一种清洁机器人用自动抬升清洁装置的制作方法
本技术属于清洁机器人设备,特别是涉及一种清洁机器人用自动抬升清洁装置。
背景技术:
1、在现有的清洁机器人及其相关清洁模块中,扫地机器人用于直接与地面接触的清洁模块往往只能保持在同一高度上或仅仅有小幅度的被动升降,导致机器人的灵活性不够,无法跨越较高的障碍,无法做到全屋全范围的清扫。同时现有的清洁模块在遇到长毛地毯等厚度较厚的地毯时,抬升的高度无法超过地毯的厚度,仍会污染地毯。
2、同样的,在机器人需要回到基站或前往其他清洁区域的过程中,机器人会行驶到已经清洁过的区域上,此时清洁模块上沾染的脏污会对已清洁过的地面造成二次污染。
技术实现思路
1、本实用新型的目的在于提供一种清洁机器人用自动抬升清洁装置,通过将上抬升模块与下旋转清洁模块活动连接,上抬升模块驱动下旋转清洁模块上下移动,每个旋转清洁刮盘组套的底部设置有用于清洁地面的清洁装置,解决了现有的问题。
2、为解决上述技术问题,本实用新型是通过以下技术方案实现的:
3、本实用新型为一种清洁机器人用自动抬升清洁装置,包括上抬升模块和下旋转清洁模块;所述上抬升模块与下旋转清洁模块活动连接;所述上抬升模块驱动下旋转清洁模块上下移动;所述上抬升模块包括传动安装支架、抬升减速电机、第一转轴组套、第二转轴组套、第四锥形齿轮;所述下旋转清洁模块包括旋转刮盘安装座、旋转减速电机安装支架、旋转减速电机、输入齿轮组套、旋转清洁刮盘组套、传动齿轮组套、第一皮带、第二皮带、齿条。
4、作为本实用新型的一种优选技术方案,所述第一转轴组套包括第一转轴杆、第一铜套、第一锥形齿轮、第二锥形齿轮、第一齿轮;所述第一转轴杆转动安装在传动安装支架上;所述第一转轴杆的左半部分从左至右依次固定套设有第一铜套、第一齿轮、第一锥形齿轮;所述第一转轴杆的右半部分从左至右依次固定套设有第一铜套、第二锥形齿轮、第一锥形齿轮、第一齿轮、第一铜套。
5、作为本实用新型的一种优选技术方案,所述第二转轴组套设置有一对;所述第二转轴组套包括第二转轴杆、第二铜套、第三锥形齿轮、第二齿轮;所述第二转轴杆转动安装在传动安装支架上;所述第二转轴杆从上至下依次固定套设有第三锥形齿轮、第二铜套、第二齿轮。
6、作为本实用新型的一种优选技术方案,所述第一转轴杆的左半部分的第一锥形齿轮与其中一个第二转轴组套的第三锥形齿轮啮合连接;所述第一转轴杆的右半部分的第一锥形齿轮与另一个第二转轴组套的第三锥形齿轮啮合连接。
7、作为本实用新型的一种优选技术方案,所述传动安装支架上安装有抬升减速电机;所述抬升减速电机的输出轴上固定套设有第四锥形齿轮。
