清洁机器人和清洁系统的制作方法
本发明涉及清洁机器人领域,尤其涉及一种清洁机器人和清洁系统。
背景技术:
1、洗地机器人、扫地机器人、扫拖一体机器人等清洁机器人是一种可以辅助用户进行清洁工作的机器。在相关技术中,为了实现更好的清洁效果,清洁机器人配置有水箱,水箱可以为清洁机器人的滚刷、拖布等清洁零部件供水,以对地面实现更好的清洁效果。在清洁机器人工作一段时间后,需要对水箱进行加水、清洗等维护,因此,如何方便地维护水箱成为待解决的技术问题。
技术实现思路
1、本发明提供一种清洁机器人和清洁系统。
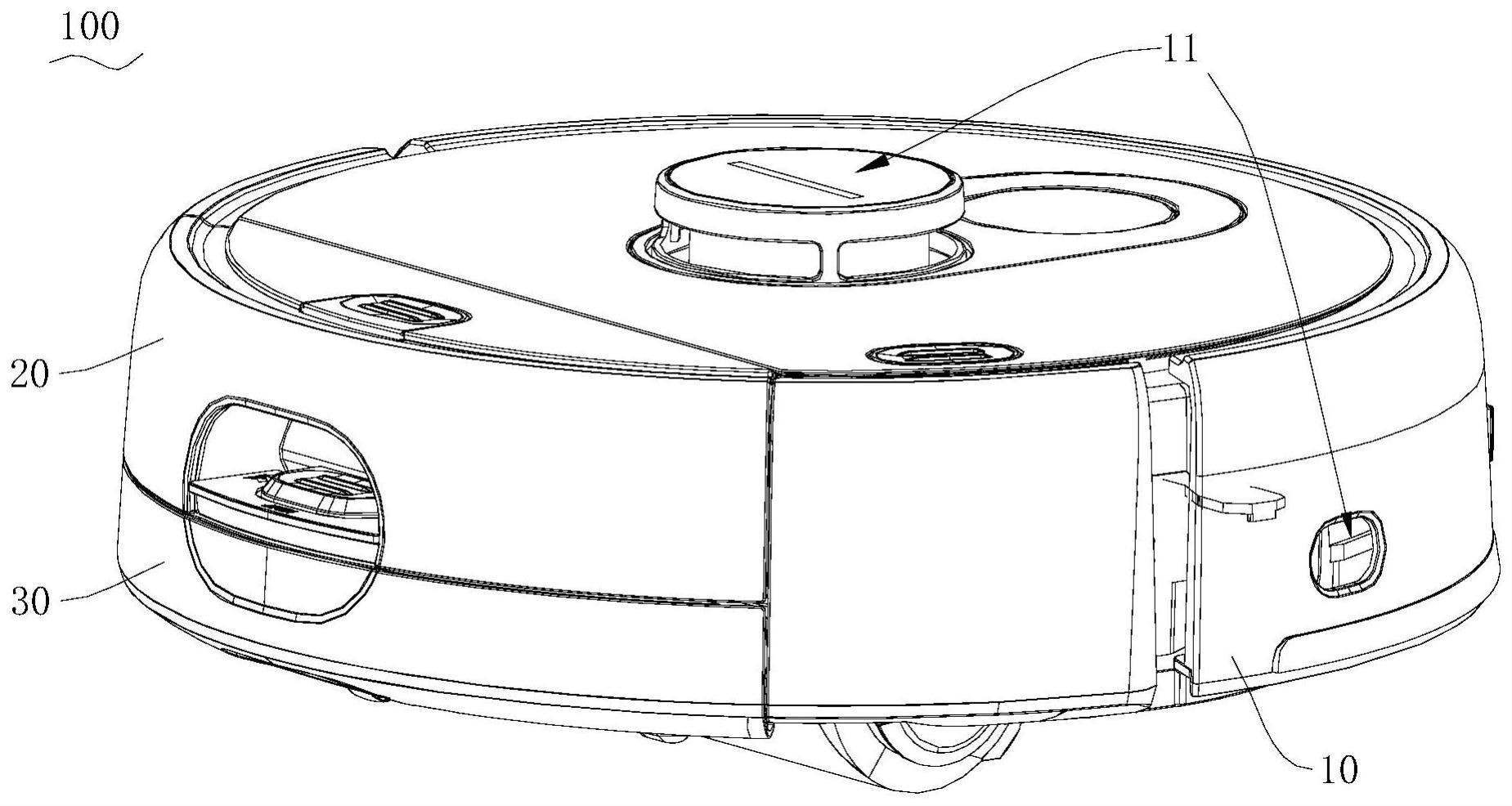
2、本申请实施方式的清洁机器人包括机体、清水箱和污水箱,清水箱与机体可拆卸地连接,污水箱与清水箱可拆卸地连接。
3、本申请实施方式的清洁机器人中,清水箱和污水箱可整体相对于机体拆装,使得清水箱和污水箱容易维护,另外,污水箱与清水箱可拆卸地连接,使得污水箱可以单独地维护,提高清洁机器人维护的方便性。
4、在某些实施方式中,清水箱和污水箱均设置在机体与清洁机器人行进方向相反的一侧。
5、如此,可以减少清水箱和污水箱与清洁机器人的其他零部件的干涉。
6、在某些实施方式中,清水箱包括清水箱体和设置在清水箱体上的第一卡扣件,清水箱通过第一卡扣件与机体扣合连接。
7、如此,通过第一卡扣件使得清水箱容易与机体拆卸和安装。
8、在某些实施方式中,第一卡扣件形成有第一卡勾,机体形成有第一卡合面,第一卡勾与第一卡合面卡合以将清水箱锁定在机体上。
9、如此,通过第一卡勾与第一卡合面卡合使得清水箱容易安装到机体上。
10、在某些实施方式中,清水箱包括设置在清水箱体上的第一按键和与第一按键连接的第一弹性件,第一按键与第一卡扣件连接,第一按键在受到按压时带动第一卡扣件与机体脱离,第一弹性件用于在第一按键受到按压时变形蓄力,并在第一按键卸去外力时驱动第一按键复位。
11、如此,第一按键和第一弹性件配合使得清水箱与机体容易拆卸。
12、在某些实施方式中,机体形成有第一导向结构,清水箱形成有第二导向结构,第一导向结构和第二导向结构配合导引清水箱沿清洁机器人行进的方向滑动地插接在机体上。
13、如此,第一导向结构和第二导向结构配合使得清水箱易于安装在机体上,同时可以限制清水箱的位置,减少清水箱在清洁机器人行进时的晃动。
14、在某些实施方式中,第一导向结构和第二导向结构中的一个具有第一导轨,另一个具有第一导向槽,第一导轨与第一导向槽配合连接。
15、如此,第一导轨和第一导向槽配合使得清水箱易于安装在机体上,同时可以限制清水箱的位置,减少清水箱在清洁机器人行进时的晃动。
16、在某些实施方式中,清水箱形成清洁机器人的部分周向轮廓。如此,这样使得清洁机器人的结构紧凑。
17、在某些实施方式中,污水箱设置在清水箱的底部。
