股份有限公司
技术研发日:20221230
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!