清洁机器人及脱困方法与流程
本发明涉及清洁机器人脱困领域,具体是一种清洁机器人及脱困方法。
背景技术:
1、近年来,清洁机器人在家庭中的使用频率越来越高,其外形也从普遍的圆形逐渐发展出了d字形、方形等形状。而目前清洁机器人遇到的一个普遍问题就是被家庭中一些复杂的环境困住,最常见的就是狭窄区域。例如床与墙壁之间形成的狭小通道,对于清洁机器人来说,进入该通道发生碰撞后,会采取后退、旋转到预设角度,再次向前的动作。但由于通道狭窄,圆形机器人会出现每次旋转后再次前行又会发生碰撞的情况,最终要在其中产生多次旋转碰撞才能出来。且下一次清扫过程中又会重复进入,造成二次脱困,影响清扫效率。而对于d字形、方形等清洁机器人来说,由于机身前后长度和左右宽度不一致,且前后长度要长于左右宽度。这就导致机器人以直行方式进入这种狭窄通道后,产生碰撞时,机身无法旋转到预设角度就又会产生碰撞,从而出现一直在原地进行小幅度摆动的问题。
技术实现思路
1、为了便于清洁机器人脱困,本申请提供了一种清洁机器人及脱困方法。
2、本发明解决上述问题所采用的技术方案是:
3、清洁机器人,包括机器人本体,还包括:
4、障碍物检测模块,用于检测障碍物;
5、被困判断模块:用于根据检测到的障碍物判断清洁机器人是否被困,若是,则进入脱困模式;若否,则正常工作;
6、通行方向计算模块,用于根据障碍物检测模块的检测结果及清洁机器人自身尺寸寻找最近的可通行区域;
7、脱困动作模块,用于根据可通行区域控制清洁机器人脱困;
8、禁区设置模块,用于根据清洁机器人的被困及脱困情况设置行走禁区。
9、进一步地,所述障碍物检测模块具体为激光雷达。
10、进一步地,所述障碍物检测模块还包括设置在机器人本体左右两侧的距离传感器。
11、进一步地,所述距离传感器为结构光传感器或红外传感器。
12、进一步地,所述机器人本体为d字型。
13、清洁机器人脱困方法,应用于清洁机器人,包括:
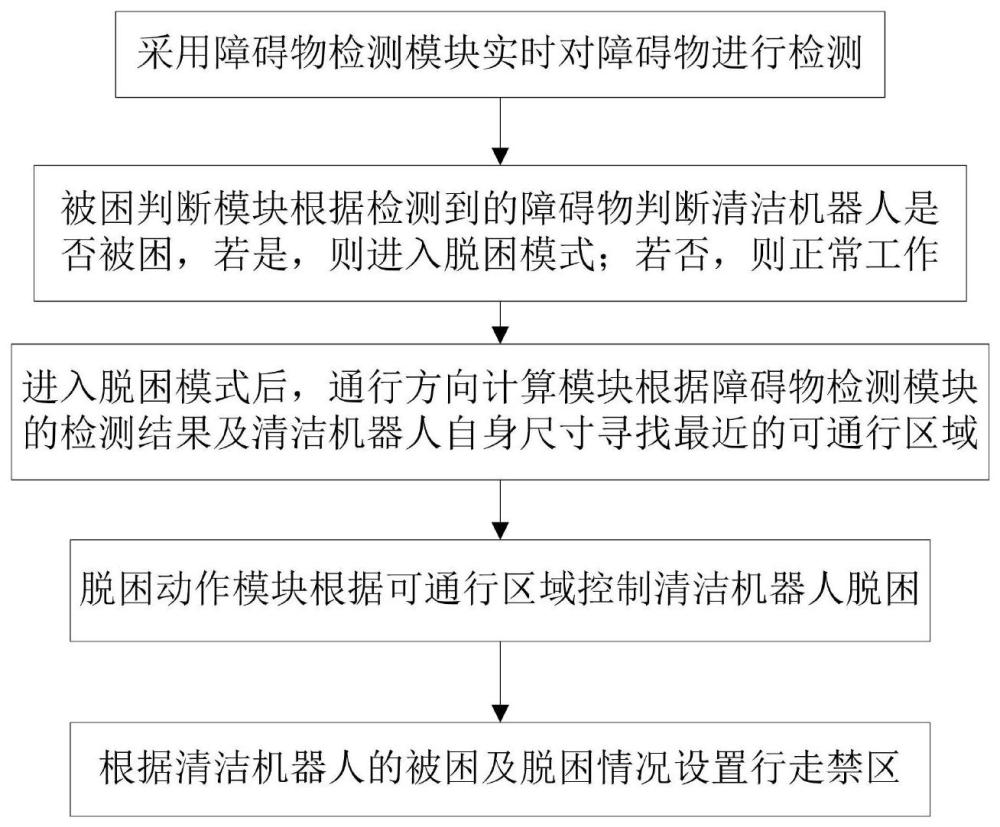
14、步骤1、采用障碍物检测模块实时对障碍物进行检测;
15、步骤2、被困判断模块根据检测到的障碍物判断清洁机器人是否被困,若是,则进入脱困模式;若否,则正常工作;
16、步骤3、进入脱困模式后,通行方向计算模块根据障碍物检测模块的检测结果及清洁机器人自身尺寸寻找最近的可通行区域;
17、步骤4、脱困动作模块根据可通行区域控制清洁机器人脱困;
18、步骤5、根据清洁机器人的被困及脱困情况设置行走禁区。
19、进一步地,所述步骤2具体为:若左侧被困阈值距离内和右侧被困阈值距离内同时存在障碍物则判定清洁机器人被困。
20、进一步地,所述被困阈值为清洁机器人最大半径与最小半径之差。
