一种用于煤仓清理的机器人的制作方法
本发明属于清理设备领域,具体涉及一种用于煤仓清理的机器人。
背景技术:
1、地面煤仓作为储存煤炭的中间储存装置,但自然状态下的煤炭细粉极易粘在煤仓内壁,煤炭粉粘在煤仓内壁后摩擦系数迅速增大,煤仓内壁会层层积累,最终导致煤层的板结,减小了煤仓的使用空间,降低了煤仓的生产效率,所以煤仓需要定期清理,煤仓堵塞问题一般采用人工疏通,采用人工疏通不仅效率低下而且危险性较大,面对小量堆积煤灰时无法做到精准清理,目前的清扫设备多为大型器械,每次清扫都需要耗费大量的经济还经常面临拆装困难的问题,因此如何提供一种能够精准清理且拆装方便的煤仓清理设备是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种用于煤仓清理的机器人,能够实现煤仓的精准清理,拆装方便,提高了经济性。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种用于煤仓清理的机器人,包括:
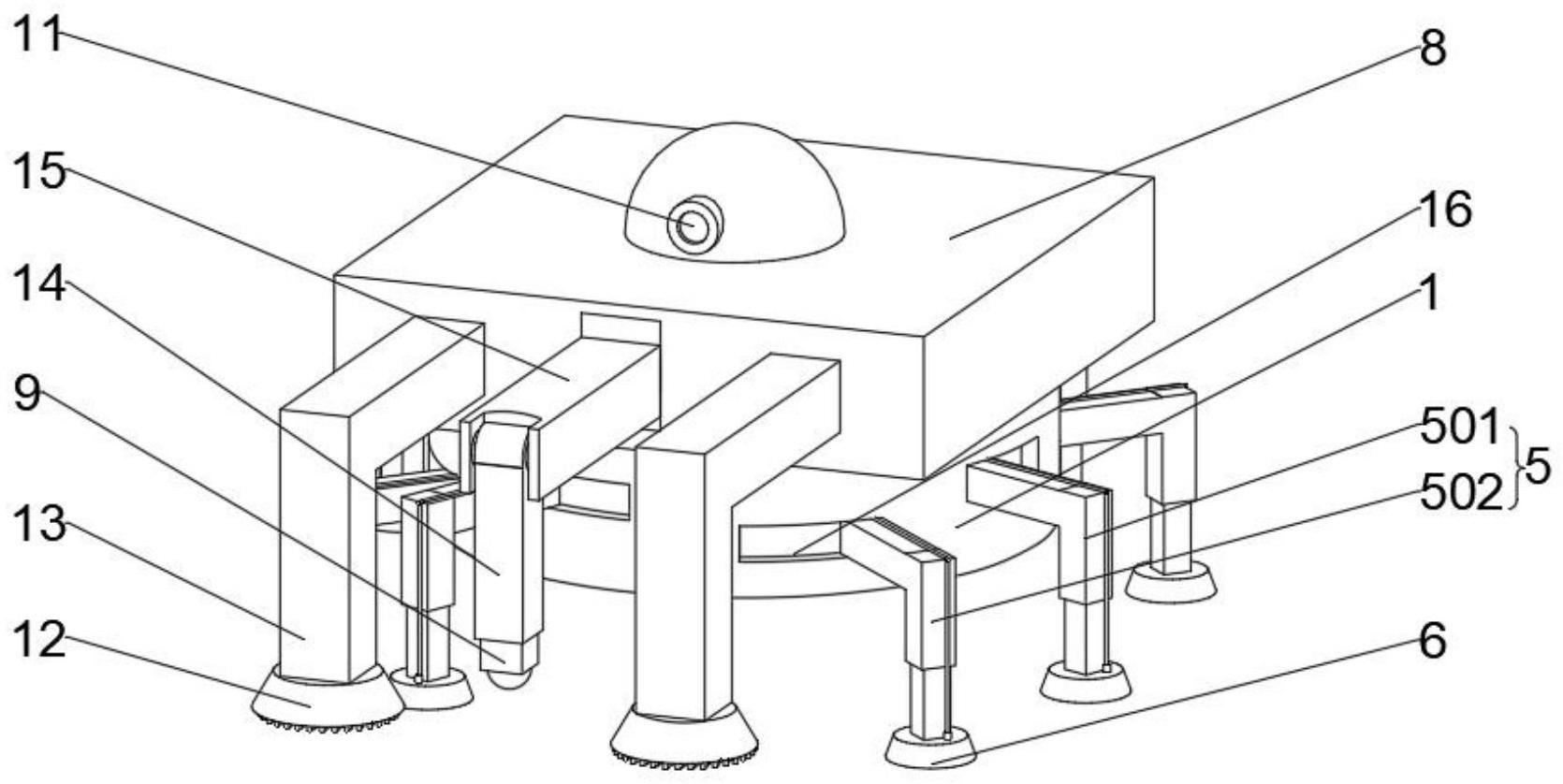
4、底壳,所述底壳内设置有上底盘和下底盘,所述上底盘和所述底壳固定连接,所述上底盘的底端设置有滑轨,所述滑轨的一端设置直线驱动装置,所述下底盘内设置有旋转驱动装置;
5、主轴转杆,所述主轴转杆的一端和所述旋转驱动装置连接,所述主轴转杆的另一端和所述滑轨滑动连接,所述主轴转杆和所述直线驱动装置的输出轴固定连接;
6、支撑腿,所述支撑腿的一端与所述上底盘或所述下底盘连接,所述支撑腿的另一端通过第一伸缩杆与吸附件固定连接,相邻所述支撑腿之间设置有弹性复位件;
7、顶壳,所述顶壳和所述底壳固定连接,所述顶壳通过第一连接杆与清扫件连接。
8、优选的,所述主轴转杆的一端和所述旋转驱动装置通过棘轮机构连接,所述主轴转杆的另一端设置有卡接滑块,所述卡接滑块和所述滑轨滑动连接。
9、优选的,机器人还包括限位孔,所述限位孔设置于所述底壳的侧壁,所述支撑腿的一端穿过所述限位孔并与所述上底盘或所述下底盘连接。
10、优选的,机器人还包括导向连杆,所述上底盘的底端设置有第一导向槽,所述下底盘的顶端设置有与所述第一导向槽平行的第二导向槽,所述导向连杆的一端和所述第一导向槽滑动连接,所述导向连杆的另一端和所述第二导向槽滑动连接。
11、优选的,机器人还包括图像收集器,所述图像收集器设置于所述顶壳上。
