一种墙面清扫用无人机的制作方法
本发明涉及无人机,具体为一种墙面清扫用无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机;民用方面,无人机+行业应用,是无人机真正的刚需。
2、目前对于大厦外玻璃幕墙的清洁还停留在人工清洁的水平,清洁时,工人需要借助吊机设备才能对幕墙玻璃进行清洗,如此人工成本较大,且清洁时间长,效率低。随着科技技术的发展民用无人机在日常生活中越来越常见,如果能够利用无人机辅助对于立面的玻璃幕墙进行清洁,则能够大大减小大厦玻璃幕墙的清洁成本,且能提高清洁效率。为此,我们提出一种墙面清扫用无人机。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种墙面清扫用无人机,具备能够对玻璃幕墙进行贴面清洁,提高玻璃幕墙的清洁效率,且减小清洁成本,并且具备跨模态运动方式等优点,解决了目前大厦玻璃幕墙清洁困难,效率低成本高的问题。
3、(二)技术方案
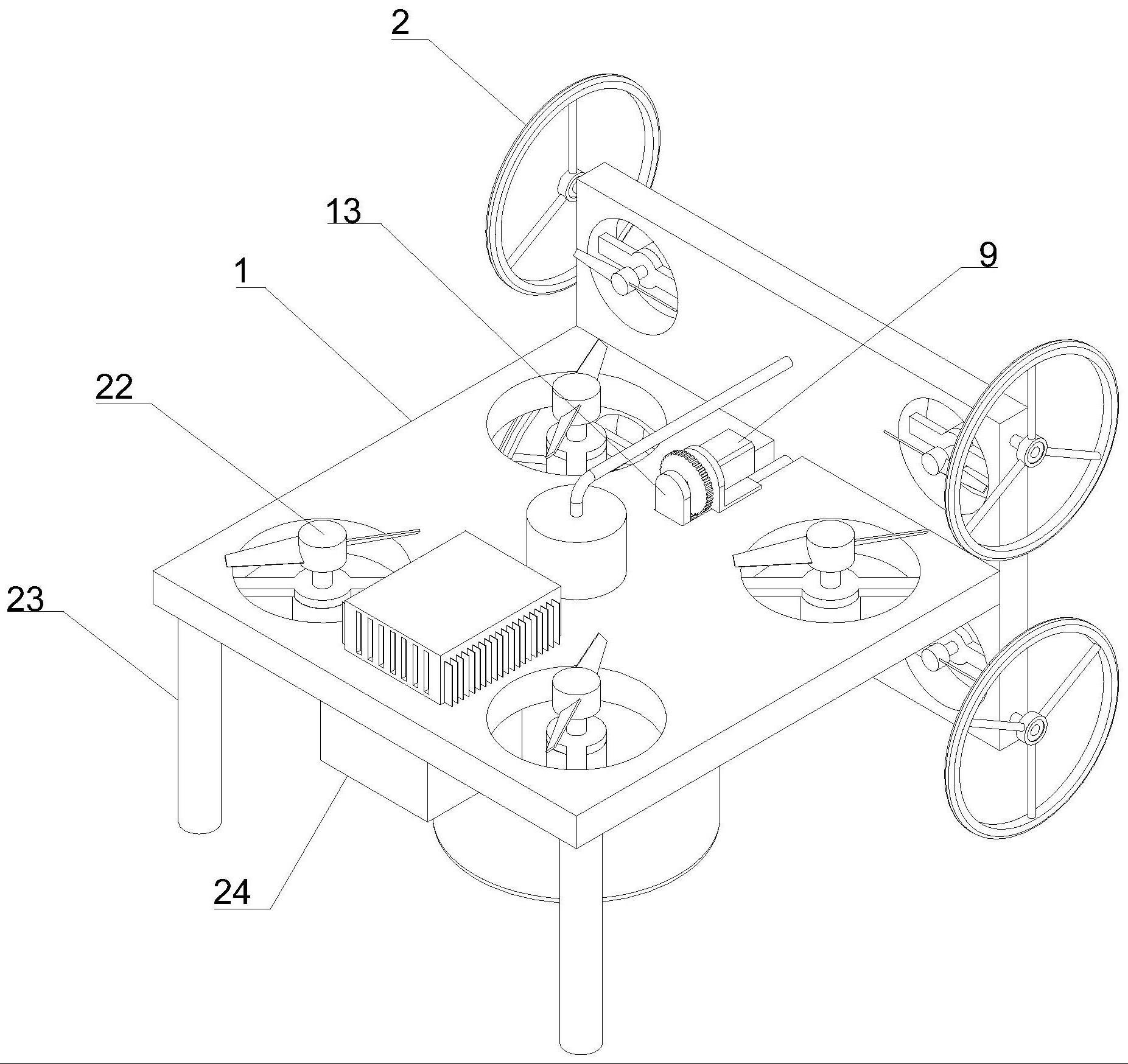
4、为实现上述能够对玻璃幕墙进行贴面清洁,提高玻璃幕墙的清洁效率,且减小清洁成本,并且具备跨模态运动方式的目的,本发明提供如下技术方案:一种墙面清扫用无人机,包括跨模态t型无人机平台,所述跨模态t型无人机平台的两端转动连接转轴,所述转轴的一端安装移动轮,所述跨模态t型无人机平台的上表面贯穿开设滑槽,所述滑槽内滑动设置一号轴套,所述一号轴套内转动连接清扫杆,所述清扫杆的外表面固定连接小齿轮,所述一号轴套的上表面固定连接电机基座,所述电机基座的外表安装伺服电机,所述伺服电机输出端的外表面固定连接大齿轮,所述清扫杆的一端套接二号轴套,所述二号轴套的一侧固定连接调节板,所述调节板的外表面固定连接三号轴套和电动推杆,所述跨模态t型无人机平台的上表面安装增压泵,所述增压泵的输出端固定连接输送管,所述输送管的一端安装雾化喷头,所述所述跨模态t型无人机平台的下表面固定连接套管,所述套管内连接蓄水桶,所述清扫杆远离所述二号轴套的一端固定连接安装板,所述安装板一侧卡接胶条。
5、优选的,所述跨模态t型无人机平台的上表面安装四组旋翼,且所述跨模态t型无人机平台的侧面也安装四组旋翼。
6、通过以上技术方案,跨模态t型无人机平台的机体结构整体呈横置的“t”字造型,各组旋翼均有单独的无刷电机带动,水平方向的四组旋翼呈现四轴八桨布局,提供整个无人机的垂起起降、悬停、左右移动等基本模态飞行,而跨模态t型无人机平台立面的四组旋翼则可提供整个无人机在悬停状态下的前后平移。
