一种扫地机器人的控制方法及系统与流程
本发明涉及智能清扫设备,具体而言,涉及一种扫地机器人的控制方法及系统。
背景技术:
1、随着科技的快速发展,扫地机器人开始居家生活中的常用清洁设备。现有的扫地机器人主要包括两种,即地面清扫式、空中清扫式,而前者的相关技术已经较为完善,市场上也主要是这类产品。后者的空中清扫式扫地机器人是未来的研发热点,因为其可以不受被清扫对象的高度等的限制,能够提供更为完善的清扫方案。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供了一种扫地机器人的控制方法、系统、电子设备及计算机存储介质。
2、本发明的第一方面提供了一种扫地机器人的控制方法,包括如下步骤:根据待清扫区域的图像数据提取镜面对象的第一特征数据;根据所述第一特征数据确定针对所述镜面对象的清扫方案;控制扫地机器人执行所述清扫方案;其中,所述清扫方案用于使所述扫地机器人无法从所述镜面对象中拍摄到自身的虚像。
3、进一步地,所述根据待清扫区域的图像数据提取镜面对象的第一特征数据之前,还包括:对待清扫区域的图像数据进行识别处理,以提取出若干目标对象及对应的第二特征数据;根据所述第二特征数据判断所述目标对象是否为所述镜面对象。
4、进一步地,所述根据所述第一特征数据确定针对所述镜面对象的清扫方案,包括:根据所述第一特征数据计算所述镜面对象的尺寸数据,根据所述尺寸数据确定针对所述镜面对象的清扫方案。
5、进一步地,所述根据所述尺寸数据确定针对所述镜面对象的清扫方案,包括:根据所述尺寸数据确定所述镜面对象的宽度和/或长度,若所述宽度和/或长度小于或等于预设阈值,则生成针对所述镜面对象的第一清扫方案;否则,生成针对所述镜面对象的第二清扫方案。
6、进一步地,当执行所述第一清扫方案时,所述控制扫地机器人执行所述清扫方案,包括:所述扫地机器人根据第一作业轨迹控制可调节清扫范围的清扫部件对所述镜面对象进行清扫;其中,所述第一作业轨迹位于所述镜面对象的侧面,且使得所述扫地机器人无法从所述镜面对象中拍摄到自身的虚像。
7、进一步地,当执行所述第二清扫方案时,所述控制扫地机器人执行所述清扫方案,包括:所述扫地机器人将拍摄图像中的镜面区域模糊化处理,并根据第二作业轨迹控制清扫部件对所述镜面对象进行清扫;其中,所述第二作业轨迹位于所述镜面对象的正面。
8、进一步地,所述扫地机器人为地面式扫地机器人或飞行式扫地机器人。
9、本发明的第二方面提供了一种扫地机器人的控制系统,包括处理模块、存储模块、获取模块,所述处理模块与所述存储模块、所述获取模块连接;其中,所述存储模块,用于存储可执行的计算机程序代码;所述获取模块,用于获取待清扫区域的图像数据,并传输给所述处理模块;所述处理模块,用于通过调用所述存储模块中的所述可执行的计算机程序代码,执行如前所述的方法。
10、本发明的第三方面提供了一种电子设备,包括:存储有可执行程序代码的存储器;与所述存储器耦合的处理器;所述处理器调用所述存储器中存储的所述可执行程序代码,执行如前任一项所述的方法。
11、本发明的第四方面提供了一种计算机存储介质,该存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上任一项所述的方法。
12、本发明的方案中,本发明中的扫地机器人根据拍摄的图像数据提取镜面对象额特征数据,据此确定针对镜面对象的合理的清扫方案,而扫地机器人在执行该方案时能够不拍摄到自身在镜面中的虚像,进而也就不会针对虚像而实施避障措施,也就达到了高稳定性姿态控制的技术效果。
技术特征:
