前撞板及清洁机器人的制作方法
本技术涉及清洁机器人,尤其涉及一种前撞板及清洁机器人。
背景技术:
1、随着扫地机技术的发展,市场上清洁机器人已经逐渐成为主流,清洁机器人包括拖地机器人或拖扫一体机器人。清洁机器人工作过程中可能与障碍物或者墙壁发生碰撞,容易造成清洁机器人损坏。现有的清洁机器人包括壳体和设置在壳体前方的前撞板,前撞板包括主体和两个弹片,两个弹片分别设置在前撞板的左侧和右侧。当前撞板左右两侧发生碰撞时,弹片的弹性变形吸收前撞板的碰撞力,从而起到保护前撞板的目的。但是现有技术中,清洁机器人形态为d型或者方形,扫地机器人的前撞板不容易实现左右两侧侧面垂直碰撞,在狭小空间发生碰撞时由于侧面无法直接碰撞,导致机器人弹片作用无法实现,且前撞板碰撞体验差、噪声大。
2、为解决上述问题,亟待提供一种前撞板及清洁机器人,解决以上问题。
技术实现思路
1、本实用新型的一个目的是提出一种前撞板,以达到简化前撞板结构,且前撞板任意位置发生碰撞,均能触发弹性件吸收碰撞力,减少前撞板碰撞触发所需的触发力的效果。
2、本实用新型的另一个目的是提出一种清洁机器人,通过设置上述前撞板,有利于提高清洁机器人碰撞体验感,减少噪音的效果。
3、为达此目的,本实用新型采用以下技术方案:
4、一种前撞板,设置在清洁机器人行进方向的壳体的外侧,所述前撞板包括:
5、主体,与所述壳体连接,所述主体中部设有卡槽;以及
6、弹片,设置在所述卡槽中,沿第一方向,所述弹片的两侧与所述卡槽过盈配合,当所述主体受外力撞击时,所述弹片能够发生弹性变形。
7、作为一种可选方案,所述弹片包括:
8、至少两个凸起,至少两个所述凸起沿所述第一方向间隔设置,且凸起为u型结构,位于首尾的两个所述凸起分别与所述卡槽过盈配合;以及
9、连接部,所述连接部的两端分别与相邻两个所述凸起的相邻的自由端连接。
10、作为一种可选方案,所述主体或所述壳体上设有沿所述第一方向延伸的第一限位槽,所述弹片还包括:
11、第一限位件,设置在所述连接部上,所述弹片位于所述卡槽中时,所述连接部位于所述第一限位槽中,且所述第一限位件被配置为约束所述连接部沿第一方向移动。
12、作为一种可选方案,所述卡槽包括
13、两个转折部,两个所述转折部相对设置,且均与所述主体连接,沿远离所述主体的方向,两个所述转折部的距离逐渐增大;以及
14、两个限位部,两个所述限位部分别与两个所述转折部一一对应连接,且两个所述限位部被配置为约束所述弹片沿所述第一方向的两侧。
15、作为一种可选方案,所述前撞板还包括弹性组件,所述弹性组件包括:
16、触发开关,设置在所述主体上,所述主体发生碰撞时,所述触发开关发生摆动;以及
17、第二限位件,设置在所述壳体上,所述第二限位件被配置为约束所述触发开关摆动的最大角度。
18、作为一种可选方案,所述触发开关包括:
19、摆杆,一端与所述主体连接;
20、触发件,所述摆杆与所述触发件铰接,且所述触发件中设有导向槽,所述摆杆的局部位于所述导向槽中,所述导向槽被配置为所述摆杆摆动提供导向;
21、复位件,设置在所述摆杆和所述触发件之间,所述复位件被配置为驱动所述摆杆复位。
22、作为一种可选方案,所述主体包括:
23、固定板,与所述壳体连接;以及