12、优选的,所述第一连接杆包括第一旋转杆和第二旋转杆,所述第一旋转杆的一端和所述顶壳转动连接,所述第一旋转杆的另一端和所述第二旋转杆转动连接,所述第二旋转杆和所述清扫件固定连接。
13、优选的,机器人还包括软毛转盘和第二连接杆,所述第二连接杆的一端和所述顶壳连接,所述第二连接杆的另一端和所述软毛转盘连接。
14、优选的,所述支撑腿设置有多个,所述支撑腿包括第一支腿和第二支腿,多个所述第一支腿沿所述上底盘周向均匀分布,多个所述第二支腿沿所述下底盘周向均匀分布,所述第一支腿和所述第二支腿一一对应,相邻的所述第一支腿和所述第二支腿通过所述弹性复位件连接。
15、优选的,所述上底盘内设置有第一驱动件和第一真空泵,所述下底盘内设置有第二驱动件和第二真空泵,所述第一支腿连接的所述第一伸缩杆均与所述第一驱动件连接,所述第一支腿连接的所述吸附件均与所述第一真空泵连接,所述第二支腿连接的所述第一伸缩杆均与所述第二驱动件连接,所述第二支腿连接的所述吸附件均与所述第二真空泵连接。
16、本发明的有益效果在于:
17、本发明与下底盘连接的支撑腿和煤仓壁贴合,或者与上底盘连接的支撑腿和煤仓壁贴合,通过直线驱动装置推动主轴转杆沿滑轨滑动,进而使得上底盘和下底盘产生相对位移完成直线运动,当与下底盘连接的支撑腿和煤仓壁贴合且与上底盘连接的支撑腿和煤仓壁分离时,通过旋转驱动装置带动主轴转杆转动,主轴转杆将旋转力作用于上底盘完成上底盘旋转,当与上底盘连接的支撑腿和煤仓壁贴合且与下底盘连接的支撑腿和煤仓壁分离时,弹性复位件带动支撑腿及其相连的下底盘复位完成下底盘旋转,以此完成煤仓壁内任意位置的移动,进而实现精确定位,当到达待清理位置后,清扫件启动完成清理,待机器人到达煤仓底部后,通过脱离全部吸附件即可实现机器人的拆卸,使得拆装更加的安全方便。本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显。
技术特征:
1.一种用于煤仓清理的机器人,其特征在于,包括:
2.根据权利要求1所述的一种用于煤仓清理的机器人,其特征在于,所述主轴转杆的一端和所述旋转驱动装置通过棘轮机构连接,所述主轴转杆的另一端设置有卡接滑块,所述卡接滑块和所述滑轨滑动连接。
3.根据权利要求1所述的一种用于煤仓清理的机器人,其特征在于,还包括限位孔,所述限位孔设置于所述底壳的侧壁,所述支撑腿的一端穿过所述限位孔并与所述上底盘或所述下底盘连接。
