一种烹饪翻炒用工业机器人的制作方法
本申请涉及工业机器人领域,特别涉及一种烹饪翻炒用工业机器人。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
2、烹饪翻炒用工业机器人首先要将复杂的中国菜烹饪工艺与动作进行分解与定义,并用机器人专业与烹饪专业均能理解的语言进行描述,由于炒菜过程中油烟多,所以在烹饪翻炒用工业机器人的外壁要绑定一层套合外罩,减少油烟附着烹饪翻炒用工业机器人内部零件产生的侵蚀,但此套合外罩需要经常人工清洗,费时费力。
3、因此需要设计一种具有附着颗粒物自处理的烹饪翻炒用工业机器人来解决此问题。
技术实现思路
1、本申请目的在于设计一种具有附着颗粒物自处理的烹饪翻炒用工业机器人,相比现有技术提供一种烹饪翻炒用工业机器人,通过工业机器人本体,工业机器人本体的左侧下端固定连接有底座,工业机器人本体的右侧下端螺纹连接有卡合块,卡合块的下端对称卡合有锅铲,锅铲的下端设置有炒菜台,且炒菜台与两个锅铲之间相互配合,底座的外端固定连接有u型存水包框,底座的内端安装有电动绕线器,电动绕线器的外端绕接有拉伸弹绳,拉伸弹绳远离电动绕线器的一端固定连接有弹性夹,工业机器人本体的外端包裹有套合外罩,弹性夹夹紧在套合外罩的上端,套合外罩的右端下侧固定连接有下箍松紧口,且下箍松紧口箍合在锅铲与工业机器人本体的连接处。
2、本方案可通过拉伸弹绳与套合外罩的尽头处夹持,并通过电动绕线器不断收卷拉伸弹绳将套合外罩不断下拨动至u型存水包框内,将套合外罩充分浸润在u型存水包框内的清洁液中,充分分解油污,减少人工处理的繁琐性,有效提高工业机器人本体的使用性能。
3、进一步,u型存水包框的内端填充有清洗液,套合外罩与清洗液相浸润。
4、进一步,套合外罩的中部外端固定连接有中箍松紧口,且中箍松紧口与工业机器人本体相配合,通过设置中箍松紧口可在工业机器人本体的中部节点位置有效加强箍合力。
5、可选的,u型存水包框的外端还固定连接有电动环形滑槽,电动环形滑槽的内端滑动连接有安装柱。
6、进一步,安装柱靠近u型存水包框的一端固定连接有竖条状刷头。
7、进一步,竖条状刷头延伸至u型存水包框内,并与套合外罩的外壁相接触,通过竖条状刷头通过电动环形滑槽在u型存水包框内沿工业机器人本体外壁转动摩擦,有效将浸泡了一段时间后的套合外罩外壁刷动,进一步减少污渍残留,加强油污剥离效率。
8、相比于现有技术,本申请的优点在于:
9、(1)使用本装置时,本方案可通过拉伸弹绳与套合外罩的尽头处夹持,并通过电动绕线器不断收卷拉伸弹绳将套合外罩不断下拨动至u型存水包框内,将套合外罩充分浸润在u型存水包框内的清洁液中,充分分解油污,减少人工处理的繁琐性,有效提高工业机器人本体的使用性能。
10、(2)此外在u型存水包框外设置有电动环形滑槽,电动环形滑槽与竖条状刷头连接,竖条状刷头通过电动环形滑槽在u型存水包框内沿工业机器人本体外壁转动摩擦,有效将浸泡了一段时间后的套合外罩外壁刷动,进一步减少污渍残留,加强油污剥离效率。