18、如此,污水箱可以相对于清水箱单独拆卸,有利于清洁污水箱,另外,污水箱相对于清水箱的位置更低,污水流动的阻力更小,使得污水箱容易承接清洁装置上的污水。
19、在某些实施方式中,污水箱包括污水箱体和设置在污水箱体上的第二卡扣件,污水箱通过第二卡扣件与清水箱扣合连接。
20、如此,通过第二卡扣件使得污水箱容易与清水箱拆卸和安装。
21、在某些实施方式中,第二卡扣件形成有第二卡勾,清水箱形成有第二卡合面,第二卡勾与第二卡合面卡合以将污水箱锁定在清水箱上。
22、如此,通过第二卡勾与第二卡合面卡合使得污水箱容易安装到清水箱上。
23、在某些实施方式中,污水箱包括设置在污水箱体上的第二按键和与第二按键连接的第二弹性件,第二按键与第二卡扣件连接,第二按键在受到按压时带动第二卡扣件与清水箱脱离,第二弹性件用于在第二按键受到按压时变形蓄力,并在第二按键卸去外力时驱动第二按键复位。
24、如此,第二按键和第二弹性件配合使得污水箱与清水箱容易拆卸。
25、在某些实施方式中,清水箱形成有第三导向结构,污水箱形成有第四导向结构,第三导向结构和第四导向结构配合导引污水箱沿清洁机器人行进的方向滑动地插接在清水箱上。
26、如此,第三导向结构和第四导向结构配合使得污水箱易于安装在清水箱上,同时可以限制污水箱的位置,减少污水箱在清洁机器人行进时的晃动。
27、在某些实施方式中,第三导向结构包括第二导轨,第四导向结构形成有第三导轨,第二导轨与第三导轨配合连接。
28、如此,第二导轨和第三导轨配合使得污水箱易于安装在清水箱上,同时可以限制污水箱的位置,减少污水箱在清洁机器人行进时的晃动。
29、在某些实施方式中,污水箱包括污水箱体,污水箱体包括本体和箱盖,本体设有开口,箱盖盖合开口并位于本体和清水箱之间;第三导轨设置在本体并穿设于箱盖,第三导轨与第二导轨配合限制本体相对于清水箱沿清洁机器人的高度方向运动。
30、如此,本体与清水箱连接可以防止箱盖在清洁机器人工作时被异常打开。
31、本申请实施方式的清洁系统包括基站和清洁机器人,清洁机器人与基站接触。
32、如此,基站可以为清洁机器人提供容置空间并为清洁机器人充电。
33、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述清水箱和所述污水箱均设置在所述机体与所述清洁机器人行进方向相反的一侧。
3.根据权利要求1所述的清洁机器人,其特征在于,所述清水箱包括清水箱体和设置在所述清水箱体上的第一卡扣件,所述清水箱通过所述第一卡扣件与所述机体扣合连接。
4.根据权利要求3所述的清洁机器人,其特征在于,所述第一卡扣件形成有第一卡勾,所述机体形成有第一卡合面,所述第一卡勾与所述第一卡合面卡合以将所述清水箱锁定在所述机体上。
