脏污检测装置、方法及机器人与流程
本发明涉及人工智能领域,具体而言,涉及一种脏污检测装置、方法及机器人。
背景技术:
1、在酒店、超市、商场、工厂、医院等环境场所,机器人凭借其高效、准确、连续的工作能力,逐渐替代人工执行清洁任务,上述工作场景环境复杂、多变,机器人执行清洁任务更多的是采用全局遍历,无法根据地面脏污情况进行检测,并针对性清洁,影响机器人执行任务的效果及智能化程度。
2、目前市面上机器人为实现清洁任务,采用全场景遍历式清洁方式,即控制机器人在目标工作场景中无差别地进行全场景遍历,实现工作场景清洁。
3、在机器人工作场景中,脏污检测有三种:1)人工检测;2)辅助人工检测;3)红外刷盘检测;人工检测需要消耗人力,且对脏污检测因为光线环境影响比较大,不易准确检测;辅助人工检测是在机器上增加补光(如绿光打到地面,增加灰尘的显尘效果),该方式可以提升人工检测的成功率,但是仍然需要人工;红外刷盘检测方式是在机器人的刷盘上增加红外检测设备,如果地面脏污,则刷盘上就会更脏,则红外传感器打到刷盘上的反射就会发生变化,进而实现脏污检测,该种检测方式检测率较低,尤其对于脏污程度偏低的场景或清水等浅色脏污没有识别能力,同时是机器人运行到脏污区域或者机器人已经经过脏污区域才能检测出来,没有脏污提前检测能力,无法在脏污区域前实现脏污的检测,进而针对性进行对于的策略性清洁。
4、因此,如何实现机器人对脏污的自动化、智能化检测,并在机器人运行至脏污区域前提前进行脏污检测,是目前亟待解决的问题。
技术实现思路
1、本发明的主要目的在于公开了一种脏污检测装置、方法及机器人,以至少解决相关技术中无法实现机器人对脏污的自动化、智能化检测,并在机器人运行至脏污区域前提前进行脏污检测等问题。
2、根据本发明的一个方面,提供了一种脏污检测装置。
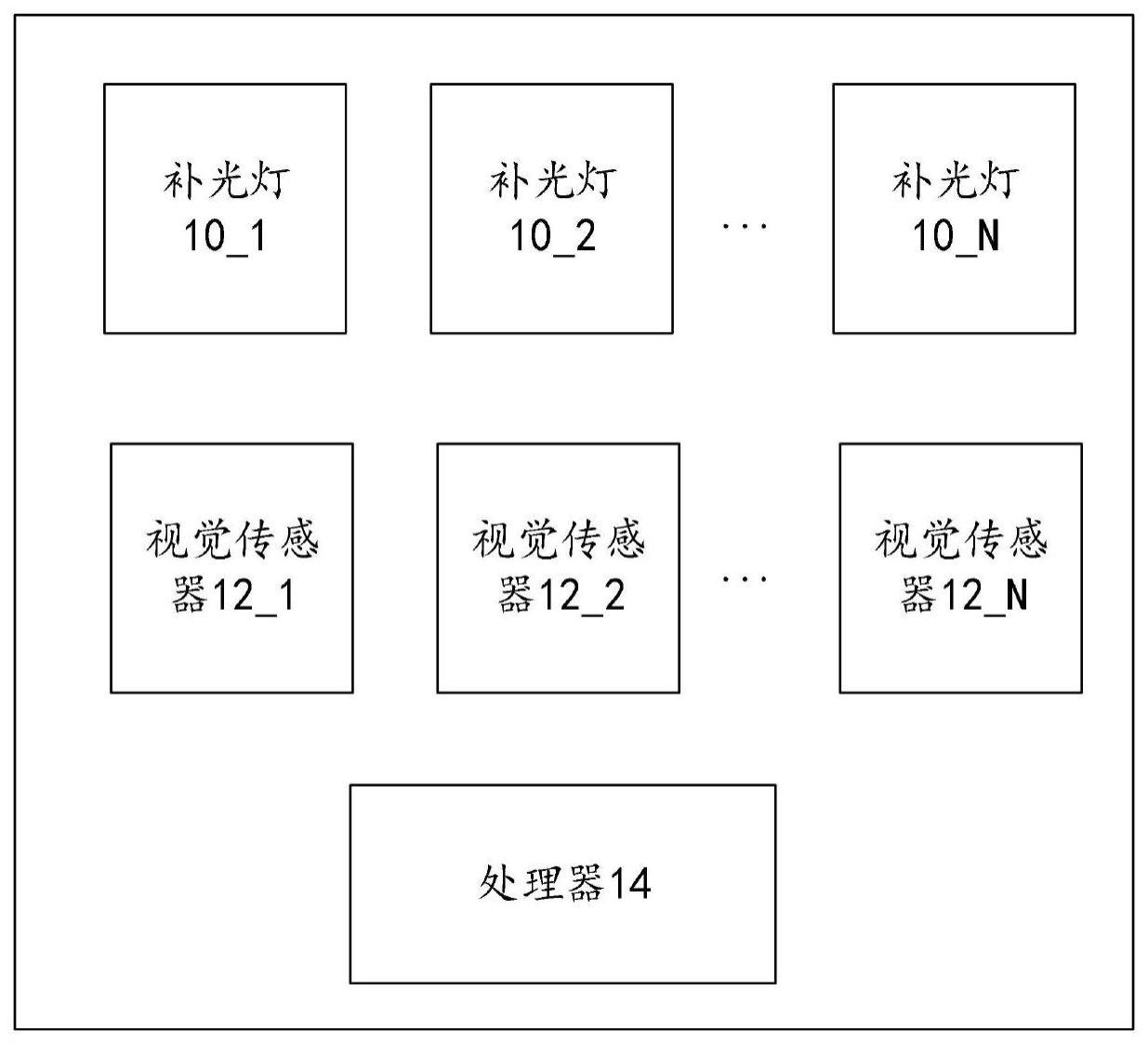
3、根据本发明的脏污检测装置包括:一个或多个视觉传感器,按照第一预定角度的俯仰角向地面倾斜设置,用于在机器人行进过程中采集地面信息,获取多幅图像,一个或多个补光灯,按照第二预定角度的俯仰角向地面倾斜设置,用于向地面发射光线并调节光线的强度;处理模块,用于提取上述多幅图像的特征信息,将各幅图像对应的上述特征信息进行结合和/或比较,对地面脏污状况进行检测。
