扫地机器人基站、扫地机器人系统以及清洁设备的制作方法
本技术实施例涉及生活电器,尤其涉及一种扫地机器人基站、扫地机器人系统以及清洁设备。
背景技术:
1、随着科技的发展和人们生活水平的提高,扫地机器人已逐渐得到广泛使用。扫地机器人通常配套有扫地机器人基站,比如扫地机器人完成清扫工作后,回到基站进行清洁、充电等操作。
2、其中,扫地机器人在回基站时需要爬坡进入至基站,然而现有的扫地机器人回站成功率较低。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本实用新型实施例提供了一种扫地机器人基站、扫地机器人系统以及清洁设备。
2、第一方面,本实用新型实施例提供了一种扫地机器人基站,包括基站主体以及连接在所述基站主体一侧的爬坡主体;
3、所述爬坡主体具有供扫地机器人进入至所述基站主体内的回站坡道,所述回站坡道包括抓爬台阶部以及爬坡坡段,所述爬坡坡段连接在所述抓爬台阶部的靠近所述基站主体的一侧,所述抓爬台阶部用于与所述扫地机器人配合以供所述扫地机器人上爬至所述爬坡坡段上;
4、在沿所述爬坡坡段的远离所述基站主体的一侧至所述爬坡坡段的靠近所述基站主体的一侧的方向上,所述爬坡坡段逐渐升高,且所述爬坡坡段的与所述抓爬台阶部连接的一侧的至少对应所述扫地机器人走行轮的位置处的高度低于所述抓爬台阶部的顶部高度。
5、本实用新型实施例提供的扫地机器人基站,通过在爬坡主体上设置供扫地机器人进入至基站主体内的回站坡道,使回站坡道包括抓爬台阶部以及爬坡坡段,爬坡坡段连接在抓爬台阶部的靠近基站主体的一侧,抓爬台阶部用于与扫地机器人配合以供扫地机器人上爬至爬坡坡段上,且使爬坡坡段在沿爬坡坡段的远离基站主体的一侧至爬坡坡段的靠近基站主体的一侧的方向上逐渐升高,这样通过设置抓爬台阶部,为扫地机器人提供抓爬基础,使扫地机器人顺利进入至爬坡坡段上,同时使爬坡坡段的与抓爬台阶部连接的一侧的至少对应扫地机器人走行轮的位置处的高度低于抓爬台阶部的顶部高度,即,降低了爬坡坡段的起始高度,从而提升了扫地机器人的上坡成功率,且在一定程度上实现了防滑,使扫地机器人能够更顺畅的行进至爬坡坡段上,进而顺利回站,提高了扫地机器人回站的成功率。
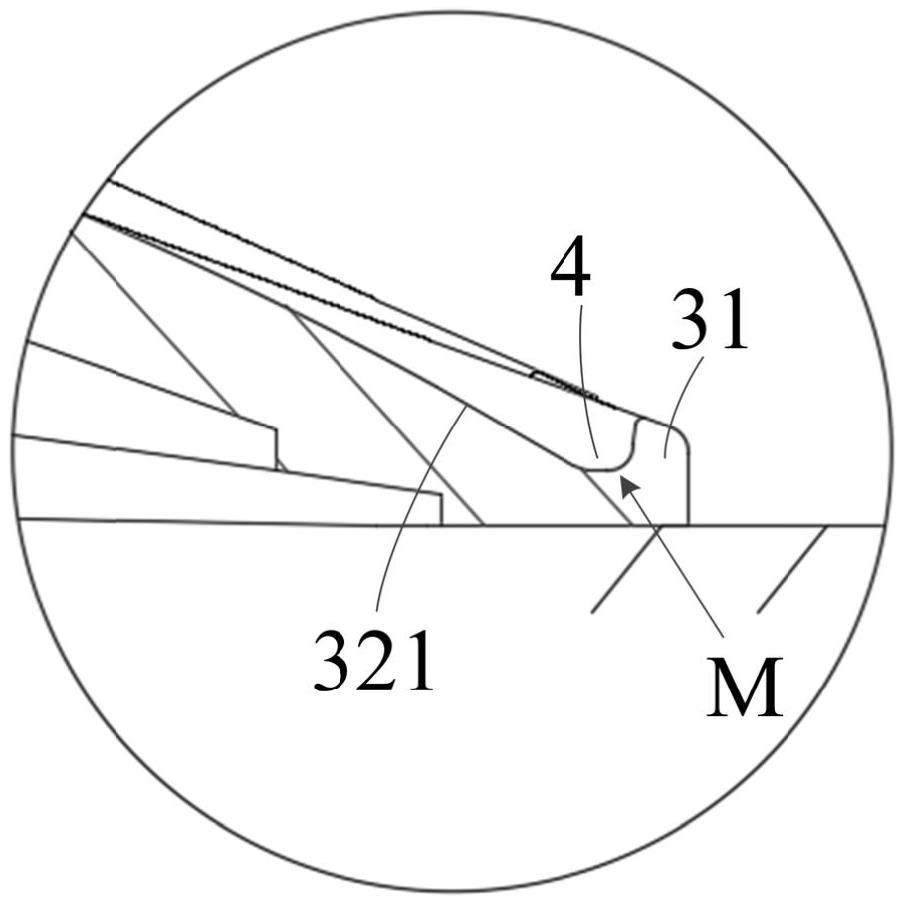
6、可选的,所述爬坡坡段的与所述抓爬台阶部连接的一侧的至少对应所述扫地机器人走行轮的位置处向下凹陷形成凹坑,以使所述爬坡坡段的与所述抓爬台阶部连接的一侧的至少对应所述扫地机器人走行轮的位置处的高度低于所述抓爬台阶部的顶部高度。
7、可选的,所述凹坑包括第一子凹坑和第二子凹坑,所述第一子凹坑和所述第二子凹坑在沿所述爬坡坡段的与所述抓爬台阶部连接的一侧的延伸方向上间隔设置,且所述第一子凹坑和所述第二子凹坑分别与所述扫地机器人两侧的走行轮一一对应。
8、可选的,所述凹坑的坑口边缘与位于所述坑口外周的坡面之间平滑过渡;
9、和/或,所述凹坑的深度为0.3mm-1mm。
