一种用于配合洗碗机器人的餐具拾放结构以及洗碗机器人的制作方法
本发明涉及厨房设备,尤其涉及一种用于配合洗碗机器人的餐具拾放结构以及洗碗机器人。
背景技术:
1、洗碗机是自动清洗碗、筷、盘、碟、刀、叉等餐具的设备,随着洗碗机的逐年升级换代, 市面上随之出现了各种不同结构和功能的洗碗机。尤其为了能实现更加充分地清洁洗碗机内的餐具,目前在业内出现了一些针对洗碗机的改良方案,例如在洗碗机内增加设置机械臂,以模仿人手的动作对餐具进行精细化的清洗,有利于更加彻底地去除残留在餐具表面的顽固污垢,完成对餐具的清洗后,还需要把已经完成清洗的餐具搬运至餐具存放区域,搬运餐具的机构主要依靠设置在机械臂前端的夹体,但是夹体对餐具施加的夹持力容易对餐具表面造成磨损,因此仍然存在明显的技术缺陷。因此亟需一种既能配合机械臂执行餐具搬运的工作,又能减少对餐具表面造成磨损的餐具搬运配件。
技术实现思路
1、为了解决现有技术存在的技术问题,本发明提供一种用于配合洗碗机器人的餐具拾放结构以及洗碗机器人,不但能有助于配合机械臂执行餐具搬运的工作,又能有利于减少对餐具表面造成的磨损。
2、本发明提供一种用于配合洗碗机器人的餐具拾放结构,包括吸附器,所述吸附器的前侧用于吸附餐具,所述吸附器的后侧设置有机械臂对接座, 所述机械臂对接座用于可拆卸地对外连接于机械臂, 所述机械臂对接座上设置有电性连接于所述吸附器的导电接头。
3、根据本发明一种用于配合洗碗机器人的餐具拾放结构,所述吸附器包括电磁铁,所述电磁铁设置在吸附器的前侧并用于吸附餐具,所述电磁铁的接电端电性连接于所述导电接头。
4、根据本发明一种用于配合洗碗机器人的餐具拾放结构,所述吸附器还包括真空吸筒和抽气接入管,所述真空吸筒的前端吸附口位于所述吸附器的前侧,所述抽气接入管的前端接通所述真空吸筒,所述抽气接入管的后端设置有抽气对接头,所述抽气对接头设置在所述机械臂对接座上。
5、根据本发明一种用于配合洗碗机器人的餐具拾放结构,所述吸附器还包括喷气筒和喷气接入管,所述喷气筒同轴套接在所述真空吸筒的内部,所述喷气筒的前端喷气口位于所述吸附器的前侧,所述喷气接入管的后端设置有喷气对接头,所述喷气对接头设置在所述机械臂对接座上。
6、根据本发明一种用于配合洗碗机器人的餐具拾放结构,所述真空吸筒和所述喷气筒的数量分别为多个,各个所述喷气筒分别同轴套接在各个所述真空吸筒的内部。
7、根据本发明一种用于配合洗碗机器人的餐具拾放结构,所述吸附器内设置有导轨,所述导轨内固定套接有直线位移传感器以及弹性套接有磁铁,所述直线位移传感器的活动触头连接于所述磁铁,所述磁铁,所述直线位移传感器的信号输出端电性连接于所述导电接头,所述磁铁抵近于所述吸附器的前侧以用于感应金属餐具。
8、根据本发明一种用于配合洗碗机器人的餐具拾放结构,所述导轨的前端固定套接有封板,所述封板的背面设置有弹簧,所述弹簧弹性连接在所述封板与所述磁铁之间。
9、根据本发明一种用于配合洗碗机器人的餐具拾放结构,所述吸附器的前侧设置有环形硅胶垫,所述环形硅胶垫环绕在所述真空吸筒的前端吸附口外周。
10、根据本发明一种用于配合洗碗机器人的餐具拾放结构,所述机械臂对接座包括相互垂直固定的基板和折弯板,所述吸附器设置在所述基板的前侧,所述基板的后侧设置有对接杆,所述折弯板上活动套接有弹性磁铁杆,所述对接杆与弹性磁铁杆相互垂直;所述对接杆用于从机械臂的端部平行对接于机械臂,所述弹性磁铁杆用于从机械臂的侧面垂直插接于机械臂。
11、本发明还公开一种洗碗机器人,其结构包括如上所述的用于配合洗碗机器人的餐具拾放结构。
12、本发明一种用于配合洗碗机器人的餐具拾放结构,包括吸附器,通过吸附器的前侧接触餐具并吸附餐具,同时吸附器能通过后侧的机械臂对接座可拆卸地对外连接于机械臂,故可以便于所述吸附器安装在机械臂上并受机械臂操控带动,因此洗碗机内的机械臂可以通过所述吸附器拾起餐具,实现对餐具的搬运,此外,由于所述机械臂对接座上还设置有电性连接于所述吸附器的导电接头,因此可以有助于实现机械臂对接所述机械臂对接座的同时,让集成在机械臂上的供电电路对接于所述导电接头,便于让吸附器通电运作,便于机械臂内部的控制单元通过对电路的控制实现操控所述吸附器的启动与停止,从而便可以实现既能拾取餐具,也能释放餐具的效果。可以理解,本发明通过在洗碗机内的机械臂上设置能吸附餐具的吸附器,让机械臂以吸附的方式拾取并搬运餐具,吸附的方式明显能减少对餐具表面的摩擦,能减少对餐具表面造成的磨损。因此本发明一种用于配合洗碗机器人的餐具拾放结构以及洗碗机器人不但能有助于配合机械臂执行餐具搬运的工作,又能有利于减少对餐具表面造成的磨损。