11、(3)同时套合外罩的中部设置有中箍松紧口,中箍松紧口可在工业机器人本体的中部节点位置加强箍合力,减少套合外罩的松脱感,令套合外罩在工业机器人本体外的使用环境更加利落贴合。
技术特征:
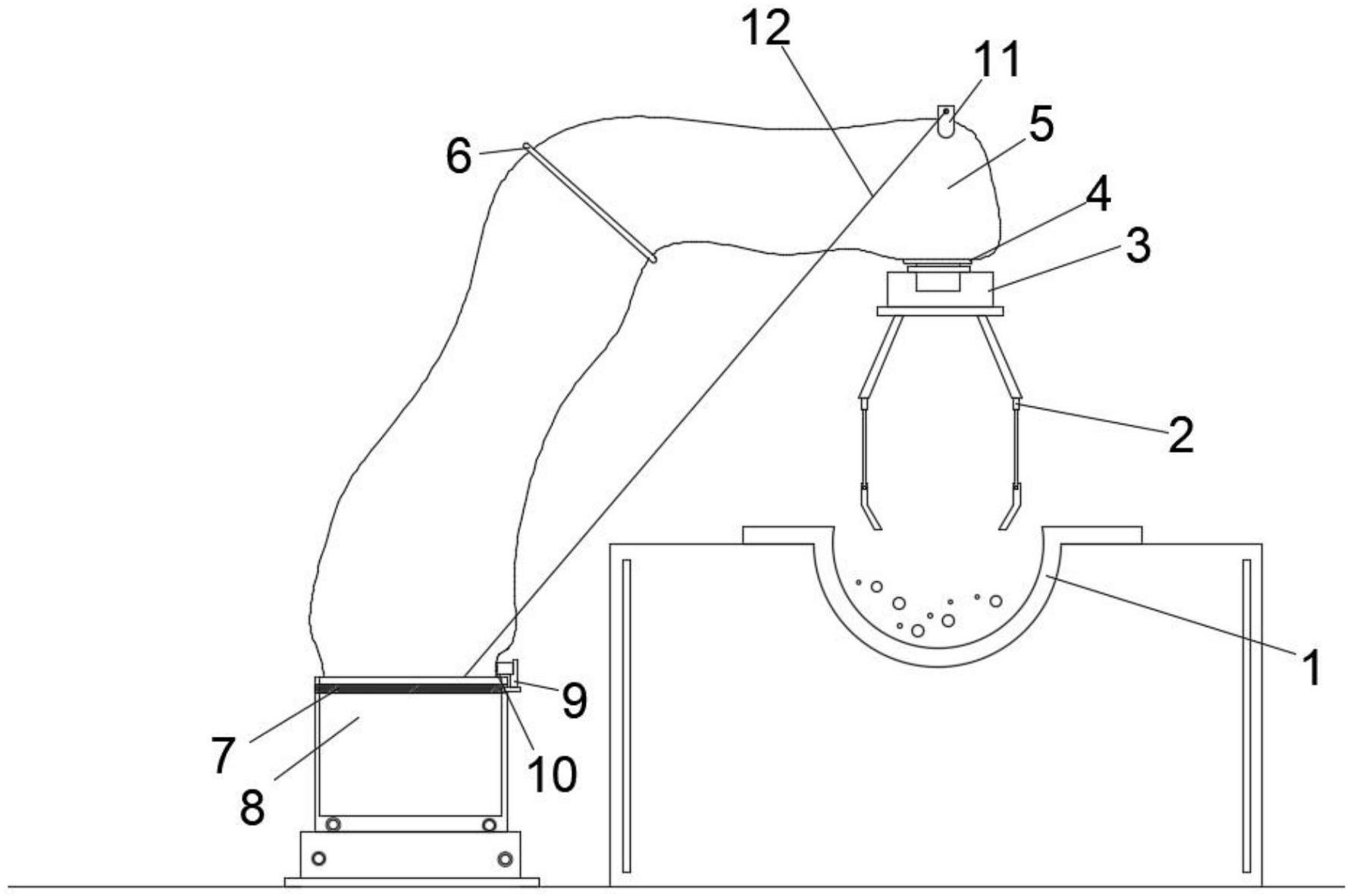
1.一种烹饪翻炒用工业机器人,包括工业机器人本体(13),其特征在于,所述工业机器人本体(13)的左侧下端固定连接有底座,所述工业机器人本体(13)的右侧下端螺纹连接有卡合块(3),所述卡合块(3)的下端对称卡合有锅铲(2),所述锅铲(2)的下端设置有炒菜台(1),且炒菜台(1)与两个锅铲(2)之间相互配合,所述底座的外端固定连接有u型存水包框(8),所述底座的内端安装有电动绕线器(14),所述电动绕线器(14)的外端绕接有拉伸弹绳(12),所述拉伸弹绳(12)远离电动绕线器(14)的一端固定连接有弹性夹(11),所述工业机器人本体(13)的外端包裹有套合外罩(5),所述弹性夹(11)夹紧在套合外罩(5)的上端,所述套合外罩(5)的右端下侧固定连接有下箍松紧口(4),且下箍松紧口(4)箍合在锅铲(2)与工业机器人本体(13)的连接处。
2.根据权利要求1所述的一种烹饪翻炒用工业机器人,其特征在于,所述u型存水包框(8)的内端填充有清洗液,所述套合外罩(5)与清洗液相浸润。
3.根据权利要求1所述的一种烹饪翻炒用工业机器人,其特征在于,所述套合外罩(5)的中部外端固定连接有中箍松紧口(6),且中箍松紧口(6)与工业机器人本体(13)相配合。
4.根据权利要求1所述的一种烹饪翻炒用工业机器人,其特征在于,所述u型存水包框(8)的外端还固定连接有电动环形滑槽(7),所述电动环形滑槽(7)的内端滑动连接有安装柱(9)。
5.根据权利要求4所述的一种烹饪翻炒用工业机器人,其特征在于,所述安装柱(9)靠近u型存水包框(8)的一端固定连接有竖条状刷头(10)。
6.根据权利要求5所述的一种烹饪翻炒用工业机器人,其特征在于,所述竖条状刷头(10)延伸至u型存水包框(8)内,并与套合外罩(5)的外壁相接触。
技术总结
本技术提供了应用于工业机器人领域的一种烹饪翻炒用工业机器人,通过工业机器人本体,工业机器人本体的左侧下端固定连接有底座,工业机器人本体的右侧下端螺纹连接有卡合块,卡合块的下端对称卡合有锅铲,锅铲的下端设置有炒菜台,且炒菜台与两个锅铲之间相互配合,底座的外端固定连接有U型存水包框,底座的内端安装有电动绕线器,本方案可通过拉伸弹绳与套合外罩的尽头处夹持,并通过电动绕线器不断收卷拉伸弹绳将套合外罩不断下拨动至U型存水包框内,将套合外罩充分浸润在U型存水包框内的清洁液中,充分分解油污,减少人工处理的繁琐性,有效提高工业机器人本体的使用性能。
技术研发人员:毛星炎
受保护的技术使用者:江苏专维智能制造有限公司
技术研发日:20230216
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!