5.根据权利要求3所述的清洁机器人,其特征在于,所述清水箱包括设置在所述清水箱体上的第一按键和与所述第一按键连接的第一弹性件,所述第一按键与所述第一卡扣件连接,所述第一按键在受到按压时带动所述第一卡扣件与所述机体脱离,所述第一弹性件用于在所述第一按键受到按压时变形蓄力,并在所述第一按键卸去外力时驱动所述第一按键复位。
6.根据权利要求1所述的清洁机器人,其特征在于,所述机体形成有第一导向结构,所述清水箱形成有第二导向结构,所述第一导向结构和所述第二导向结构配合导引所述清水箱沿所述清洁机器人行进的方向滑动地插接在所述机体上。
7.根据权利要求6所述的清洁机器人,其特征在于,所述第一导向结构和所述第二导向结构中的一个具有第一导轨,另一个具有第一导向槽,所述第一导轨与所述第一导向槽配合连接。
8.根据权利要求1所述的清洁机器人,其特征在于,所述清水箱形成所述清洁机器人的部分周向轮廓。
9.根据权利要求1所述的清洁机器人,其特征在于,所述污水箱包括污水箱体和设置在所述污水箱体上的第二卡扣件,所述污水箱通过所述第二卡扣件与所述清水箱扣合连接。
10.根据权利要求9所述的清洁机器人,其特征在于,所述第二卡扣件形成有第二卡勾,所述清水箱形成有第二卡合面,所述第二卡勾与所述第二卡合面卡合以将所述污水箱锁定在所述清水箱上。
11.根据权利要求9所述的清洁机器人,其特征在于,所述污水箱包括设置在所述污水箱体上的第二按键和与所述第二按键连接的第二弹性件,所述第二按键与所述第二卡扣件连接,所述第二按键在受到按压时带动所述第二卡扣件与所述清水箱脱离,所述第二弹性件用于在所述第二按键受到按压时变形蓄力,并在所述第二按键卸去外力时驱动所述第二按键复位。
12.根据权利要求1所述的清洁机器人,其特征在于,所述清水箱形成有第三导向结构,所述污水箱形成有第四导向结构,所述第三导向结构和所述第四导向结构配合导引所述污水箱沿所述清洁机器人行进的方向滑动地插接在所述清水箱上。
13.根据权利要求12所述的清洁机器人,其特征在于,所述第三导向结构包括第二导轨,所述第四导向结构形成有第三导轨,所述第二导轨与所述第三导轨配合连接。
14.根据权利要求13所述的清洁机器人,其特征在于,所述污水箱包括污水箱体,所述污水箱体包括本体和箱盖,所述本体设有开口,所述箱盖盖合所述开口并位于所述本体和所述清水箱之间;
15.一种清洁系统,其特征在于,包括:
技术总结
本发明公开了一种清洁机器人和清洁系统。本申请实施方式的清洁机器人包括机体、清水箱和污水箱,清水箱与机体可拆卸地连接,污水箱与清水箱可拆卸地连接。本申请实施方式的清洁机器人中,清水箱和污水箱可整体相对于机体拆装,使得清水箱和污水箱容易维护,另外,污水箱与清水箱可拆卸地连接,使得污水箱可以单独地维护,提高清洁机器人维护的方便性。
技术研发人员:刘亚龙
受保护的技术使用者:深圳市杉川机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!