一种点茶设备及其通过手握状态实现自启的控制方法与流程
本发明涉及点茶领域,特别是一种点茶设备及其通过手握状态实现自启的控制方法。
背景技术:
1、点茶,唐、宋时的一种煮茶方法。古时,点茶与点汤成为朝廷官场待下之礼,点茶法是宋代斗茶所用的方法,茶人自己饮用亦用此法。这时不再直接将茶放入釜中熟煮,而是先将饼茶碾碎,置碗中待用。以釜烧水,微沸初漾时即冲点碗中的茶。为了使茶末与水交融成一体,于是就发明了一种用细竹制作的工具,称为“茶筅”。
2、随着人们生活的提高,现有的一些自动点茶设备已经取代了传统的茶筅,或将茶筅与相应设备结合实现搅拌摆动等动作,但是现有的一些自动点茶设备在点茶的时候虽然搅拌过程被自动点茶设备代替,但是还有在搅拌的时候手动控制搅拌的频率或者摆动角度等,比较麻烦,而搅拌频率的快慢和搅拌角度的大小对最后茶水的味道的会有较大的影响,为此我们提供一种点茶设备及其通过手握状态实现自启的控制方法来解决上述问题。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种点茶设备及其通过手握状态实现自启的控制方法。
2、本发明的目的通过以下技术方案来实现:
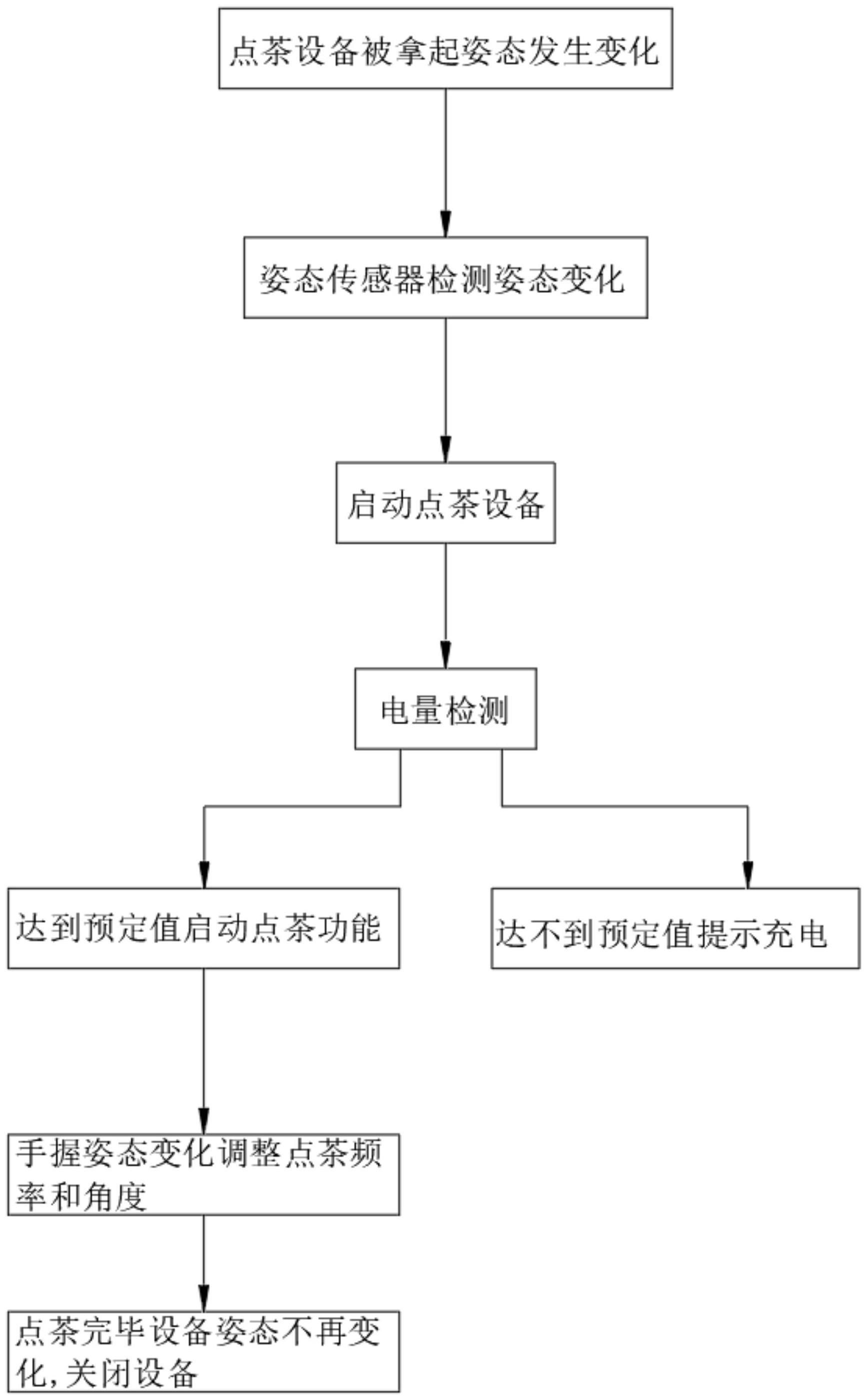
3、一种通过手握状态实现自启的控制方法,包括:
4、通过位于设备内姿态传感器检测点茶设备的姿态变化;
5、姿态发生变化启动点茶设备并对点茶设备的电量进行检测;
6、电量达到预定值则启动点茶功能,若达不到则提示充电;
7、点茶功能启动后通过手握姿态变化调整点茶摆动频率和/或角度;
8、点茶完毕后姿态传感器检测设备姿态不再变化则关闭设备。
9、优选的,所述手握姿态为竖直向下状态,且随着该姿态维持时间增长逐渐增大茶筅摆动频率和/或角度。
10、优选的,所述竖直向下状态超过十秒,茶筅摆动频率和角度达到最大值。
11、优选的,所述摆动频率最大值为每秒6次,角度最大值为末端位移量最大为60mm。
12、优选的,所述姿态传感器检测点茶设备的重力加速度和/或角度变化。
13、优选的,所述重力加速度为0.1g,角度变化量为5度。
14、优选的,所述竖直状态的竖直误差角度范围为3~7度。
15、优选的,所述设备姿态不再变化10秒后关闭设备。
16、优选的,所述设备姿态不再变化10秒后关闭设备。
17、本发明还提供一种点茶设备,包括上述所述的一种通过手握状态实现自启的控制方法,还包括电池、姿态传感器、电机、摆动机构和茶筅,所述茶筅与摆动机构连接,电机带动所述摆动机构进行摆动。
18、本发明具有以下优点:
19、1、本发明通过姿态传感器检测到点茶设备的姿态变化从而启动该设备,并且通过人手握点茶设备的变化调整相应的摆动频率和角度,实现自动启动和点茶,不需要人工进行手动启动以及手动调节点茶的频率和/角度等参数,实现智能化,方便使用者使用。
20、2、本发明通过可以手握点茶设备的竖直向下带动姿态启动该设备的茶筅摆动,并且在竖直状态下在一定时间内茶筅摆动频率和角度逐渐增大,提高点茶的效率,节省点茶时间。
技术特征:
1.一种通过手握状态实现自启的控制方法,其特征在于,包括:
2.根据权利要求1所述的一种通过手握状态实现自启的控制方法,其特征在于:所述手握姿态为竖直向下状态,且随着该姿态维持时间增长逐渐增大茶筅摆动频率和/或角度。
3.根据权利要求2所述的一种通过手握状态实现自启的控制方法,其特征在于:所述竖直向下状态超过十秒,茶筅摆动频率和角度达到最大值。
4.根据权利要求3所述的一种通过手握状态实现自启的控制方法,其特征在于:所述摆动频率最大值为每秒6次,角度最大值为末端位移量最大为60mm。
5.根据权利要求1所述的一种通过手握状态实现自启的控制方法,其特征在于:所述姿态传感器检测点茶设备的重力加速度和/或角度变化。
6.根据权利要求5所述的一种通过手握状态实现自启的控制方法,其特征在于:所述重力加速度为0.1g,角度变化量为5度。
7.根据权利要求2所述的一种通过手握状态实现自启的控制方法,其特征在于:所述竖直状态的竖直误差角度范围为3~7度。
8.根据权利要求1所述的一种通过手握状态实现自启的控制方法,其特征在于:所述设备姿态不再变化10秒后关闭设备。
9.根据权利要求1所述的一种通过手握状态实现自启的控制方法,其特征在于:所述电量预定值为10%。
10.一种点茶设备,包括权利要求1至9任一项所述的一种通过手握状态实现自启的控制方法,其特征在于:还包括电池、姿态传感器、电机、摆动机构和茶筅,所述茶筅与摆动机构连接,电机带动所述摆动机构进行摆动。
技术总结
本发明公开了一种点茶设备及其通过手握状态实现自启的控制方法,包括通过位于设备内姿态传感器检测点茶设备的姿态变化;姿态发生变化启动点茶设备并对点茶设备的电量进行检测;电量达到预定值则启动点茶功能,若达不到则提示充电;点茶功能启动后通过手握姿态变化调整点茶摆动频率和/或角度;点茶完毕后姿态传感器检测设备姿态不再变化则关闭设备。本发明的有益效果是:通过姿态传感器检测到点茶设备的姿态变化从而启动该设备,并且通过人手握点茶设备的变化调整相应的摆动频率和角度,实现自动启动和点茶,不需要人工进行手动启动以及手动调节点茶的频率和/角度等参数,实现智能化,方便使用者使用。
技术研发人员:叶腾,李权,刘小川
受保护的技术使用者:厦门盈趣科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!