一种仿尺蠖高空清洁机器人
本申请涉及高空清洁机器人,尤其涉及一种仿尺蠖高空清洁机器人。
背景技术:
1、随着科技水平的提高以及为了方便清洁高空玻璃,人们越来越倾向于采用高空清洁机器人来代替人工完成清洁工作。
2、相关技术中,高空清洁机器人主要是通过吸附灰尘后再使用滚筒进行清洁高空玻璃。
3、然而,本申请发明人在实现本申请实施例中发明技术方案的过程中,发现上述技术至少存在如下技术问题:
4、相关技术中的高空清洁机器人,对于一些顽固污渍难以彻底清洁干净,导致高空清洁机器人的清洁效果大打折扣,影响高空清洁机器人的清洁效率,在实际使用过程中的实用性不佳,难以满足使用需求。
技术实现思路
1、实用新型的目的:为克服现有技术中存在的不足,本申请提供一种仿尺蠖高空清洁机器人,所要解决的技术问题是如何使高空清洁机器人对于一些顽固污渍能清洁的更干净,进而提升高空清洁机器人的清洁效率。
2、技术方案:为实现上述目的,本申请所采用技术方案是:
3、本申请提供一种仿尺蠖高空清洁机器人,包括:机器人本体,负压吸盘和限位横框,所述负压吸盘位于机器人本体底部,所述限位横框位于机器人本体的一侧;
4、所述仿尺蠖高空清洁机器人还包括擦拭机构;
5、所述擦拭机构包括,清洁横板、连接座、驱动组件和清洁组件,所述清洁组件位于清洁横板底部,所述清洁横板位于所述限位横框一端的底部;
6、所述连接座一端与清洁横板固定连接,连接座的另一端与第二连杆铰接,所述连接座与所述限位横框内侧滑动连接,所述第二连杆一端设有第一连杆,第一连杆的一端与第二连杆的一端转动连接,第一连杆的另一端与机器人本体转动连接;
7、所述驱动组件带动第一连杆和第二连杆运动,第二连杆运动时推动清洁横板和清洁组件在玻璃上进行往复运动。
8、可选地,所述驱动组件包括,限位滑槽,第一转轴和第二转轴;
9、所述限位滑槽位于机器人本体上,所述限位滑槽与第一连杆的一端相匹配;
10、所述第一转轴位于第一连杆靠近机器人本体的一端,所述第转轴与机器人本体通过第一转轴转动连接;
11、所述第二转轴位于第一连杆靠近第二连杆一端,所述第一连杆与第二连杆通过第二转轴转动连接。
12、可选地,所述驱动组件还包括:伺服电机和连接环,所述伺服电机位于第一连杆的一侧,所述伺服电机与第一连杆通过连接环固定连接,所述连接环固定位于所述伺服电机的输出端。
13、可选地,所述驱动组件还包括:转动柱和传动转轴;
14、所述转动柱位于第一连杆靠近机器人本体的一端,所述转动柱与机器人本体通过轴承转动连接;
15、所述传动转轴位于第一连杆的内侧,所述传动转轴与第一连杆通过轴承转动连接。
16、所述清洁组件包括第一条形横槽、第二条形横槽、第一限位横板、第二限位横板和限位挡板;
17、所述第一条形横槽、第二条形横槽分别位于清洁横板底部;
18、所述第一限位横板位于第一条形横槽内并与其相匹配;
19、所述第二限位横板位于第二条形横槽内并与其相匹配;
20、所述限位挡板的上端设有与清洁横板上的卡槽相匹配的卡板,所述限位挡板的下端设有与第一限位横板的卡槽或/和第二限位横板上的卡槽相匹配的卡块,所述限位或/和第二限位横板相连接。
21、可选地,所述请清洁组件还包括清洁布和清洁海绵;
22、所述清洁布、清洁海绵分别位于清洁横板底部且远离机器人本体的一侧,所述述清洁布位于清洁海绵的上方;
23、所述清洁布与第一限位横板固定连接;
24、所述清洁海绵与第二限位横板固定连接。
25、通过设置清洁组件来擦拭玻璃上的灰尘,在使用过程中,清洁布位于清洁海绵的上方,自动喷头喷出清洁剂,通过清洁布对灰尘进行擦拭,然后清洁海绵对清洁布擦拭过的位置再一次擦拭,且清洁海绵和清洁布上的限位横板可以从清洁横板上便捷的拆卸下来,以便于对清洁海绵和清洁布进行更换,操作方便,使得清洁机器人更加有利于使用。
