扫地机器人的停机清洗方法、控制器及存储介质与流程
本发明涉及扫地机器人领域,特别涉及一种扫地机器人的停机清洗方法、控制器及存储介质。
背景技术:
1、随着经济的发展与社会的进步,一些能够解放人手的智能电器应运而生。扫地机器人能够自动清洁地面,为家庭清洁带来了诸多便利。相关技术中,扫地机器人在完成清洗工作后接收到停机指令便即刻停下来留在原地,扫地机器人立即停留地面会有部分残留的顽固脏污和水渍,并且停留过久会出现清洁部件中未被吸扫入脏污箱的残留的脏污和水渍掉落到地面上,造成地面二次脏污和形成脏污水渍痕印,导致清洗质量不佳。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明实施例提供了一种扫地机器人的停机清洗方法、控制器及存储介质,有利于解决扫地机器人接收到停机指令时立即停在原地产生的残留的顽固脏污和水渍的问题,并有利于解决停机后停留过久会出现清洁部件中未被吸扫入脏污箱的残留的脏污和水渍掉落到地面上,造成地面二次脏污和形成脏污水渍痕印导致清洗质量不佳的问题。
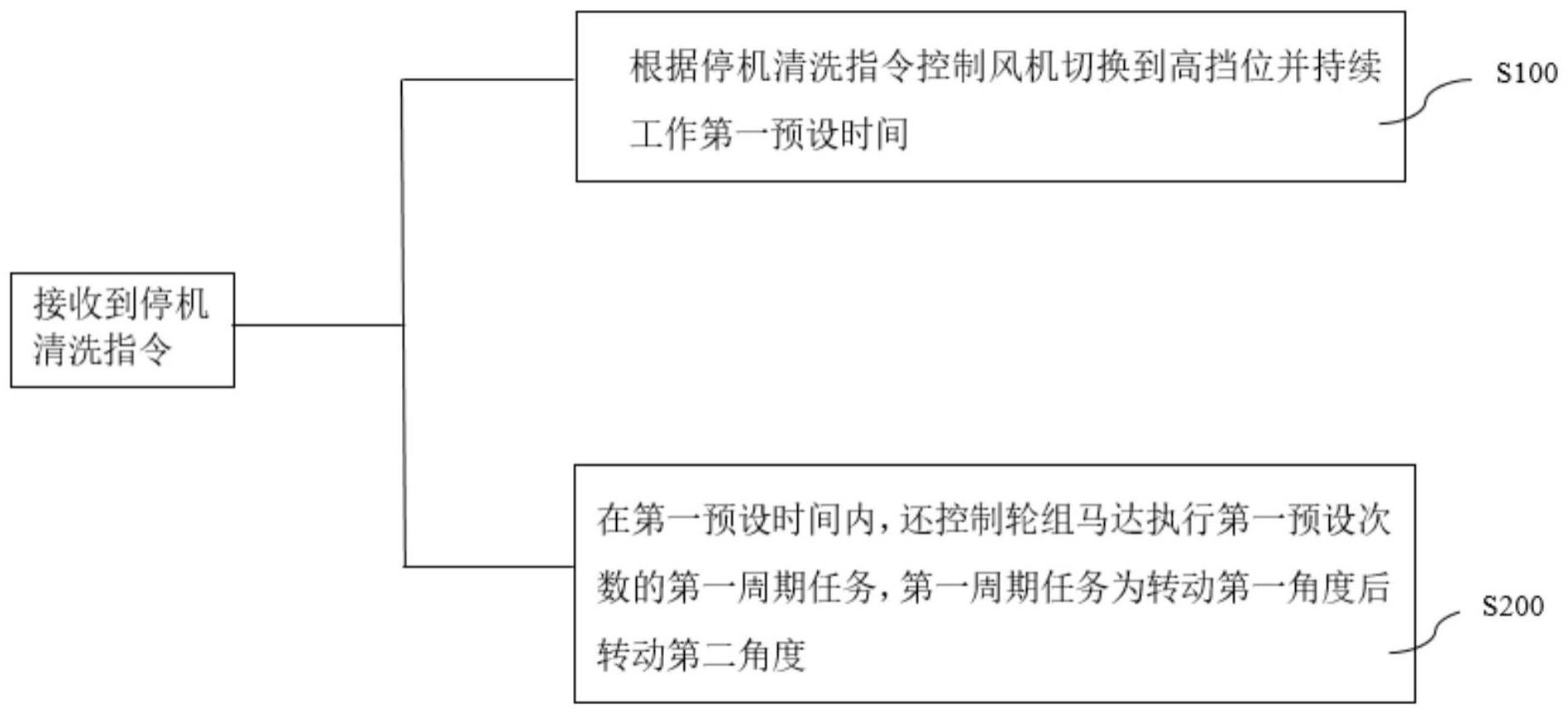
3、第一方面,本发明实施例提供了一种扫地机器人的停机清洗方法,包括:在清洗工况下,当接收到停机清洗指令时,根据所述停机清洗指令控制风机切换到高挡位并持续工作第一预设时间;在所述第一预设时间内,还控制轮组马达执行第一预设次数的第一周期任务,所述第一周期任务为转动第一角度后转动第二角度。
4、本发明上述第一方面的技术方案至少具有如下优点或有益效果之一:扫地机器人根据停机清洗指令控制风机切换到高挡位并持续工作第一预设时间,有利于风机吸扫地面留下顽固脏污和水渍,在第一预设时间内,还控制轮组马达执行第一预设次数的转动第一角度后转动第二角度,使得扫地机器人往预设方向移动,风机进一步对地面进行吸扫,防止清洁部件中残留的脏污和水渍掉落在地面上形成脏污水渍痕印,提高了扫地机器人的清洗质量。
5、进一步,所述根据所述停机清洗指令控制风机切换到高挡位并持续工作第一预设时间,包括:
6、在第一预设时间内,控制所述风机以高挡位持续工作;
7、或者;
8、在第一预设时间内,控制所述风机执行第二预设次数的第二周期任务,所述第二周期任务为以高挡位工作第四预设时间后以低挡位工作第五预设时间。
9、进一步,所述第一预设时间为8s至12s之间。
10、进一步,在所述第一预设时间内,所述轮组马达转动所述第一角度所需时间为第二预设时间,转动所述第二角度所需时间为第三预设时间。
11、进一步,所述第一预设次数和所述第二预设次数均为至少2次。
12、进一步,所述第一角度为逆时针180°,所述第二角度为顺时针180°。
13、进一步,在所述轮组马达逆时针转动的情况下,所述扫地机器人前进,在所述轮组马达顺时针转动的情况下,所述扫地机器人后退。