7、优选的,所述转轴远离所述跨模态t型无人机平台的一端转动连接有移动轮,所述移动轮设置有四组。
8、通过以上技术方案,当该无人机起飞靠近玻璃幕墙外表面后,通过跨模态t型无人机平台立面的四组旋翼使得平移无人机,且使得四个移动轮与待清扫的幕墙面贴近,并移动轮配合转轴可进行上下移动,形成紧贴墙面的轮式模态运动,方便移动无人机的位置而更换待清扫的墙面位置。
9、优选的,所述电动推杆的推杆端固定连接调节板,且所述电动推杆安装于所述跨模态t型无人机平台的内侧面。
10、通过以上技术方案,当移动轮贴合幕墙墙面后,通过启动电动推杆使其推杆收缩而带动调节板,调节板带动二号轴套和三号轴套,进而能够带动伺服电机、电机基座、清扫杆和一号轴套移动,清扫杆带动安装板,安装板带动胶条贴合到墙面上,后续胶条可对幕墙墙面进行清洁。
11、优选的,所述大齿轮啮合连接小齿轮,所述伺服电机的输出端套接于所述三号轴套内,所述跨模态t型无人机平台的侧面贯穿开设通孔,所述通孔内穿插所述清扫杆。
12、通过以上技术方案,通过启动伺服电机后带动大齿轮转动,大齿轮带动小齿轮转动,小齿轮带动清扫杆转动,清扫杆外表面设置的一号轴套内设置有轴承,如此清扫杆可轻便的转动而带动安装板和胶条转动,胶条转动期间对幕墙表面进行清洁。
13、优选的,所述安装板的顶部贯穿开设有t形槽,所述t形槽内卡接所述胶条,所述胶条的外表面螺纹连接旋钮。
14、通过以上技术方案,通过逆时针转动旋钮使其螺杆在胶条内反向进给,然后可从安装板的t形槽内抽出胶条,方便更换胶条,更换新的胶条后顺时针转动旋钮使其螺杆在胶条内正向进给而抵触安装板的t形槽内壁,如此可防止胶条脱落。
15、优选的,所述增压泵的吸入端固定连接吸水管,所述吸水管设置于所述蓄水桶内,所述蓄水桶与所述套管螺纹连接。
16、通过以上技术方案,胶条在清洁墙面前,通过启动增压泵使其配合吸水管吸取蓄水桶内的清洁液,然后清洁液进入到输送管内,最后从雾化喷头喷出而喷洒在墙面上,如此之后胶条开始转动清洁墙面,且随无人机的移动可实现一边喷水,一边清扫墙面,使得大大提高玻璃幕墙的清洁效率,蓄水桶与套管之间采用螺纹连接,方便蓄水桶内添加清洁液后安装在套管上。
17、优选的,所述跨模态t型无人机平台的固定连接有支架和蓄电池,所述跨模态t型无人机平台的上表面安装有控制器。