26、可选地,所述仿尺蠖高空清洁机器人还包括清洁剂盒和自动喷头,所述清洁剂盒位于清洁横板的顶部两端,清洁剂盒与清洁横板固定连接,所述自动喷头位于清洁剂盒上。
27、本申请提供的技术方案带来的有益效果至少包括:
28、相比现有技术,本申请通过在机器人本体上设置擦拭机构来将高空玻璃擦拭干净,机器人本体吸附在玻璃上,通过驱动组件带动第一连杆和第二连杆运动,第二连杆推动清洁横板进行往复运动,清洁横板通过清洁组件对玻璃进行清洁,结构简单,有利于使得清洁机器人对玻璃清洁的更加干净,大大增强了清洁机器人的清洁效果,提高了清洁机器人的清洁效率,避免现有高空清洁机器人对于一些顽固污渍难以彻底清洁干净的情况,提升了该清洁机器人的清洁效率。
29、附图说明
30、为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
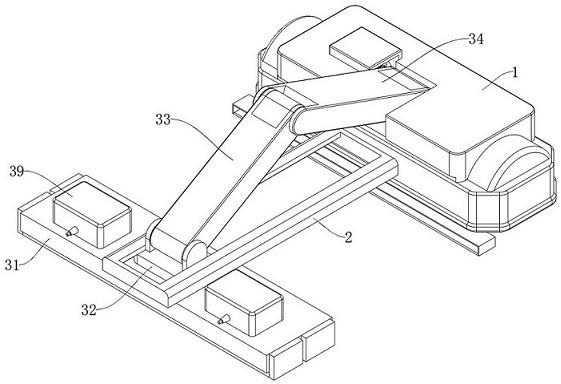
31、图1为本申请一优选实施例的整体结构示意图;
32、图2为本申请一优选实施例的的正面立体剖视图;
33、图3为本申请一优选实施例的的侧面立体剖视图;
34、图4为本申请一优选实施例的擦拭机构的局部结构爆炸图;
35、图5为本申请一优选实施例的清洁组件的结构爆炸图。
技术特征:
1.一种仿尺蠖高空清洁机器人,包括:机器人本体(1),负压吸盘(4)和限位横框(2),所述负压吸盘(4)位于机器人本体(1)底部,所述限位横框(2)位于机器人本体(1)的一侧,其特征在于:
2.根据权利要求1所述的仿尺蠖高空清洁机器人,其特征在于,所述驱动组件(37)包括,限位滑槽(371),第一转轴(36)和第二转轴(35);
3.根据权利要求1或2所述的仿尺蠖高空清洁机器人,其特征在于,所述驱动组件(37)还包括:伺服电机(372)和连接环(373),所述伺服电机(372)位于第一连杆(34)的一侧,所述伺服电机(372)与第一连杆(34)通过连接环(373)固定连接,所述连接环(373)固定位于所述伺服电机(372)的输出端。
4.根据权利要求1或2所述的仿尺蠖高空清洁机器人,其特征在于,所述驱动组件(37)还包括:转动柱(375)和传动转轴(374);
5.根据权利要求1所述的仿尺蠖高空清洁机器人,其特征在于,所述清洁组件(38)包括第一条形横槽(381)、第二条形横槽(382)、第一限位横板(383)、第二限位横板(384)和限位挡板(387);
6.根据权利要求5所述的仿尺蠖高空清洁机器人,其特征在于,所述清洁组件(38)还包括清洁布(385)和清洁海绵(386);
7.根据权利要求1所述的仿尺蠖高空清洁机器人,其特征在于,所述仿尺蠖高空清洁机器人还包括清洁剂盒(39)和自动喷头(391),所述清洁剂盒(39)位于清洁横板(31)的顶部两端,清洁剂盒(39)与清洁横板(31)固定连接,所述自动喷头(391)位于清洁剂盒(39)上。
技术总结
本申请关于一种仿尺蠖高空清洁机器人,涉及高空清洁机器人技术领域,其包括,机器人本体,负压吸盘以及限位横框,该清洁机器人还包括擦拭机构,驱动组件和清洁组件,擦拭机构包括设置于限位横框一端底部的清洁横板,以及固定设置于清洁横板上并与限位横框内侧滑动连接的连接座,连接座上铰接设置有第二连杆,在第二连杆的一端设有第一连杆;驱动组件带动第一连杆和第二连杆运动,第二连杆运动时推动清洁横板和清洁组件在玻璃上进行往复运动。本申请解决了现有清洁机器人对于一些顽固污渍难以彻底清洁干净的情况,有利于使得清洁机器人对玻璃清洁的更加干净,大大增强了清洁机器人的清洁效果,提高了清洁机器人的清洁效率。
技术研发人员:吴翔宇,沈天奥,张航,陈健,江正仙
受保护的技术使用者:江南大学
技术研发日:20230303
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!