一种动态工作的悬挂式并驱粮仓清扫机器人及其控制方法
本发明属于机器人与自动化控制,特别涉及一种动态工作的悬挂式并驱粮仓清扫机器人及其控制方法。
背景技术:
1、随着国内人口数量的不断增加,大量粮食长期储备的必要性也不断增大。当粮食存储一定时间后,受粮仓内湿度、生物和物理作用,部分粮食凝固在粮仓壁内,难以自行脱落,对粮食和设备造成影响。
2、长期以来,粮仓清扫工作依赖人工完成。粮仓体积和高度大,且属于密闭环境,人工清理工况恶劣,效率低,劳动强度大,健康和安全问题显著。
技术实现思路
1、为了克服上述现有技术存在的问题,本发明的目的是提供一种绳索与摆锤并驱的粮仓清扫机器人及其动态工作控制方法,利用绳索的伸缩和摆锤的转动,通过动态控制方法可实现动平台的空间三维移动,完成粮仓清扫工作。
2、为了实现上述目的,本发明采用的技术方案是:
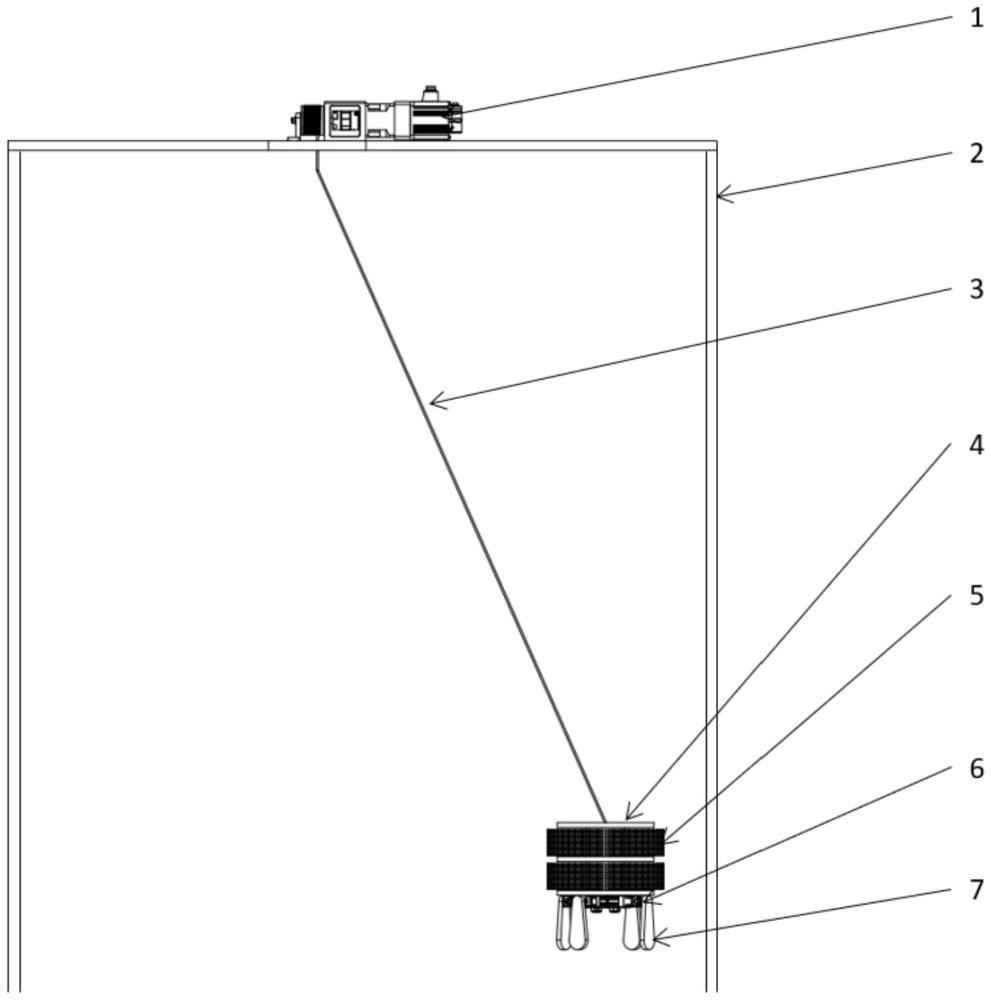
3、一种动态工作的悬挂式并驱粮仓清扫机器人,包括绳索驱动组件1、绳索3、摆锤驱动器6、摆锤7、动平台4和清扫执行器5;绳索驱动组件1安装在粮仓2顶部,绳索3的一端固定于绳索驱动组件1上,另一端连接至动平台4,清扫执行器5安装在动平台4下方,能相对于动平台4旋转,在控制动平台4靠近粮仓壁面时,旋转的清扫执行器5接触粮仓壁面并进行清扫;摆锤驱动器6固定在动平台4的底部并位于清扫执行器5下方,摆锤驱动器6的输出轴连接摆锤7,驱动摆锤7转动;机器人依赖绳索拉力和摆锤转动的反作用力共同驱动,通过动态控制在空间内实现三维运动。
4、优选的,绳索驱动组件1由至少一组电机滚筒装置组成,绳索3的一端固定于电机滚筒上,电机尾端配备编码器,用于实现转角位置测量,用于位置反馈控制。
5、优选的,采用一根或多根绳索驱动,当采用一根绳索驱动时,动平台4存在两个摆动自由度,通过控制摆锤的运动,以尽量减少动平台4摆动的发生;当采用两根平行绳索同步驱动时,动平台4存在一个摆动自由度,通过控制摆锤的运动,以尽量减少动平台4摆动的发生;当采用至少三根不在同一平面内的平行绳索同步驱动时,动平台4的摆动自由度受到约束。
6、优选的,动平台4存在自旋自由度,安装两个清扫执行器或一个清扫执行器和一个水平旋转平衡器,通过控制两个水平旋转的方向和速度,平衡并抑制动平台4的自旋。
7、优选的,摆锤驱动器6位于清扫执行器5的下方,摆锤7摆起最大角度时应仍位于清扫执行器5的直径内部,以避免运动过程中摆锤7和粮仓壁面的干涉,实现周向全方向的可清扫。
8、优选的,至少两组摆锤驱动器6和摆锤7安装在毛刷5的底部,用于和绳索3共同驱动动平台4。
9、优选的,所述清扫执行器为毛刷、清扫棉或气管。
10、所述的动态工作的悬挂式并驱粮仓清扫机器人的控制方法,工作模式包括动态连续清扫和动态间歇清扫;动态连续清扫和动态间歇清扫控制基于绳索驱动组件1和摆锤驱动器6的基运动组合,独立控制绳索收放时,动平台4沿竖直方向产生基运动;独立控制某组摆锤转动时,动平台4沿单摆曲线产生周期性受迫振动基运动,当驱动周期为工作高度下的自然频率时,基运动启动速度最快。独立控制某组摆锤运动时,可以采用正弦激励控制,输入为a为振幅,为相位,频率ω的选取为时启动最快,其中g为重力加速度,h为工作高度。