18、通过以上技术方案,支架用于在不使用无人机时支撑无人机,蓄电池用于提供电能,而控制器内设置有单片机用于电性连接伺服电机、电动推杆、增压泵和各个旋翼,且控制器内设置有遥控接收器,用于匹配无人机地面遥控设备。
19、与现有技术相比,本发明提供了一种墙面清扫用无人机,具备以下有益效果:
20、1、本发明提供的一种墙面清扫用无人机,通过将无人机移动至玻璃幕墙上,然后增压泵配合输送管、蓄水桶、雾化喷头等可将清洁液喷洒在幕墙面上,然后通过电动推杆可移动胶条贴合在幕墙表面,通过伺服电机配合大齿轮和小齿轮驱动清扫杆转动而带动胶条转动对幕墙表面进行清洁,且随无人机的移动可实现一边喷水,一边清扫墙面,使得大大提高玻璃幕墙的清洁效率,且成本小。
21、2、本发明提供的一种墙面清扫用无人机,通过设置四组转轴和移动轮,当该无人机起飞靠近玻璃幕墙外表面后,通过跨模态t型无人机平台立面的四组旋翼使得平移无人机,且使得四个移动轮与待清扫的幕墙面贴近,并移动轮配合转轴可进行上下移动,形成紧贴墙面的轮式模态运动,方便移动无人机的位置而更换待清扫的墙面位置。
22、3、本发明提供的一种墙面清扫用无人机,通过在安装板上开设t形槽用于卡接胶条,通过逆时针转动旋钮使其螺杆在胶条内反向进给,然后可从安装板的t形槽内抽出胶条,方便更换胶条,更换新的胶条后顺时针转动旋钮使其螺杆在胶条内正向进给而抵触安装板的t形槽内壁,如此可防止胶条脱落。
技术特征:
1.一种墙面清扫用无人机,包括跨模态t型无人机平台(1),其特征在于:所述跨模态t型无人机平台(1)的两端转动连接转轴(2),所述转轴(2)的一端安装移动轮(3),所述跨模态t型无人机平台(1)的上表面贯穿开设滑槽(4),所述滑槽(4)内滑动设置一号轴套(5),所述一号轴套(5)内转动连接清扫杆(6),所述清扫杆(6)的外表面固定连接小齿轮(7),所述一号轴套(5)的上表面固定连接电机基座(8),所述电机基座(8)的外表安装伺服电机(9),所述伺服电机(9)输出端的外表面固定连接大齿轮(10),所述清扫杆(6)的一端套接二号轴套(11),所述二号轴套(11)的一侧固定连接调节板(13),所述调节板(13)的外表面固定连接三号轴套(12)和电动推杆(14),所述跨模态t型无人机平台(1)的上表面安装增压泵(15),所述增压泵(15)的输出端固定连接输送管(16),所述输送管(16)的一端安装雾化喷头(17),所述所述跨模态t型无人机平台(1)的下表面固定连接套管(18),所述套管(18)内连接蓄水桶(19),所述清扫杆(6)远离所述二号轴套(11)的一端固定连接安装板(20),所述安装板(20)一侧卡接胶条(21)。