8、作为本实用新型的一种优选技术方案,所述第一转轴杆的右半部分的第二锥形齿轮与第四锥形齿轮啮合连接。
9、作为本实用新型的一种优选技术方案,所述旋转刮盘安装座上固定安装有旋转减速电机安装支架;所述旋转减速电机安装支架上固定安装有旋转减速电机;所述旋转减速电机的输出端活动安装有输入齿轮组套。
10、作为本实用新型的一种优选技术方案,所述旋转刮盘安装座上活动安装有三个旋转清洁刮盘组套,中间的旋转清洁刮盘组套上设置有传动齿轮组套,右侧的旋转清洁刮盘组套上的皮带轮与传动齿轮组套上的皮带轮通过第一皮带传动连接,左侧的旋转清洁刮盘组套上的皮带轮与输入齿轮组套上的皮带轮通过第二皮带传动连接,每个旋转清洁刮盘组套的底部设置有用于清洁地面的清洁装置。
11、作为本实用新型的一种优选技术方案,所述传动齿轮组套上的齿轮与输入齿轮组套上的齿轮啮合连接。
12、作为本实用新型的一种优选技术方案,所述旋转刮盘安装座上固定连接有四个齿条,其中两个齿条均与第一齿轮啮合连接,另两个齿条均与第二齿轮啮合连接。
13、本实用新型具有以下有益效果:
14、本实用新型通过将上抬升模块与下旋转清洁模块活动连接,上抬升模块驱动下旋转清洁模块上下移动,每个旋转清洁刮盘组套的底部设置有用于清洁地面的清洁装置,通过下旋转清洁模块的自动升降来避免清洁机器人在清洁工作过程中无法跨越较高的障碍,使得清洁机器人能够做到全屋全范围的清扫;同时通过将下旋转清洁模块的主动抬升来避免在回充和转移的过程中对已清洁过的区域造成二次污染。
15、当然,实施本实用新型的任一产品并不一定需要同时达到以上的所有优点。
技术特征:
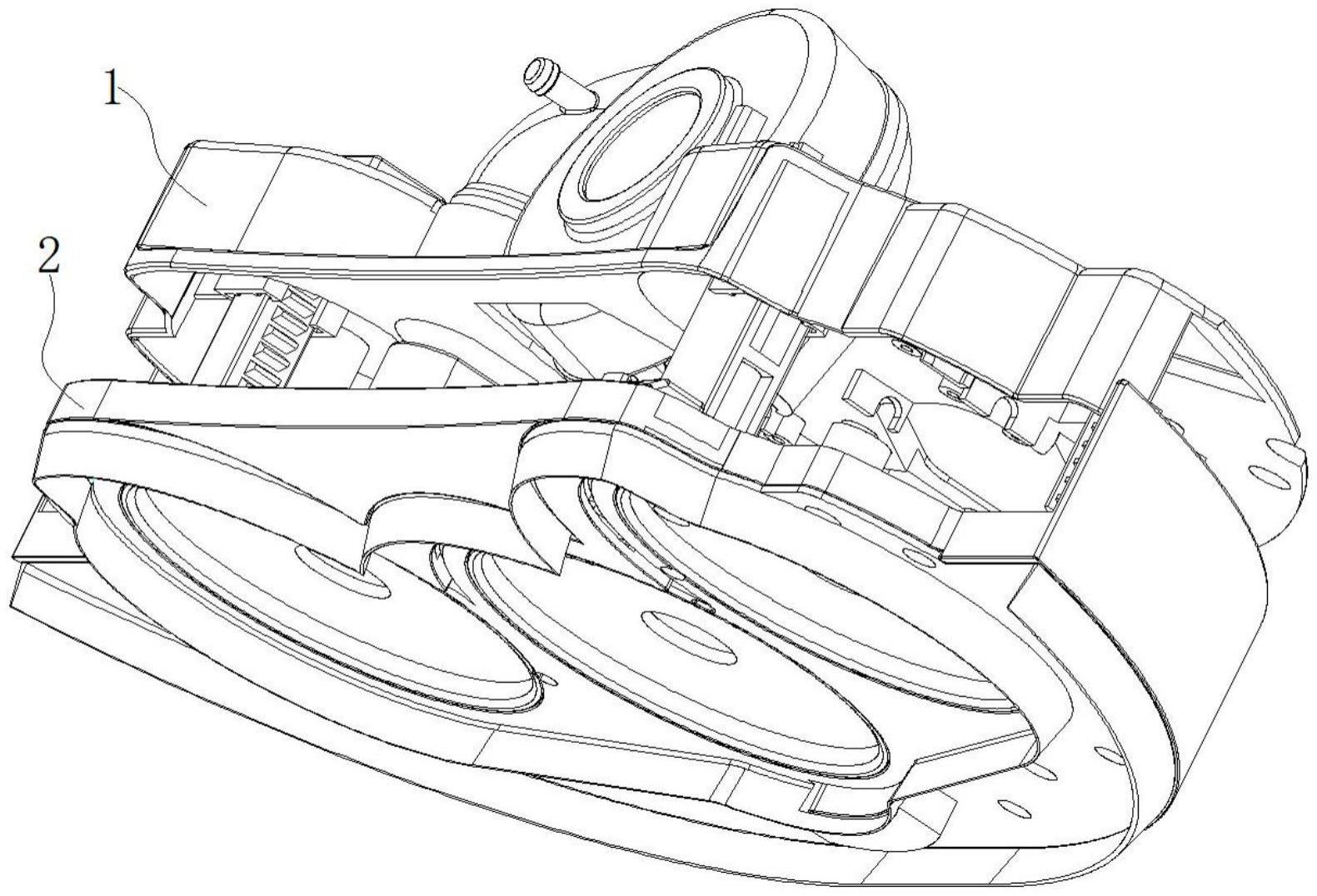
1.一种清洁机器人用自动抬升清洁装置,其特征在于:包括上抬升模块(1)和下旋转清洁模块(2);
2.根据权利要求1所述的一种清洁机器人用自动抬升清洁装置,其特征在于:所述第一转轴组套(5)包括第一转轴杆(501)、第一铜套(502)、第一锥形齿轮(503)、第二锥形齿轮(504)、第一齿轮(505);
3.根据权利要求2所述的一种清洁机器人用自动抬升清洁装置,其特征在于:所述第二转轴组套(6)设置有一对;所述第二转轴组套(6)包括第二转轴杆(601)、第二铜套(602)、第三锥形齿轮(603)、第二齿轮(604);
4.根据权利要求3所述的一种清洁机器人用自动抬升清洁装置,其特征在于:所述第一转轴杆(501)的左半部分的第一锥形齿轮(503)与其中一个第二转轴组套(6)的第三锥形齿轮(603)啮合连接;