24、浮动板,可移动设置在所述固定板上,所述前撞板发生碰撞时,所述浮动板能够相对所述固定板移动预设距离。
25、作为一种可选方案,所述浮动板或所述固定板上设有第二限位槽,未设置所述第二限位槽的所述浮动板或所述固定板上设有限位柱,所述前撞板发生碰撞时,所述限位柱在所述第二限位槽的范围内移动。
26、作为一种可选方案,所述主体还包括:
27、缓冲件,套设在所述限位柱上,且所述缓冲件的外径与所述第二限位槽的内壁间隔设置。
28、一种清洁机器人,包括如上所述的前撞板。
29、本实用新型的有益效果为:
30、本实用新型提供一种前撞板,该前撞板设置在清洁机器人的壳体的前方,前撞板包括主体和弹片,主体与壳体连接,主体上设有卡槽,弹片设置在卡槽中,沿第一方向,弹片的两侧与卡槽过盈配合,当主体受外力撞击时,弹片能够发生弹性变形,该前撞板有利于简化前撞板结构,且便于组装,利用弹片的两侧与卡槽过盈配合,使前撞板左右和前方任意位置发生碰撞,均能触发弹性件吸收碰撞力,减少前撞板碰撞触发所需的触发力。
技术特征:
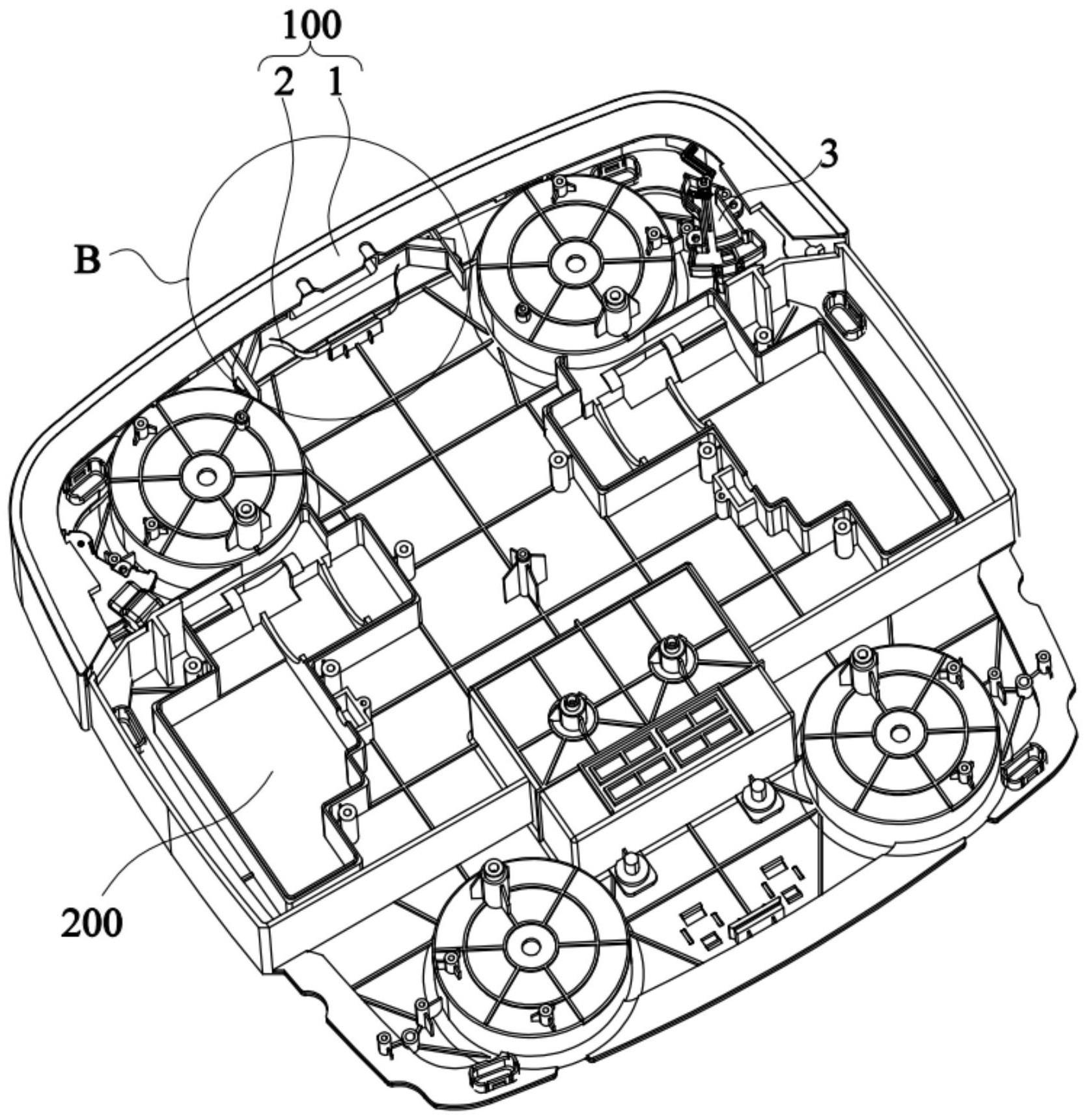
1.一种前撞板,其特征在于,设置在清洁机器人行进方向的壳体(200)的外侧,所述前撞板包括:
2.根据权利要求1所述的前撞板,其特征在于,所述弹片(2)包括:
3.根据权利要求2所述的前撞板,其特征在于,所述主体(1)或所述壳体(200)上设有沿所述第一方向延伸的第一限位槽(12),所述弹片(2)还包括:
4.根据权利要求1所述的前撞板,其特征在于,所述卡槽(11)包括
5.根据权利要求1所述的前撞板,其特征在于,所述前撞板还包括弹性组件(3),所述弹性组件(3)包括:
6.根据权利要求5所述的前撞板,其特征在于,所述触发开关(31)包括:
7.根据权利要求1~6任一项所述的前撞板,其特征在于,所述主体(1)包括:
8.根据权利要求7所述的前撞板,其特征在于,所述浮动板(14)或所述固定板(13)上设有第二限位槽(141),未设置所述第二限位槽(141)的所述浮动板(14)或所述固定板(13)上设有限位柱(131),所述前撞板发生碰撞时,所述限位柱(131)在所述第二限位槽(141)的范围内移动。
9.根据权利要求8所述的前撞板,其特征在于,所述主体(1)还包括:
10.一种清洁机器人,其特征在于,包括如权利要求1~9任一项所述的前撞板。
技术总结
本技术涉及清洁机器人技术领域,尤其涉及一种前撞板及清洁机器人。该前撞板设置在清洁机器人的壳体的前方,前撞板包括主体和弹片,主体与壳体连接,主体上设有卡槽,弹片设置在卡槽中,沿第一方向,弹片的两侧与卡槽过盈配合,当主体受外力撞击时,弹片能够发生弹性变形,该前撞板有利于简化前撞板结构,且便于组装,利用弹片的两侧与卡槽过盈配合,使前撞板左右和前方任意位置发生碰撞,均能触发弹性件吸收碰撞力,减少前撞板碰撞触发所需的触发力。
技术研发人员:蔡乙楠,孙博
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:20230222
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!