10、可选的,所述爬坡坡段与所述抓爬台阶部的接合处平滑过渡。
11、可选的,所述爬坡坡段包括相连接的第一坡段和第二坡段,且所述第一坡段连接在所述抓爬台阶部和所述第二坡段之间;
12、所述第一坡段的斜率大于所述第二坡段的斜率。
13、可选的,至少所述第二坡段上设置防滑结构。
14、可选的,至少部分所述防滑结构包括朝向远离所述第二坡段的方向凸出的防滑凸筋。
15、可选的,所述防滑凸筋为多个,在沿所述第二坡段的靠近所述第一坡段的一侧至所述第二坡段的远离所述第一坡段的一侧的方向上,多个所述防滑凸筋依次间隔排布;
16、和/或,所述防滑凸筋与所述爬坡主体一体成型;
17、和/或,所述防滑凸筋的高度为0.3mm-1mm。
18、可选的,所述基站主体包括用于支撑所述扫地机器人的底托,所述爬坡主体位于所述底托的一侧,且与所述底托转动连接。
19、第二方面,本实用新型实施例提供了一种扫地机器人系统,包括扫地机器人以及如上所述的扫地机器人基站。
20、本实用新型实施例提供的扫地机器人系统,通过在其扫地机器人基站的爬坡主体上设置供扫地机器人进入至基站主体内的回站坡道,使回站坡道包括抓爬台阶部以及爬坡坡段,爬坡坡段连接在抓爬台阶部的靠近基站主体的一侧,抓爬台阶部用于与扫地机器人配合以供扫地机器人上爬至爬坡坡段上,且使爬坡坡段在沿爬坡坡段的远离基站主体的一侧至爬坡坡段的靠近基站主体的一侧的方向上逐渐升高,这样通过设置抓爬台阶部,为扫地机器人提供抓爬基础,使扫地机器人顺利进入至爬坡坡段上,同时使爬坡坡段的与抓爬台阶部连接的一侧的至少对应扫地机器人走行轮的位置处的高度低于抓爬台阶部的顶部高度,即,降低了爬坡坡段的起始高度,从而提升了扫地机器人的上坡成功率,且在一定程度上实现了防滑,使扫地机器人能够更顺畅的行进至爬坡坡段上,进而顺利回站,提高了扫地机器人回站的成功率。
21、第三方面,本实用新型实施例提供了一种清洁设备,包括衣物处理装置以及如上所述的扫地机器人系统,所述衣物处理装置位于所述扫地机器人基站的上方;
22、或者,包括衣物处理装置以及如上所述的扫地机器人基站,所述衣物处理装置位于所述扫地机器人基站的上方。
23、本实用新型实施例提供的清洁设备,通过在其扫地机器人基站的爬坡主体上设置供扫地机器人进入至基站主体内的回站坡道,使回站坡道包括抓爬台阶部以及爬坡坡段,爬坡坡段连接在抓爬台阶部的靠近基站主体的一侧,抓爬台阶部用于与扫地机器人配合以供扫地机器人上爬至爬坡坡段上,且使爬坡坡段在沿爬坡坡段的远离基站主体的一侧至爬坡坡段的靠近基站主体的一侧的方向上逐渐升高,这样通过设置抓爬台阶部,为扫地机器人提供抓爬基础,使扫地机器人顺利进入至爬坡坡段上,同时使爬坡坡段的与抓爬台阶部连接的一侧的至少对应扫地机器人走行轮的位置处的高度低于抓爬台阶部的顶部高度,即,降低了爬坡坡段的起始高度,从而提升了扫地机器人的上坡成功率,且在一定程度上实现了防滑,使扫地机器人能够更顺畅的行进至爬坡坡段上,进而顺利回站,提高了扫地机器人回站的成功率。同时,通过在扫地机器人基站的上方设置衣物处理装置,节省了清洁设备的占地面积。