4、根据本发明的另一方面,提供了一种脏污检测方法。
5、根据本发明的脏污检测方法包括:在机器人行进过程中,按照第一预定角度的俯仰角向地面倾斜设置的一个或多个视觉传感器,采集地面信息获取多幅图像,以及按照第二预定角度的俯仰角向地面倾斜设置的一个或多个补光灯,向地面发射光线并调节光线的强度;处理模块提取上述多幅图像的特征信息,将各幅图像对应的上述特征信息进行结合和/或比较,对地面脏污状况进行检测。
6、根据本发明的又一方面,提供了一种机器人。
7、根据本发明的机器人包括:上述任一项所述的脏污检测装置。用于实现所述机器人同时定位与建图slam的单目或多目视觉模组;以及,处理器,用于根据所述脏污检测装置的脏污检测结果以及机器人位姿数据,创建脏污场景地图。
8、根据本发明,提供的脏污检测装置,可以设置于机器人本体上,从而实现机器人对脏污的自动化、智能化检测,并在机器人运行至脏污区域前提前进行脏污检测,提升了机器人智能化水平及工作效率。
技术特征:
1.一种脏污检测装置,其特征在于,包括:
2.根据权利要求1所述的装置,其特征在于,还包括:感光装置,用于感应当前环境光的亮度。
3.根据权利要求1或2所述的装置,其特征在于,所述一个或多个视觉传感器包括:一个高清摄像头,用于采集地面信息,获取各帧对应的图像;
4.根据权利要求1或2所述的装置,其特征在于,所述一个或多个视觉传感器包括:间隔预定距离设置的多个高清摄像头,其中,所述多个高清摄像头中的至少一个高清摄像头,周边邻近设置有至少一个补光灯;
5.根据权利要求1或2所述的装置,其特征在于,所述一个或多个视觉传感器包括:用于获取图像纹理特征信息的一个或多个高清摄像头、以及用于获取光谱特征信息的一个或多个光谱相机;
6.根据权利要求1或2所述的装置,其特征在于,所述一个或多个补光灯,用于通过以下至少之一的方式调节光线的强度:
7.一种根据权利要求1至6中任一项所述的脏污检测装置的脏污检测方法,其特征在于,包括:
8.根据权利要求7所述的方法,其特征在于,所述一个或多个视觉传感器包括:一个高清摄像头,则按照第一预定角度的俯仰角向地面倾斜设置的一个或多个视觉传感器,采集地面信息获取多幅图像,以及按照第二预定角度的俯仰角向地面倾斜设置的一个或多个补光灯,向地面发射光线并调节光线的强度包括:
9.根据权利要求7所述的方法,其特征在于,所述一个或多个视觉传感器包括:按照预定距离间隔设置的多个高清摄像头,则按照第一预定角度的俯仰角向地面倾斜设置的一个或多个视觉传感器,采集地面信息获取多幅图像,以及按照第二预定角度的俯仰角向地面倾斜设置的一个或多个补光灯,向地面发射光线并调节光线的强度包括:
10.根据权利要求8或9所述的方法,其特征在于,将所述共视区域的图像特征信息进行比较,根据比较结果对地面脏污状况进行检测包括:
11.根据权利要求10所述的方法,其特征在于,对于所述共视区域的图像,分别获取第一散点特征图和第二散点特征图包括:
12.根据权利要求7所述的方法,其特征在于,所述一个或多个视觉传感器包括:用于获取图像纹理特征信息的一个或多个高清摄像头、以及用于获取光谱特征信息的一个或多个光谱相机,则按照第一预定角度的俯仰角向地面倾斜设置的一个或多个视觉传感器,采集地面信息获取多幅图像,以及按照第二预定角度的俯仰角向地面倾斜设置的一个或多个补光灯,向地面发射光线并调节光线的强度包括:
13.根据权利要求7或8或9或12所述的方法,其特征在于,在所述一个或多个视觉传感器,采集地面信息获取多幅图像之后,还包括:
14.一种机器人,其特征在于,包括:
15.根据权利要求14所述的机器人,其特征在于,所述一个或多个脏污检测装置设置于机器人本体的前方位置和/或后方位置。
16.根据权利要求14或15所述的机器人,其特征在于,所述机器人本体的前方位置和后方位置均设置有所述脏污检测装置;其中,
技术总结
本发明公开了一种脏污检测装置、方法及机器人,上述装置包括:一个或多个视觉传感器,按照第一预定角度的俯仰角向地面倾斜设置,用于在机器人行进过程中采集地面信息,获取多幅图像,一个或多个补光灯,按照第二预定角度的俯仰角向地面倾斜设置,用于向地面发射光线并调节光线的强度;处理模块,用于提取所述多幅图像的特征信息,将各幅图像对应的所述特征信息进行结合和/或比较,对地面脏污状况进行检测。采用上述方案,可以实现机器人对脏污的自动化、智能化检测,并在机器人运行至脏污区域前提前进行脏污检测,提升了机器人智能化水平及工作效率。
技术研发人员:闫东坤,田伟,仇丽茹,方万元
受保护的技术使用者:北京盈迪曼德科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!