技术特征:
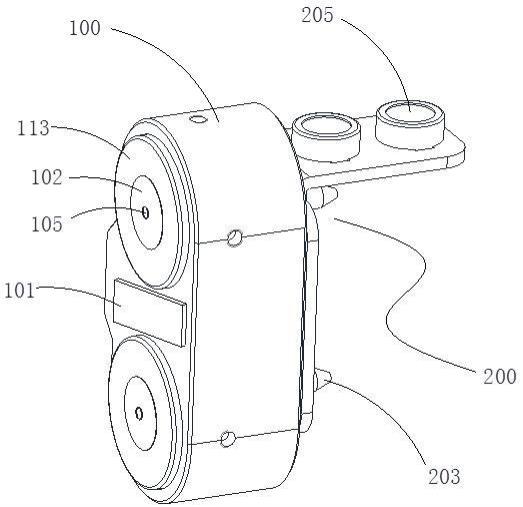
1.一种用于配合洗碗机器人的餐具拾放结构,其特征在于,包括吸附器(100),所述吸附器(100)的前侧用于吸附餐具,所述吸附器(100)的后侧设置有机械臂对接座(200), 所述机械臂对接座(200)用于可拆卸地对外连接于机械臂, 所述机械臂对接座(200)上设置有电性连接于所述吸附器(100)的导电接头(300)。
2.根据权利要求1所述的用于配合洗碗机器人的餐具拾放结构,其特征在于,所述吸附器(100)包括电磁铁(101),所述电磁铁(101)设置在吸附器(100)的前侧并用于吸附餐具,所述电磁铁(101)的接电端电性连接于所述导电接头(300)。
3.根据权利要求1所述的用于配合洗碗机器人的餐具拾放结构,其特征在于,所述吸附器(100)还包括真空吸筒(102)和抽气接入管(103),所述真空吸筒(102)的前端吸附口位于所述吸附器(100)的前侧,所述抽气接入管(103)的前端接通所述真空吸筒(102),所述抽气接入管(103)的后端设置有抽气对接头(104),所述抽气对接头(104)设置在所述机械臂对接座(200)上。
4.根据权利要求3所述的用于配合洗碗机器人的餐具拾放结构,其特征在于,所述吸附器(100)还包括喷气筒(105)和喷气接入管(106),所述喷气筒(105)同轴套接在所述真空吸筒(102)的内部,所述喷气筒(105)的前端喷气口位于所述吸附器(100)的前侧,所述喷气接入管(106)的后端设置有喷气对接头(107),所述喷气对接头(107)设置在所述机械臂对接座(200)上。
5.根据权利要求4所述的用于配合洗碗机器人的餐具拾放结构,其特征在于,所述真空吸筒(102)和所述喷气筒(105)的数量分别为多个,各个所述喷气筒(105)分别同轴套接在各个所述真空吸筒(102)的内部。
6.根据权利要求1所述的用于配合洗碗机器人的餐具拾放结构,其特征在于,所述吸附器(100)内设置有导轨(108),所述导轨(108)内固定套接有直线位移传感器(109)以及弹性套接有磁铁(110),所述直线位移传感器(109)的活动触头连接于所述磁铁(110),所述磁铁(110),所述直线位移传感器(106)的信号输出端电性连接于所述导电接头(300),所述磁铁(110)抵近于所述吸附器(100)的前侧以用于感应金属餐具。
7.根据权利要求6所述的用于配合洗碗机器人的餐具拾放结构,其特征在于,所述导轨(108)的前端固定套接有封板(111),所述封板(111)的背面设置有弹簧(112),所述弹簧(112)弹性连接在所述封板(111)与所述磁铁(110)之间。
8.根据权利要求3所述的用于配合洗碗机器人的餐具拾放结构,其特征在于,所述吸附器(100)的前侧设置有环形硅胶垫(113),所述环形硅胶垫(113)环绕在所述真空吸筒(102)的前端吸附口外周。
9.根据权利要求1所述的用于配合洗碗机器人的餐具拾放结构,其特征在于,所述机械臂对接座(200)包括相互垂直固定的基板(201)和折弯板(202),所述吸附器(100)设置在所述基板(201)的前侧,所述基板(201)的后侧设置有多个对接杆(203),所述折弯板(202)上活动套接有多个弹性磁铁杆(204),所述对接杆(203)与弹性磁铁杆(204)相互垂直;所述对接杆(11)用于从机械臂的端部平行对接于机械臂,所述弹性磁铁杆(12)用于从机械臂的侧面垂直插接于机械臂。
10.一种洗碗机器人,其特征在于,包括如权利要求1至9任一项所述的用于配合洗碗机器人的餐具拾放结构。
技术总结
本发明涉及厨房设备技术领域,尤其涉及一种用于配合洗碗机器人的餐具拾放结构以及洗碗机器人,包括吸附器,所述吸附器的前侧用于吸附餐具,所述吸附器的后侧设置有机械臂对接座,所述机械臂对接座用于可拆卸地对外连接于机械臂,所述机械臂对接座上设置有电性连接于所述吸附器的导电接头。本发明一种用于配合洗碗机器人的餐具拾放结构以及洗碗机器人不但能配合机械臂执行餐具搬运的工作,又能有利于减少对餐具表面造成的磨损。
技术研发人员:何锋
受保护的技术使用者:广州煌牌自动设备有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!