技术特征:
1.一种扫地机器人基站,其特征在于,包括基站主体以及连接在所述基站主体一侧的爬坡主体;
2.根据权利要求1所述的扫地机器人基站,其特征在于,所述爬坡坡段的与所述抓爬台阶部连接的一侧的至少对应所述扫地机器人走行轮的位置处向下凹陷形成凹坑,以使所述爬坡坡段的与所述抓爬台阶部连接的一侧的至少对应所述扫地机器人走行轮的位置处的高度低于所述抓爬台阶部的顶部高度。
3.根据权利要求2所述的扫地机器人基站,其特征在于,所述凹坑包括第一子凹坑和第二子凹坑,所述第一子凹坑和所述第二子凹坑在沿所述爬坡坡段的与所述抓爬台阶部连接的一侧的延伸方向上间隔设置,且所述第一子凹坑和所述第二子凹坑分别与所述扫地机器人两侧的走行轮一一对应。
4.根据权利要求2所述的扫地机器人基站,其特征在于,所述凹坑的坑口边缘与位于所述坑口外周的坡面之间平滑过渡;
5.根据权利要求1所述的扫地机器人基站,其特征在于,所述爬坡坡段与所述抓爬台阶部的接合处平滑过渡。
6.根据权利要求1至5任一项所述的扫地机器人基站,其特征在于,所述爬坡坡段包括相连接的第一坡段和第二坡段,且所述第一坡段连接在所述抓爬台阶部和所述第二坡段之间;
7.根据权利要求6所述的扫地机器人基站,其特征在于,至少所述第二坡段上设置防滑结构。
8.根据权利要求7所述的扫地机器人基站,其特征在于,至少部分所述防滑结构包括朝向远离所述第二坡段的方向凸出的防滑凸筋。
9.根据权利要求8所述的扫地机器人基站,其特征在于,所述防滑凸筋为多个,在沿所述第二坡段的靠近所述第一坡段的一侧至所述第二坡段的远离所述第一坡段的一侧的方向上,多个所述防滑凸筋依次间隔排布;
10.根据权利要求1至5任一项所述的扫地机器人基站,其特征在于,所述基站主体包括用于支撑所述扫地机器人的底托,所述爬坡主体位于所述底托的一侧,且与所述底托转动连接。
11.一种扫地机器人系统,其特征在于,包括扫地机器人以及如权利要求1至10任一项所述的扫地机器人基站。
12.一种清洁设备,其特征在于,包括衣物处理装置以及如权利要求11所述的扫地机器人系统,所述衣物处理装置位于所述扫地机器人基站的上方;
技术总结
本技术实施例涉及一种扫地机器人基站、扫地机器人系统以及清洁设备,该扫地机器人基站包括基站主体和爬坡主体;爬坡主体具有回站坡道,回站坡道包括抓爬台阶部及爬坡坡段,爬坡坡段连接在抓爬台阶部的靠近基站主体的一侧,抓爬台阶部与扫地机器人配合以供扫地机器人上爬至爬坡坡段上;爬坡坡段在沿爬坡坡段的远离基站主体的一侧至爬坡坡段的靠近基站主体的一侧的方向上逐渐升高,且爬坡坡段的与抓爬台阶部连接的一侧的至少对应扫地机器人走行轮的位置处的高度低于抓爬台阶部的顶部高度,从而提高了扫地机器人回站的成功率。
技术研发人员:付仕波,邱灵敏
受保护的技术使用者:无锡小天鹅电器有限公司
技术研发日:20230227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!