一种使用机械臂进行饮品摇匀的控制方法及摇匀系统与流程
本发明属于饮品自动制作领域,具体涉及一种使用机械臂进行饮品摇匀的控制方法及摇匀系统。
背景技术:
1、现有的饮品自动制作设备中,其往往将多种饮品原料集合在一搅拌容器内,再搅拌混合均匀制成饮品。
2、北京精密机电控制设备研究所在专利号为201910019402.9的专利提案中公开了一种抓取式全自动搅拌、清洗饮品制作装置及制作方法,机械臂在机械臂控制器的控制下进行多自由度的运动;在机械臂控制器控制下抓取并电气连接搅拌装置;机械臂控制器控制机械臂带动搅拌装置置于各个落料点接取物料,开始接料同时开始搅拌,持续搅拌设定时常后,停止搅拌;接料完成后机械臂带动搅拌装置转移到交付位置,待搅拌停止后,将搅拌装置内的物料倾倒转移至交付位置;并自动进行清洗。全程无人参与,有助于极大提高制作目标生产效率和单位时间的制作效率。在机械臂运动的同时,同步进行搅拌或搅匀,既能充分进行搅拌,又能提高制作效率。本发明搅拌完成后能够进行高温旋转式冲洗,避免了高频率更换搅拌杯的繁琐工作。拌杯杯体为圆柱形或者开口大的圆台体,内有均布肋边,数量m>3,肋边高度为杯体搅拌舱高度的1/3~1/2,为肋片结构,肋边作用为将搅拌装置内的液体形成紊流,更有利于搅散介质,另一个作用是增加搅拌装置的刚度,防止变形过大形成破坏。杯体内设计有加强筋特征,要求特征尺寸m1<m2,肋片结构上小下大,纵截面为梯形。
3、上海大界机器人科技有限公司在cn201811446263.x种饮料制作设备、系统及其控制方法。所述设备包括:安装支架,用于所述制作设备各组件的安装固定;第一饮料容器,用于盛放一种或者多种饮料原料;第二饮料容器,用于饮料制作过程中饮料的盛放;第一机械臂,所述第一机械臂的操作端设置有注射装置;第二机械臂,用于饮料制作过程中所述第二饮料容器的在各工位间的输送,以实现将饮料原料分装入所述第二饮料容器;以及控制系统,可接收饮料制作指令,并根据所述饮料制作指令控制上述各部件协同配合,以制作出指定的饮料。本发明通过传递装置与注射装置的相互配合,可以实现饮料自动制作,能够制作出多种配比的饮料,且制作过程智能化高,吸引顾客。
4、但是,在使用机械臂是如何自动实现将饮品的各组合成分充分融合且不摇洒出来,且用于混匀的容器是饮品出品给用户的最终容器,这是本控制体系的难点。
技术实现思路
1、本发明为了解决背景技术中所提出的技术问题,提供了一种使用机械臂进行饮品摇匀的控制系统及摇匀方法。
2、本发明的技术方案为:
3、一种使用机械臂进行饮品摇匀的控制方法,其特征在于,包括以下步骤:
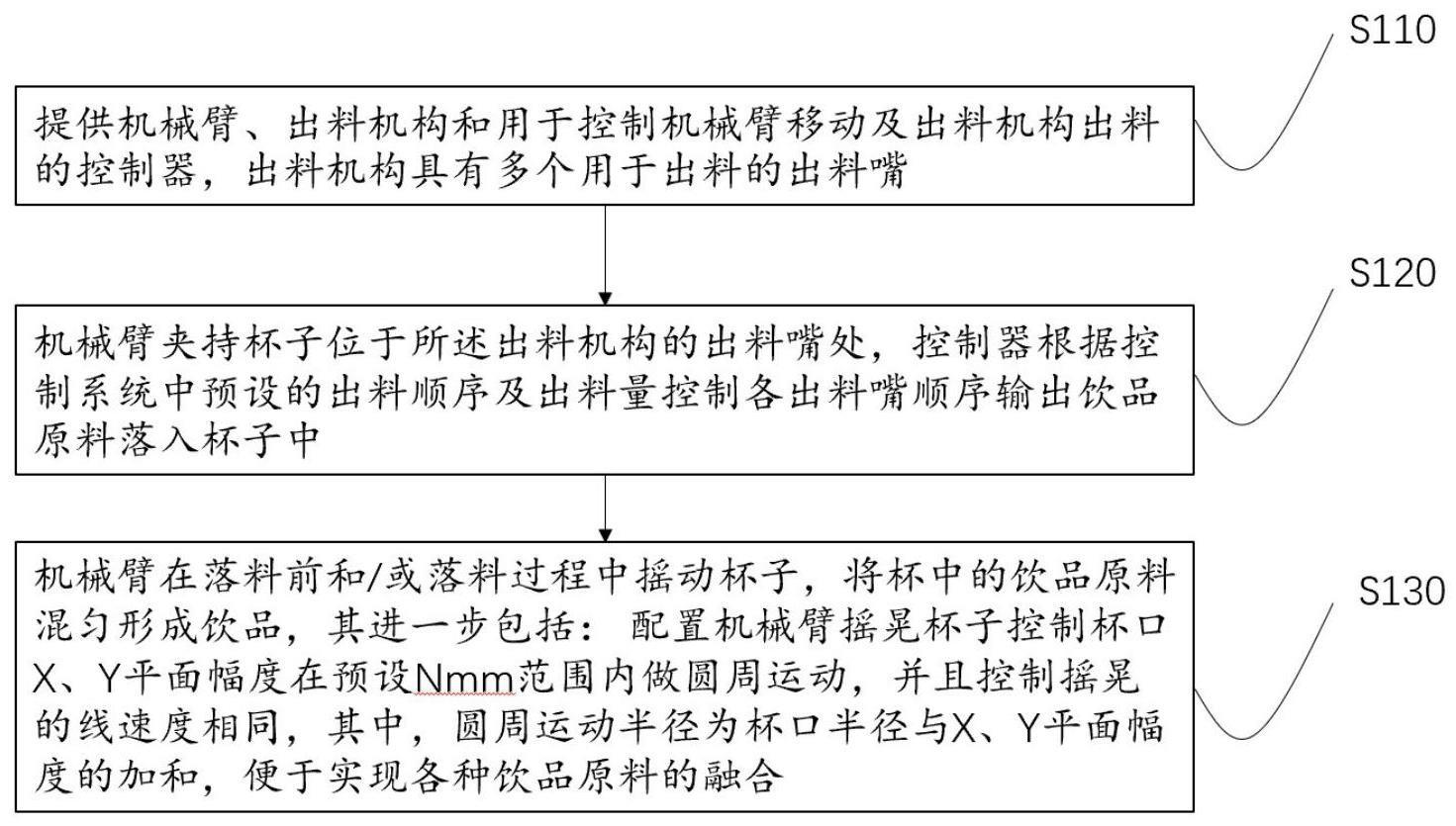
