回充控制方法、扫地系统、计算机设备和存储介质与流程
本申请涉及智能家居,特别是涉及一种回充控制方法、扫地系统、计算机设备和存储介质。
背景技术:
1、扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家电的一种,能凭借人工智能,自动在房间内完成地板清理工作。随着扫地机器人技术的发展,扫地机器人能够实现自动回充。目前,扫地机器人回充技术一般都是采用红外信号识别原理。红外信号识别原理是采用38k载波外加红外编码数据。然而,红外信号编码在小区域或者复杂的环境内会反射,发射的信号与源码重叠后形成干扰导致扫地机器人接收不到信号。另外,红外信号编码还会受到其他红外遥控器或者其他红外发射器的信号干扰而导致扫地机器人接收不到信号。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够精确自行回充的回充控制方法、扫地系统、计算机设备和存储介质。
2、一种回充控制方法,方法应用于扫地机器人,方法包括以下步骤:
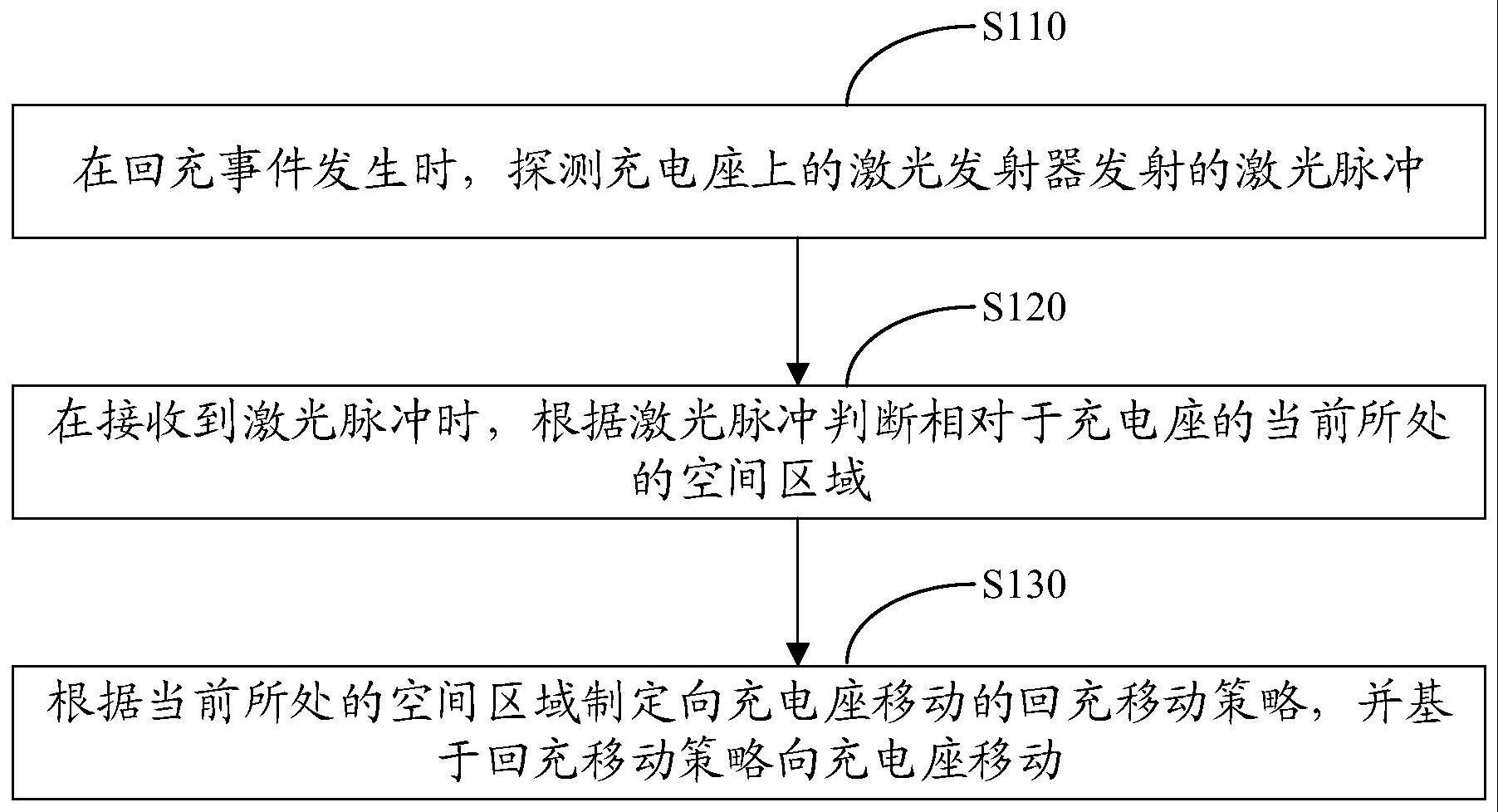
3、在回充事件发生时,探测充电座上的激光发射器发射的激光脉冲;
4、在接收到激光脉冲时,根据激光脉冲判断相对于充电座的当前所处的空间区域;空间区域为对激光发射器的扫射范围按预设规则划分而成;
5、根据当前所处的空间区域制定向充电座移动的回充移动策略,并基于回充移动策略向充电座移动。
6、在其中一个实施例中,方法还包括步骤:
7、在回充事件发生时开始计时,若计时时长等于预设时长时未接收到激光脉冲,则向第一方向移动预设距离;
8、在移动预设距离时重新开始计时,若计时时长等于预设时长时未接收到激光脉冲,则向不同于第一方向的第二方向移动预设距离;
9、直至接收到激光脉冲。
10、在其中一个实施例中,方法还包括步骤:
11、在接收到两种或者两种以上不同格式的激光脉冲时,获取不同格式的激光脉冲对应的空间区域;
12、将不同格式的激光脉冲对应的空间区域中距离扫射范围中心区域最近的空间区域,作为相对于充电座的当前所处的空间区域。
13、在其中一个实施例中,方法还包括步骤:
14、在回充事件发生时,向充电桩发送激光控制指令,以指示充电桩启动激光发射器发射激光脉冲。
15、在其中一个实施例中,在接收到激光脉冲时,根据激光脉冲判断相对于充电座的当前所处的空间区域的步骤中,包括:
16、在接收到激光脉冲时,根据激光脉冲的脉宽和频率,判断相对于充电座的当前所处的空间区域;各空间区域内的激光脉冲的脉宽和周期各不相同。