11、优选的,动态连续清扫时,采用竖直方向基运动和两个相位差pi/4且方向正交的单摆曲线基运动组合,得到螺旋运动轨迹,在运动过程中清扫粮仓壁面,该清扫模式适用于圆形或椭圆形粮仓。
12、优选的,动态间歇清扫时,采用竖直方向基运动和两个无相位差且方向正交的单摆曲线基运动组合,得到实现点到点的摆动,在运动端点处清扫粮仓壁面,通过规划端点位置,实现对粮仓壁面的间歇清扫,该清扫模式适用于方形或异形粮仓。
13、和现有技术相比较,本发明具备如下优点:
14、1、本发明动态工作的悬挂式并驱粮仓清扫机器人,可完成对高大粮仓的清扫工作,现有的粮仓清扫机器人只能清扫粮仓地面和低处墙壁,针对高大粮仓,其高处难以清扫,现有技术只能采用高危险的人工清扫方式。
15、2、本发明动态工作的悬挂式并驱粮仓清扫机器人,提供了一种突破原有索机器人完全驱动和完全约束的设计方法,创新的将欠驱动索机器人应用于粮仓清扫机器人这一实际应用中,并提供了保证其位姿有效性的方式,可以有效的减少驱动数量,降低了机器人整体重量和生产成本。
16、3、本发明动态工作的悬挂式并驱粮仓清扫机器人,通过合理设计清扫执行器和结构件的尺寸,实现周向全方向的可清扫。
17、4、本发明动态工作的悬挂式并驱粮仓清扫机器人,创新性的使用摆锤的反作用力作为动平台驱动力,为悬挂式机器人突破原有工作空间提供了解决方案。
18、5、本发明动态工作的悬挂式并驱粮仓清扫机器人的控制方法,为欠驱动机器人提供了有效的控制方法,其中动态连续清扫可对圆形或椭圆形界面粮仓进行有效的清扫,动态间歇清扫可对方形或异形粮仓进行有效的清扫,而以往的清扫机器人只能对低矮的圆形粮仓进行清扫。
技术特征:
1.一种动态工作的悬挂式并驱粮仓清扫机器人,其特征在于:包括绳索驱动组件(1)、绳索(3)、摆锤驱动器(6)、摆锤(7)、动平台(4)和清扫执行器(5);绳索驱动组件(1)安装在粮仓(2)顶部,绳索(3)的一端固定于绳索驱动组件(1)上,另一端连接至动平台(4),清扫执行器(5)安装在动平台(4)下方,能相对于动平台(4)旋转,在控制动平台(4)靠近粮仓壁面时,旋转的清扫执行器(5)接触粮仓壁面并进行清扫;摆锤驱动器(6)固定在动平台(4)的底部并位于清扫执行器(5)下方,摆锤驱动器(6)的输出轴连接摆锤(7),驱动摆锤(7)转动;机器人依赖绳索拉力和摆锤转动的反作用力共同驱动,通过动态控制在空间内实现三维运动。
2.根据权利要求1所述的动态工作的悬挂式并驱粮仓清扫机器人,其特征在于,绳索驱动组件(1)由至少一组电机滚筒装置组成,绳索(3)的一端固定于电机滚筒上,电机尾端配备编码器,用于实现转角位置测量,用于位置反馈控制。