4、提供机械臂、用于储存和输出饮品原料的出料机构和用于控制所述机械臂移动及所述出料机构出料的控制器,所述出料机构具有多个用于出料的出料嘴;
5、机械臂夹持杯子位于所述出料机构的出料嘴处,所述控制器根据控制系统中预设的出料顺序及出料量控制各所述出料嘴顺序输出饮品原料落入杯子中,
6、所述机械臂在落料前和/或落料过程中摇动杯子,将杯中的饮品原料混匀形成饮品,其进一步包括:配置机械臂摇晃杯子控制杯口x、y平面幅度在预设nmm范围内做圆周运动,其中,圆周运动半径为杯口半径与x、y平面幅度的加和,便于实现各种饮品原料的融合。
7、较佳地,设置出料嘴包括粉、出浆口、出咖啡口和出奶口在内的出口位于在机械臂最小运动半径内,所有出口位于杯口两侧减去摇晃x,y平面幅度,其中,出粉口末端存在一个斜口,便于粉有效流向饮品杯中。
8、较佳地,并且控制摇晃的线速度相同。
9、较佳地,设置机械臂为包括第一机械手指和第二机械手指组成的机械手指结构,保障杯子的杯沿位于机械手指上来设置机械手指开合距离;
10、机械手指未夹紧杯身且与杯身有间隙或贴设于杯身,通过设定机械手指结构的开合距离卡在所述杯子的杯沿内,以实现晃动饮品以控制杯体的晃动幅度。
11、一种使用机械臂进行饮品摇匀的控制系统,其特征在于:包括:
12、用于储存和输出饮品原料的出料机构,所述出料机构具有多个用于出料的出料嘴;
13、用于摇匀饮品的机械臂;
14、用于摇匀饮品的容器可为出品给最终用户的容器,包括一次性纸杯、塑料杯、陶瓷杯、玻璃杯等;
15、用于控制所述机械臂移动及所述出料机构出料的控制器;所述控制器与所述出料机构、所述机械臂连接;所述机械臂夹持杯子位于所述出料机构的出料嘴处,所述控制器根据控制系统中预设的出料顺序及出料量控制各所述出料嘴顺序输出饮品原料落入杯子中,所述机械臂在落料前和/或落料过程中摇动杯子,并且配置机械臂摇晃杯子控制杯口x、y平面幅度在预设nmm范围内做圆周运动,其中,圆周运动半径为杯口半径与x、y平面幅度的加和,便于实现各种饮品原料的融合。较佳地,被配置控制摇晃的线速度相同。
16、本发明提供了一种使用机械臂进行饮品摇匀的控制系统及摇匀方法,使其与现有技术相比具有以下的优点和积极效果:
17、本申请人认为粉、浆等固液混合的核心为充分混匀,考虑一些化学实验中右手掌心顶住试管口,五指拿紧试管,利用腕力使管向同一个方向做圆周运动,使管内液体造成旋涡而混匀之。该法适用于试管中液体较多。为此,本申请人经过多次试验,圆周运动半径为杯口半径与x、y平面幅度的加和,控制摇晃的线速度相同,使管内液体造成旋涡而混匀之。