2.根据权利要求1所述的一种墙面清扫用无人机,其特征在于:所述跨模态t型无人机平台(1)的上表面安装四组旋翼(22),且所述跨模态t型无人机平台(1)的侧面也安装四组旋翼(22)。
3.根据权利要求1所述的一种墙面清扫用无人机,其特征在于:所述转轴(2)远离所述跨模态t型无人机平台(1)的一端转动连接有移动轮(3),所述移动轮(3)设置有四组。
4.根据权利要求1所述的一种墙面清扫用无人机,其特征在于:所述电动推杆(14)的推杆端固定连接调节板(13),且所述电动推杆(14)安装于所述跨模态t型无人机平台(1)的内侧面。
5.根据权利要求1所述的一种墙面清扫用无人机,其特征在于:所述大齿轮(10)啮合连接小齿轮(7),所述伺服电机(9)的输出端套接于所述三号轴套(12)内,所述跨模态t型无人机平台(1)的侧面贯穿开设通孔,所述通孔内穿插所述清扫杆(6)。
6.根据权利要求1所述的一种墙面清扫用无人机,其特征在于:所述安装板(20)的顶部贯穿开设有t形槽,所述t形槽内卡接所述胶条(21),所述胶条(21)的外表面螺纹连接旋钮(211)。
7.根据权利要求1所述的一种墙面清扫用无人机,其特征在于:所述增压泵(15)的吸入端固定连接吸水管,所述吸水管设置于所述蓄水桶(19)内,所述蓄水桶(19)与所述套管(18)螺纹连接。
8.根据权利要求1所述的一种墙面清扫用无人机,其特征在于:所述跨模态t型无人机平台(1)的固定连接有支架(23)和蓄电池(24),所述跨模态t型无人机平台(1)的上表面安装有控制器(25)。
技术总结
本发明涉及无人机技术领域,且公开了一种墙面清扫用无人机,包括跨模态T型无人机平台,跨模态T型无人机平台的两端转动连接转轴,转轴的一端安装移动轮,跨模态T型无人机平台的上表面贯穿开设滑槽,滑槽内滑动设置一号轴套,一号轴套内转动连接清扫杆,清扫杆的外表面固定连接小齿轮,一号轴套的上表面固定连接电机基座,电机基座的外表安装伺服电机。本发明通过将无人机移动至玻璃幕墙上,然后增压泵配合输送管、蓄水桶、雾化喷头等可将清洁液喷洒在幕墙面上,然后通过电动推杆可移动胶条贴合在幕墙表面,通过伺服电机配合大齿轮和小齿轮驱动清扫杆转动而带动胶条转动对幕墙表面进行清洁。
技术研发人员:杨俊,梁旭
受保护的技术使用者:合肥德智航创科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!