4.根据权利要求1所述的一种用于煤仓清理的机器人,其特征在于,还包括导向连杆,所述上底盘的底端设置有第一导向槽,所述下底盘的顶端设置有与所述第一导向槽平行的第二导向槽,所述导向连杆的一端和所述第一导向槽滑动连接,所述导向连杆的另一端和所述第二导向槽滑动连接。
5.根据权利要求1所述的一种用于煤仓清理的机器人,其特征在于,还包括图像收集器,所述图像收集器设置于所述顶壳上。
6.根据权利要求1所述的一种用于煤仓清理的机器人,其特征在于,所述第一连接杆包括第一旋转杆和第二旋转杆,所述第一旋转杆的一端和所述顶壳转动连接,所述第一旋转杆的另一端和所述第二旋转杆转动连接,所述第二旋转杆和所述清扫件固定连接。
7.根据权利要求1所述的一种用于煤仓清理的机器人,其特征在于,还包括软毛转盘和第二连接杆,所述第二连接杆的一端和所述顶壳连接,所述第二连接杆的另一端和所述软毛转盘连接。
8.根据权利要求1所述的一种用于煤仓清理的机器人,其特征在于,所述支撑腿设置有多个,所述支撑腿包括第一支腿和第二支腿,多个所述第一支腿沿所述上底盘周向均匀分布,多个所述第二支腿沿所述下底盘周向均匀分布,所述第一支腿和所述第二支腿一一对应,相邻的所述第一支腿和所述第二支腿通过所述弹性复位件连接。
9.根据权利要求8所述的一种用于煤仓清理的机器人,其特征在于,所述上底盘内设置有第一驱动件和第一真空泵,所述下底盘内设置有第二驱动件和第二真空泵,所述第一支腿连接的所述第一伸缩杆均与所述第一驱动件连接,所述第一支腿连接的所述吸附件均与所述第一真空泵连接,所述第二支腿连接的所述第一伸缩杆均与所述第二驱动件连接,所述第二支腿连接的所述吸附件均与所述第二真空泵连接。
技术总结
本发明公开了一种用于煤仓清理的机器人,属于清理设备领域,包括:底壳内设置有上底盘和下底盘,上底盘和底壳固定连接,上底盘的底端设置有滑轨,滑轨的一端设置直线驱动装置,下底盘内设置有旋转驱动装置;主轴转杆的一端和旋转驱动装置连接,主轴转杆的另一端和滑轨滑动连接,主轴转杆和直线驱动装置的输出轴固定连接;支撑腿的一端与上底盘或下底盘连接,支撑腿的另一端通过第一伸缩杆与吸附件固定连接,相邻支撑腿之间设置有弹性复位件;顶壳和底壳固定连接,顶壳通过第一连接杆与清扫件连接。本发明能够通过上底盘和下底盘配合使机器人移动至指定位置并完成清理工作,拆卸更加方便,经济性更好。
技术研发人员:陈龙,孙白华,徐丽华,杨军
受保护的技术使用者:宁夏创际智慧科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!