21、进一步地,所述步骤5具体为:脱困模式下,记录清洁机器人中心坐标形成的行走轨迹,以清洁机器人最大半径为膨胀半径对行走轨迹进行膨胀,将膨胀后的区域设置为行走禁区。
22、进一步地,所述步骤3在寻找最近的可通行区域时,还包括结合清洁机器人的运动轨迹。
23、本发明相比于现有技术具有的有益效果是:通过对机身自身尺寸信息进行计算而得出被困阈值,可以使得机器人自适应地根据自身尺寸信息做出更为准确的被困检测及脱困动作,并建立与自身尺寸信息相匹配的被困禁区,解决不同形状机器人在清扫过程中被一些狭窄环境所困住而不能正常进行清扫行动,以及后续清扫过程中重复被困的问题。此外,通过设置激光雷达对障碍物进行检测,有效避免了机器人与障碍物的碰撞,用户使用体验感更好。
技术特征:
1.清洁机器人,包括机器人本体,其特征在于,还包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述障碍物检测模块具体为激光雷达。
3.根据权利要求2所述的清洁机器人,其特征在于,所述障碍物检测模块还包括设置在机器人本体左右两侧的距离传感器。
4.根据权利要求3所述的清洁机器人,其特征在于,所述距离传感器为结构光传感器或红外传感器。
5.根据权利要求1-4任意一项所述的清洁机器人,其特征在于,所述机器人本体为d字型。
6.清洁机器人脱困方法,应用于权利要求1-5任意一项所述的清洁机器人,其特征在于,包括:
7.根据权利要求6所述的清洁机器人脱困方法,其特征在于,所述步骤2具体为:若左侧被困阈值距离内和右侧被困阈值距离内同时存在障碍物则判定清洁机器人被困。
8.根据权利要求7所述的清洁机器人脱困方法,其特征在于,所述被困阈值为清洁机器人最大半径与最小半径之差。
9.根据权利要求6所述的清洁机器人脱困方法,其特征在于,所述步骤5具体为:脱困模式下,记录清洁机器人中心坐标形成的行走轨迹,以清洁机器人最大半径为膨胀半径对行走轨迹进行膨胀,将膨胀后的区域设置为行走禁区。
10.根据权利要求6-9任意一项所述的清洁机器人脱困方法,其特征在于,所述步骤3在寻找最近的可通行区域时,还包括结合清洁机器人的运动轨迹。
技术总结
本发明涉及清洁机器人脱困领域,为了便于清洁机器人脱困,提供了清洁机器人及脱困方法,通过对机身自身尺寸信息进行计算而得出被困阈值,可以使得机器人自适应地根据自身尺寸信息做出更为准确的被困检测及脱困动作,并建立与自身尺寸信息相匹配的被困禁区,解决不同形状机器人在清扫过程中被一些狭窄环境所困住而不能正常进行清扫行动,以及后续清扫过程中重复被困的问题。此外,通过设置激光雷达对障碍物进行检测,有效避免了机器人与障碍物的碰撞,用户使用体验感更好。
技术研发人员:金秀芬
受保护的技术使用者:四川启睿克科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!