17、在其中一个实施例中,回充移动策略为:从当前所处的空间区域向扫射范围中心区域移动,并在移动到扫射范围中心区域后,从扫射范围中心区域向充电座移动。
18、在其中一个实施例中,预设规则为:空间区域的角度等于或大于对应激光脉冲的脉冲周期乘于激光发射器的扫射转速得到的乘积值;空间区域的角度从远离扫射范围中心区域逐渐增大。
19、一种扫地系统,包括扫地机器人和充电座;扫地机器人包括激光接收器;充电座包括激光发射组件;激光发射组件包括激光发射器;激光发射器在预设角度范围内扫射;
20、扫地机器人在回充事件发生时,探测激光发射器发射的激光脉冲;
21、扫地机器人在接收到激光脉冲时,根据激光脉冲判断相对于充电座的当前所处的空间区域;空间区域为对激光发射器的扫射范围按预设规则划分而成;
22、扫地机器人根据当前所处的空间区域制定向充电座移动的回充移动策略,并基于回充移动策略向充电座移动。
23、在其中一个实施例中,激光发射组件设置于充电座的顶部,且激光发射器的扫射范围在充电座上的回收口面向的一侧内;
24、激光发射组件还包括电机、转动座和转动带;激光发射器设置于转动座上;电机通过转动带带动转动座;激光发射器从一个空间区域转动到另一个空间区域时变换激光脉冲的格式;各空间区域的激光脉冲的格式各不相同。
25、在其中一个实施例中,预设角度范围为120度至240度。
26、一种计算机设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现回充控制方法的步骤。
27、一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现回充控制方法的步骤。
28、上述技术方案中的一个技术方案具有如下优点和有益效果:
29、本申请各实施例提供的回充控制方法应用于扫地机器人。扫地机器人运行过程中,在监测到回充事件发生时,探测充电座上的激光发射器发射的激光脉冲;在接收到激光脉冲时,根据激光脉冲判断相对于充电座的当前所处的空间区域;根据当前所处的空间区域制定向充电座移动的回充移动策略,并基于回充移动策略向充电座移动。为了实现本申请回充控制方法,预先对激光发射器的扫射范围按预设规则划分而成,激光发射器在扫射范围扫射,扫地机器人接收激光发射器发射的激光脉冲,利用激光脉冲的特性判断自身相对于充电座的相对空间区域,从而制定向充电座移动的策略实现回充,本申请通过对充电座面向的区域进行区域划分,并结合激光信号的特性,避免无法接收到信号或者接收到的信号混乱的情况,提升回充的成功率、效率以及准确度。
技术特征:
1.一种回充控制方法,其特征在于,所述方法应用于扫地机器人,所述方法包括以下步骤:
2.根据权利要求1所述的回充控制方法,其特征在于,所述方法还包括步骤:
3.根据权利要求1所述的回充控制方法,其特征在于,所述方法还包括步骤:
4.根据权利要求1所述的回充控制方法,其特征在于,所述方法还包括步骤:
5.根据权利要求1所述的回充控制方法,其特征在于,所述在接收到所述激光脉冲时,根据所述激光脉冲判断相对于所述充电座的当前所处的空间区域的步骤中,包括:
6.根据权利要求1至5任意一项所述的回充控制方法,其特征在于,所述回充移动策略为:从所述当前所处的空间区域向所述扫射范围中心区域移动,并在移动到所述扫射范围中心区域后,从所述扫射范围中心区域向所述充电座移动。
7.根据权利要求1至5任意一项所述的回充控制方法,其特征在于,所述预设规则为:所述空间区域的角度等于或大于对应所述激光脉冲的脉冲周期乘于所述激光发射器的扫射转速得到的乘积值;所述空间区域的角度从远离所述扫射范围中心区域逐渐增大。
8.一种扫地系统,其特征在于,包括扫地机器人和充电座;所述扫地机器人包括激光接收器;所述充电座包括激光发射组件;所述激光发射组件包括激光发射器;所述激光发射器在预设角度范围内扫射;
9.根据权利要求8所述的扫地系统,其特征在于,所述激光发射组件设置于所述充电座的顶部,且所述激光发射器的扫射范围在所述充电座上的回收口面向的一侧内;
10.根据权利要求8或9所述的扫地系统,其特征在于,所述预设角度范围为120度至240度。
11.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
12.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种回充控制方法、扫地系统、计算机设备和存储介质。所述方法包括:在回充事件发生时,探测充电座上的激光发射器发射的激光脉冲;在接收到激光脉冲时,根据激光脉冲判断相对于充电座的当前所处的空间区域;根据当前所处的空间区域制定向充电座移动的回充移动策略,并基于回充移动策略向充电座移动。为了实现本申请回充控制方法,预先对激光发射器的扫射范围按预设规则划分而成,激光发射器在扫射范围扫射,扫地机器人接收激光发射器发射的激光脉冲,利用激光脉冲的特性判断自身相对于充电座的相对空间区域,从而制定向充电座移动的策略实现回充,避免无法接收到信号或者接收到的信号混乱的情况,提升回充的成功率、效率以及准确度。
技术研发人员:杨阳,任娟娟,叶力荣
受保护的技术使用者:深圳银星智能集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!