14、第二方面,本发明实施例提供了一种控制器,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器运行所述计算机程序时执行上述第一方面的技术方案所述的扫地机器人的停机清洗方法。
15、第三方面,本发明实施例提供了一种扫地机器人,包括上述第二方面的技术方案所述的控制器。
16、第四方面,本发明实施例提供了一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行上述第一方面的技术方案中所述的扫地机器人的停机清洗方法。
技术特征:
1.一种扫地机器人的停机清洗方法,其特征在于,包括:
2.根据权利要求1所述的扫地机器人的停机清洗方法,所述根据所述停机清洗指令控制风机切换到高挡位并持续工作第一预设时间,包括:
3.根据权利要求1所述的扫地机器人的停机清洗方法,其特征在于,所述第一预设时间为8s至12s之间。
4.根据权利要求2所述的扫地机器人的停机清洗方法,其特征在于,在所述第一预设时间内,所述轮组马达转动所述第一角度所需时间为第二预设时间,转动所述第二角度所需时间为第三预设时间。
5.根据权利要求2所述的扫地机器人的停机清洗方法,其特征在于,所述第一预设次数和所述第二预设次数均为至少2次。
6.根据权利要求1所述的扫地机器人的停机清洗方法,其特征在于,所述第一角度为逆时针180°,所述第二角度为顺时针180°。
7.根据权利要求6所述的扫地机器人的停机清洗方法,其特征在于,在所述轮组马达逆时针转动的情况下,所述扫地机器人前进,在所述轮组马达顺时针转动的情况下,所述扫地机器人后退。
8.一种控制器,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器运行所述计算机程序时执行如权利要求1至7中任意一项所述的扫地机器人的停机清洗方法。
9.一种扫地机器人,其特征在于:包括如权利要求8所述的控制器。
10.一种计算机可读存储介质,其特征在于:存储有计算机可执行指令,所述计算机可执行指令用于执行如权利要求1至7中任意一项所述的扫地机器人的停机清洗方法。
技术总结
本发明涉及扫地机器人领域,特别涉及一种扫地机器人的停机清洗方法、控制器及存储介质。其中,扫地机器人的停机清洗方法包括在清洗工况下,当接收到停机清洗指令时,根据停机清洗指令控制风机切换到高挡位并持续工作第一预设时间;在第一预设时间内,还控制轮组马达执行第一预设次数的第一周期任务,第一周期任务为转动第一角度后转动第二角度。控制风机以高挡位持续工作有利于扫地机器人高效吸扫地面和清洁部件中残留的顽固脏污和水渍,控制轮组马达转动第一角度后转动第二角度,使得扫地机器人往预设方向往返移动,风机进一步对地面和清洁部件吸扫清洁,有效防止清洁部件中残留的脏污和水痕遗漏到地面上,提高了扫地机器人的清洗质量。
技术研发人员:周劲松,段志平,蒙明,谢林明
受保护的技术使用者:广东贝尔斯顿智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!