并且,摇晃杯子控制杯口x、y平面幅度在预设nmm范围不容易晃出。出料嘴包括粉、出浆口、出咖啡口和出奶口在内的出口位于在机械臂最小运动半径内,所有出口位于杯口两侧减去摇晃x,y平面幅度。由此达到在使用机械臂自动实现将饮品的各组合成分充分融合且不摇洒出来的功效。由于用于摇匀饮品的容器为出品给最终用户的容器,消除了传统摇匀设备需要清洗后再利用的问题,增加了整个系统的食品安全。
技术特征:
1.一种使用机械臂进行饮品摇匀的控制方法,其特征在于,包括以下步骤:
2.如权项1所述的使用机械臂进行饮品摇匀的控制方法,其特征在于,还包括:
3.如权项1或2所述的使用机械臂进行饮品摇匀的控制方法,其特征在于,配置机械臂摇晃杯子控制杯口x、y平面幅度在预设nmm范围内做圆周运动进一步包括控制摇晃的线速度相同。
4.如权项1所述的使用机械臂进行饮品摇匀的控制方法,其特征在于,械臂夹持杯子位于所述出料机构的出料嘴处,所述控制器根据控制系统中预设的出料顺序及出料量控制各所述出料嘴顺序输出饮品原料落入杯子中进一步包括:
5.如权项4所述的使用机械臂进行饮品摇匀的控制方法,其特征在于,所述机械臂在落料前和/或落料过程中摇动杯子,将杯中的饮品原料混匀形成饮品,具体为:
6.如权利要求1或5所述的方法,其特征在于,所述控制器控制所述机械臂夹持杯子进一步包括:
7.一种使用机械臂进行饮品摇匀的控制系统,其特征在于:包括:
8.如权利要求7所述的系统,其特征在于,出料嘴包括粉、出浆口、出咖啡口和出奶口在内的出口位于在机械臂最小运动半径内,所有出口位于杯口两侧减去摇晃x,y平面幅度。
9.如权利要求8所述的系统,其特征在于,其中,配置机械臂摇晃杯子控制杯口x、y平面幅度在预设nmm范围内做圆周运动进一步包括配置控制摇晃的线速度相同。
10.如权利要求7所述的系统,其特征在于,还包括:
技术总结
本发明公开了一种使用机械臂进行饮品摇匀的控制系统及摇匀方法,机械臂在落料前和/或落料过程中摇动杯子,将杯中的饮品原料混匀形成饮品,其进一步包括:配置机械臂摇晃杯子控制杯口X、Y平面幅度在预设Nmm范围内做圆周运动,并且控制摇晃的线速度相同,其中,圆周运动半径为杯口半径与X、Y平面幅度的加和,便于实现各种饮品原料的融合。设置出料嘴包括粉、出浆口、出咖啡口和出奶口在内的出口位于在机械臂最小运动半径内,所有出口位于杯口两侧减去摇晃X,Y平面幅度;本发明中,使用机械臂是自动实现将饮品的各组合成分充分融合且不摇洒出来的。
技术研发人员:孙琪昀
受保护的技术使用者:上海氦豚机器人科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!