清洁机的控制方法、控制装置及清洁机与流程
本发明涉及清洁,尤其涉及一种清洁机的控制方法、控制装置及清洁机。
背景技术:
1、目前,清洁机已经走入千家万户,人们利用清洁机对房屋、家具或者是宠物进行清洁操作,既方便又快捷;现有的清洁机,大都通过主机部为手持部提供水、清洁液等清洁介质,或者提供风力以及吸力用于烘干和吹干操作,手持部与主机部连接,但在清洁过程中,由于主机部较为笨重,并不具备跟随移动功能,用户在清洁完部分区域后,再进行移动较为麻烦。
技术实现思路
1、本发明提供一种清洁机的控制方法,用以解决现有技术中的上述问题。
2、本发明还提供一种清洁机的控制装置。
3、本发明还提供一种清洁机。
4、根据本发明第一方面提供的一种清洁机的控制方法,所述清洁机包括:主机部和手持部,所述主机部与所述手持部连接,用于为所述手持部供给清洁过程中所需的介质;
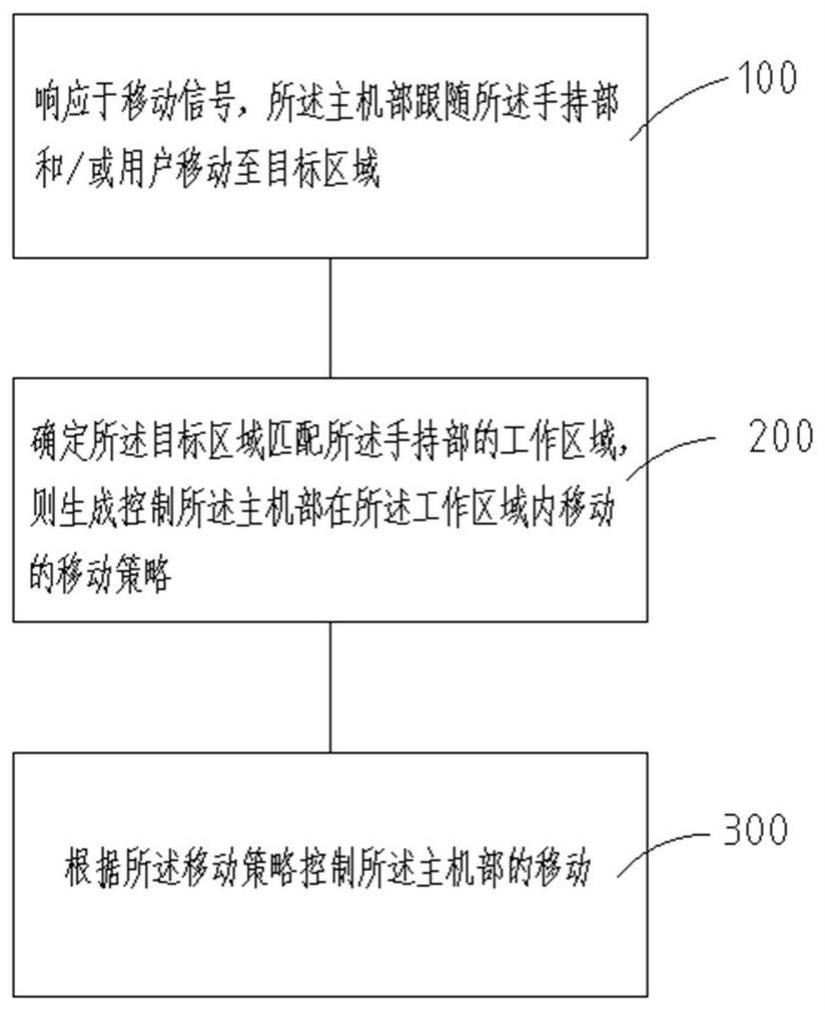
5、所述方法包括:响应于移动信号,所述主机部跟随所述手持部和/或用户移动至目标区域;确定所述目标区域匹配所述手持部的工作区域,则生成控制所述主机部在所述工作区域内移动的移动策略;根据所述移动策略控制所述主机部的移动。
6、根据本发明的一种实施例,所述响应于移动信号的步骤中,具体包括:响应于所述手持区域的握持信号,根据所述握持信号生成移动信号,其中,所述手持区域设置于所述手持部,用于为用户提供握持位置;或者,响应于启动按键的触发信号,根据所述触发信号生成移动信号。
7、根据本发明的一种实施例,所述主机部跟随所述手持部移动至目标区域的步骤中,具体包括:获取所述手持部在虚拟空间内的三维形貌特征,并确定所述手持部的第一初始位置信息;获取所述手持部在连续采集时间周期内的第一即时位置信息;确定所述第一初始位置信息和所述第一即时位置信息的位置偏移量满足预设偏移阈值,则根据所述第一即时位置信息确定目标区域。
8、根据本发明的一种实施例,所述主机部跟随所述用户移动至目标区域的步骤中,具体包括:获取所述用户的疑似人体特征,并提取所述疑似人体特征的人体标识特征;在连续采集时间周期内,获取所述人体标识特征的位置变化参数;根据所述人体标识特征和所述位置变化参数确定目标区域。
9、根据本发明的一种实施例,所述人体标识特征包括第一标识位置、第二标识位置和第三标识位置中至少一个或几个组合形成的位置信息;其中,所述第一标识位置为所述用户两脚之间的采集点;所述第二标识位置为所述用户背部的采集点;所述第三标识位置为所述用户两肩之间的采集点。
10、根据本发明的一种实施例,所述根据所述人体标识特征和所述位置变化参数确定目标区域的步骤中,具体包括:在连续采集时间周期内,获取所述手持部的第二初始位置信息和第二即时位置信息;根据所述第二初始位置信息、所述第二即时位置信息和所述位置变化参数进行判断;确定所述手持部和所述疑似人体特征的空间位置距离大于预设距离阈值,则丢弃所述疑似人体特征,并重新确定所述目标区域。
11、根据本发明的一种实施例,所述确定所述目标区域匹配所述手持部的工作区域的步骤中,具体包括:获取所述手持部的预设工作模式,并提取所述手持部对应所述预设工作模式的运行范围参数;确定所述运行范围参数与所述目标区域匹配,则判定所述目标区域与所述工作区域匹配;确定所述运行范围参数与所述目标区域不匹配,则根据所述运行范围参数生成所述工作区域,并根据所述工作区域和所述目标区域调整所述主机部的位置。
12、根据本发明的一种实施例,所述生成控制所述主机部在所述工作区域内移动的移动策略的步骤中,具体包括:在连续采集时间周期内,获取所述手持部的第三初始位置信息和第三即时位置信息;根据所述第三初始位置信息和所述第三即时位置信息生成所述手持部的即时移动参数;获取所述预设工作模式对应的所述手持部的预设移动参数;确定所述即时移动参数和所述预设移动参数不匹配,则所述主机部发出报警信号。