3.根据权利要求1所述的动态工作的悬挂式并驱粮仓清扫机器人,其特征在于,采用一根或多根绳索驱动,当采用一根绳索驱动时,动平台(4)存在两个摆动自由度,通过控制摆锤的运动,以尽量减少动平台(4)摆动的发生;当采用两根平行绳索同步驱动时,动平台(4)存在一个摆动自由度,通过控制摆锤的运动,以尽量减少动平台(4)摆动的发生;当采用至少三根不在同一平面内的平行绳索同步驱动时,动平台(4)的摆动自由度受到约束。
4.根据权利要求1所述的动态工作的悬挂式并驱粮仓清扫机器人,其特征在于,动平台(4)存在自旋自由度,安装两个清扫执行器或一个清扫执行器和一个水平旋转平衡器,通过控制两个水平旋转的方向和速度,平衡并抑制动平台(4)的自旋。
5.根据权利要求1所述的动态工作的悬挂式并驱粮仓清扫机器人,其特征在于,摆锤驱动器(6)位于清扫执行器(5)的下方,摆锤(7)摆起最大角度时应仍位于清扫执行器(5)的直径内部,以避免运动过程中摆锤(7)和粮仓壁面的干涉。
6.根据权利要求1所述的动态工作的悬挂式并驱粮仓清扫机器人,其特征在于,至少两组摆锤驱动器(6)和摆锤(7)安装在毛刷(5)的底部,用于和绳索(3)共同驱动动平台(4)。
7.根据权利要求1所述的动态工作的悬挂式并驱粮仓清扫机器人,其特征在于,所述清扫执行器(5)为毛刷、清扫棉或气管。
8.权利要求1至7任一项所述的动态工作的悬挂式并驱粮仓清扫机器人的控制方法,其特征在于,工作模式包括动态连续清扫和动态间歇清扫;动态连续清扫和动态间歇清扫控制基于绳索驱动组件(1)和摆锤驱动器(6)的基运动组合,独立控制绳索收放时,动平台(4)沿竖直方向产生基运动;独立控制某组摆锤转动时,动平台(4)沿单摆曲线产生周期性受迫振动基运动,当驱动周期为工作高度下的自然频率时,基运动启动速度最快。
9.根据权利要求8所述的控制方法,其特征在于,动态连续清扫时,采用竖直方向基运动和两个相位差pi/4且方向正交的单摆曲线基运动组合,得到螺旋运动轨迹,在运动过程中清扫粮仓壁面,该清扫模式适用于圆形或椭圆形粮仓。
10.根据权利要求8所述的控制方法,其特征在于,动态间歇清扫时,采用竖直方向基运动和两个无相位差且方向正交的单摆曲线基运动组合,得到实现点到点的摆动,在运动端点处清扫粮仓壁面,通过规划端点位置,实现对粮仓壁面的间歇清扫,该清扫模式适用于方形或异形粮仓。
技术总结
本发明公开了一种动态工作的悬挂式并驱粮仓清扫机器人及其控制方法,机器人包括绳索驱动组件,绳索,摆锤驱动器,摆锤,动平台和清扫执行器,工作模式包括动态连续清扫和动态间歇清扫。绳索驱动组件由至少一组电机滚筒装置组成,安装在粮仓顶部。绳索的一端固定于电机滚筒上,另一端连接至动平台。毛刷安装在动平台下方,可相对于动平台旋转,在动平台靠近粮仓壁面时,旋转的毛刷接触壁面并进行清扫。摆锤驱动器安装在毛刷下方,驱动摆锤转动。摆锤转动的反作用力和绳索共同驱动动平台运动,在空间内实现三维运动。本发明为粮仓清扫工作提供了一种新的解决方案,且具有显著的轻量化特点,可实现安全、低成本、高效的粮仓清扫。
技术研发人员:邵珠峰,刘汉擎,高米克,杭肠,段金昊,姚铭,霍晔
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!