5.根据权利要求4所述的一种清洁机器人用自动抬升清洁装置,其特征在于:所述传动安装支架(3)上安装有抬升减速电机(4);所述抬升减速电机(4)的输出轴上固定套设有第四锥形齿轮(7)。
6.根据权利要求5所述的一种清洁机器人用自动抬升清洁装置,其特征在于:所述第一转轴杆(501)的右半部分的第二锥形齿轮(504)与第四锥形齿轮(7)啮合连接。
7.根据权利要求6所述的一种清洁机器人用自动抬升清洁装置,其特征在于:所述旋转刮盘安装座(8)上固定安装有旋转减速电机安装支架(9);所述旋转减速电机安装支架(9)上固定安装有旋转减速电机(10);所述旋转减速电机(10)的输出端活动安装有输入齿轮组套(11)。
8.根据权利要求7所述的一种清洁机器人用自动抬升清洁装置,其特征在于:所述旋转刮盘安装座(8)上活动安装有三个旋转清洁刮盘组套(12),中间的旋转清洁刮盘组套(12)上设置有传动齿轮组套(13),右侧的旋转清洁刮盘组套(12)上的皮带轮与传动齿轮组套(13)上的皮带轮通过第一皮带(14)传动连接,左侧的旋转清洁刮盘组套(12)上的皮带轮与输入齿轮组套(11)上的皮带轮通过第二皮带(15)传动连接,每个旋转清洁刮盘组套(12)的底部设置有用于清洁地面的清洁装置。
9.根据权利要求8所述的一种清洁机器人用自动抬升清洁装置,其特征在于:所述传动齿轮组套(13)上的齿轮与输入齿轮组套(11)上的齿轮啮合连接。
10.根据权利要求9所述的一种清洁机器人用自动抬升清洁装置,其特征在于:所述旋转刮盘安装座(8)上固定连接有四个齿条(16),其中两个齿条(16)均与第一齿轮(505)啮合连接,另两个齿条(16)均与第二齿轮(604)啮合连接。
技术总结
本技术公开了一种清洁机器人用自动抬升清洁装置,涉及清洁机器人设备技术领域。包括上抬升模块和下旋转清洁模块,上抬升模块与下旋转清洁模块活动连接,上抬升模块驱动下旋转清洁模块上下移动,每个旋转清洁刮盘组套的底部设置有用于清洁地面的清洁装置。通过下旋转清洁模块的自动升降来避免清洁机器人在清洁工作过程中无法跨越较高的障碍,使得清洁机器人能够做到全屋全范围的清扫;同时通过将下旋转清洁模块的主动抬升来避免在回充和转移的过程中对已清洁过的区域造成二次污染。
技术研发人员:陈星安,杨义山,张宇强,袁超,尚鹏,李明,赵秉新
受保护的技术使用者:合肥长虹美菱生活电器有限公司
技术研发日:20230208
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!