1.一种扫地机器人的控制方法,其特征在于,包括如下步骤:根据待清扫区域的图像数据提取镜面对象的第一特征数据;根据所述第一特征数据确定针对所述镜面对象的清扫方案;控制扫地机器人执行所述清扫方案;其中,所述清扫方案用于使所述扫地机器人无法从所述镜面对象中拍摄到自身的虚像。
2.根据权利要求1所述的一种扫地机器人的控制方法,其特征在于:所述根据待清扫区域的图像数据提取镜面对象的第一特征数据之前,还包括:对待清扫区域的图像数据进行识别处理,以提取出若干目标对象及对应的第二特征数据;根据所述第二特征数据判断所述目标对象是否为所述镜面对象。
3.根据权利要求1或2所述的一种扫地机器人的控制方法,其特征在于:所述根据所述第一特征数据确定针对所述镜面对象的清扫方案,包括:根据所述第一特征数据计算所述镜面对象的尺寸数据,根据所述尺寸数据确定针对所述镜面对象的清扫方案。
4.根据权利要求3所述的一种扫地机器人的控制方法,其特征在于:所述根据所述尺寸数据确定针对所述镜面对象的清扫方案,包括:根据所述尺寸数据确定所述镜面对象的宽度和/或长度,若所述宽度和/或长度小于或等于预设阈值,则生成针对所述镜面对象的第一清扫方案;否则,生成针对所述镜面对象的第二清扫方案。
5.根据权利要求4所述的一种扫地机器人的控制方法,其特征在于:当执行所述第一清扫方案时,所述控制扫地机器人执行所述清扫方案,包括:所述扫地机器人根据第一作业轨迹控制可调节清扫范围的清扫部件对所述镜面对象进行清扫;其中,所述第一作业轨迹位于所述镜面对象的侧面,且使得所述扫地机器人无法从所述镜面对象中拍摄到自身的虚像。
6.根据权利要求5所述的一种扫地机器人的控制方法,其特征在于:当执行所述第二清扫方案时,所述控制扫地机器人执行所述清扫方案,包括:所述扫地机器人将拍摄图像中的镜面区域模糊化处理,并根据第二作业轨迹控制清扫部件对所述镜面对象进行清扫;其中,所述第二作业轨迹位于所述镜面对象的正面。
7.根据权利要求1、2、4-6任一项所述的一种扫地机器人的控制方法,其特征在于:所述扫地机器人为地面式扫地机器人或飞行式扫地机器人。
8.一种扫地机器人的控制系统,包括处理模块、存储模块、获取模块,所述处理模块与所述存储模块、所述获取模块连接;其中,所述存储模块,用于存储可执行的计算机程序代码;所述获取模块,用于获取待清扫区域的图像数据,并传输给所述处理模块;其特征在于:所述处理模块,用于通过调用所述存储模块中的所述可执行的计算机程序代码,执行如权利要求1-7任一项所述的方法。
9.一种电子设备,包括:存储有可执行程序代码的存储器;与所述存储器耦合的处理器;其特征在于:所述处理器调用所述存储器中存储的所述可执行程序代码,执行如权利要求1-7任一项所述的方法。
10.一种计算机存储介质,该存储介质上存储有计算机程序,其特征在于:该计算机程序被处理器运行时执行如权利要求1-7任一项所述的方法。
技术总结
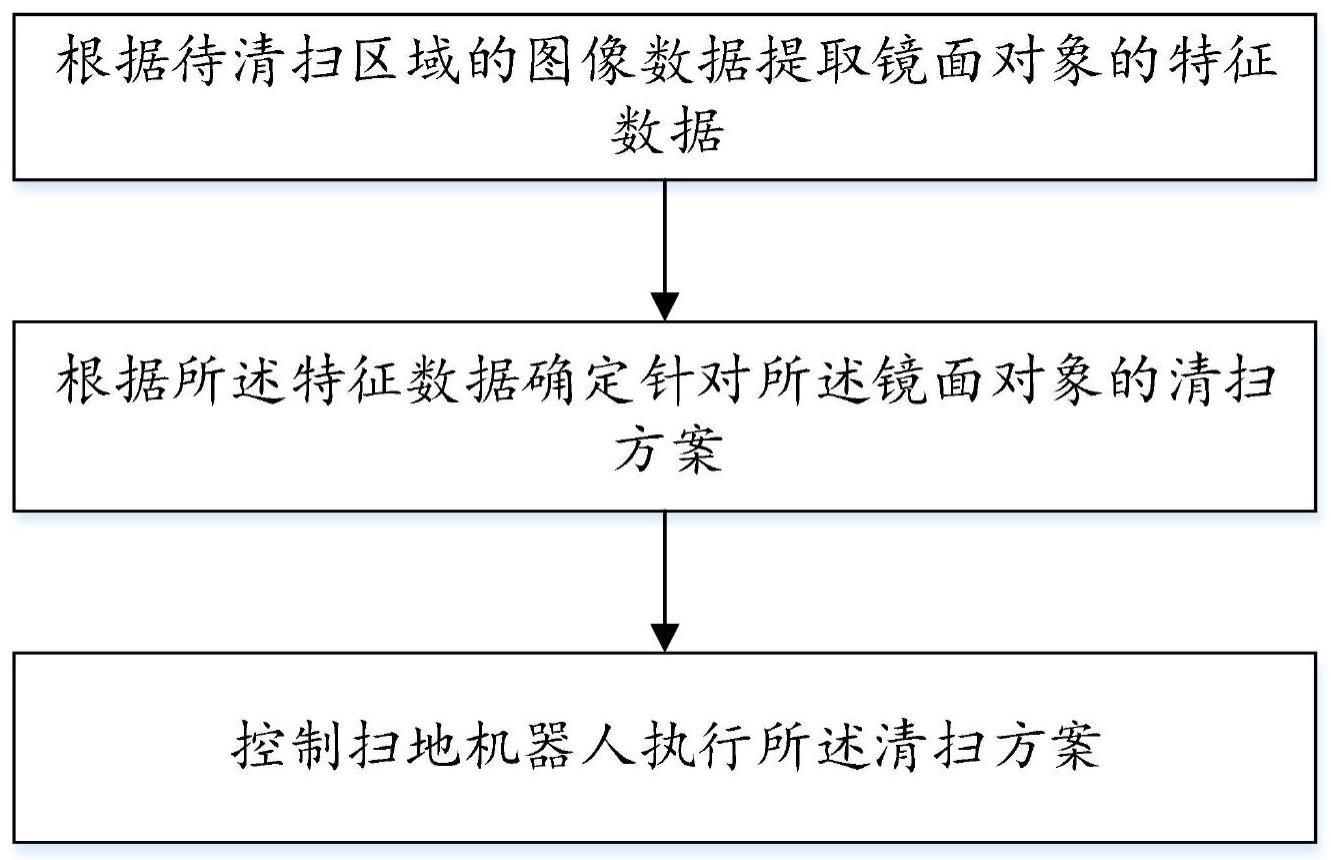
本发明提供了一种扫地机器人的控制方法及系统;其中,所述方法包括:根据待清扫区域的图像数据提取镜面对象的特征数据;根据所述特征数据确定针对所述镜面对象的清扫方案;控制扫地机器人执行所述清扫方案;其中,所述清扫方案用于使所述扫地机器人无法从所述镜面对象中拍摄到自身的虚像;本发明的方案能够使扫地机器人在对镜面设备执行清扫作业时不拍摄到自身在镜面中的虚像,进而也就不会针对虚像而实施避障措施,也就达到了高稳定性姿态控制的技术效果。
技术研发人员:刘远康
受保护的技术使用者:杭州括梭机电设备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!