13、根据本发明的一种实施例,所述根据所述移动策略控制所述主机部的移动的步骤之后,具体还包括:获取所述主机部所在预设范围内的环境特征信息;根据所述环境特征信息控制所述主机部在所述工作区域移动过程中避开障碍物。
14、根据本发明第二方面提供的一种清洁机的控制装置,包括:响应获取模块、策略生成模块和策略执行模块;所述响应获取模块用于响应于移动信号,主机部跟随手持部和/或用户移动至目标区域;所述策略生成模块用于确定所述目标区域匹配所述手持部的工作区域,则生成控制所述主机部在所述工作区域内移动的移动策略;所述策略执行模块用于根据所述移动策略控制所述主机部的移动。
15、根据本发明第三方面提供的一种清洁机,执行控制时,采用上述的清洁机的控制方法,或者包括上述的清洁机的控制装置。
16、本发明中的上述一个或多个技术方案,至少具有如下技术效果之一:本发明提供的清洁机的控制方法、控制装置及清洁机,主机部在当接收到用户的移动信号之后,便可以跟随手持部和/或用户移动至目标区域,并根据目标区域匹配手持部的工作区域,生成移动策略,根据移动策略控制主机部进行移动。本发明控制主机部跟随手持部移动,无需用户自行移动主机部,可以有效提高清洁效率。
技术特征:
1.一种清洁机的控制方法,其特征在于,所述清洁机包括:主机部和手持部,所述主机部与所述手持部连接,用于为所述手持部供给清洁过程中所需的介质;
2.根据权利要求1所述的清洁机的控制方法,其特征在于,所述响应于移动信号的步骤中,具体包括:
3.根据权利要求1所述的清洁机的控制方法,其特征在于,所述主机部跟随所述手持部移动至目标区域的步骤中,具体包括:
4.根据权利要求1所述的清洁机的控制方法,其特征在于,所述主机部跟随所述用户移动至目标区域的步骤中,具体包括:
5.根据权利要求4所述的清洁机的控制方法,其特征在于,所述人体标识特征包括第一标识位置、第二标识位置和第三标识位置中至少一个或几个组合形成的位置信息;
6.根据权利要求4所述的清洁机的控制方法,其特征在于,所述根据所述人体标识特征和所述位置变化参数确定目标区域的步骤中,具体包括:
7.根据权利要求1至6任一所述的清洁机的控制方法,其特征在于,所述确定所述目标区域匹配所述手持部的工作区域的步骤中,具体包括:
8.根据权利要求7所述的清洁机的控制方法,其特征在于,所述生成控制所述主机部在所述工作区域内移动的移动策略的步骤中,具体包括:
9.根据权利要求1至6任一所述的清洁机的控制方法,其特征在于,所述根据所述移动策略控制所述主机部的移动的步骤之后,具体还包括:
10.一种清洁机的控制装置,其特征在于,包括:响应获取模块、策略生成模块和策略执行模块;
11.一种清洁机,其特征在于,执行控制时,采用上述权利要求1至9任一所述的清洁机的控制方法,或者包括上述权利要求10所述的清洁机的控制装置。
技术总结
本发明提供一种清洁机的控制方法、控制装置及清洁机,清洁机包括:主机部和手持部,所述主机部与所述手持部连接,用于为所述手持部供给清洁过程中所需的介质;方法包括:响应于移动信号,主机部跟随手持部和/或用户移动至目标区域;确定目标区域匹配手持部的工作区域,则生成控制主机部在工作区域内移动的移动策略;根据移动策略控制主机部的移动。本发明的主机部在当接收到用户的移动信号之后,便可以跟随手持部和/或用户移动至目标区域,并根据目标区域匹配手持部的工作区域,生成移动策略,根据移动策略控制主机部进行移动。本发明控制主机部跟随手持部移动,无需用户自行移动主机部,可以有效提高清洁效率,且提升用户使用体验。
技术研发人员:鲜策,刘超,张夕军,王福坤
受保护的技术使用者:海尔机器人科技(青岛)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!